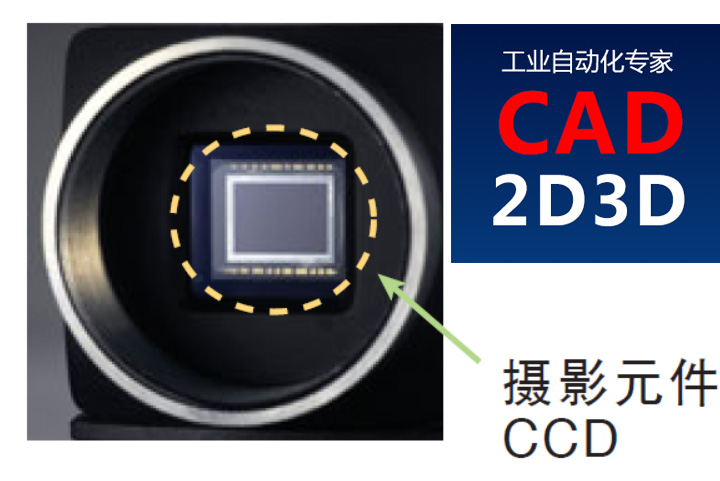
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理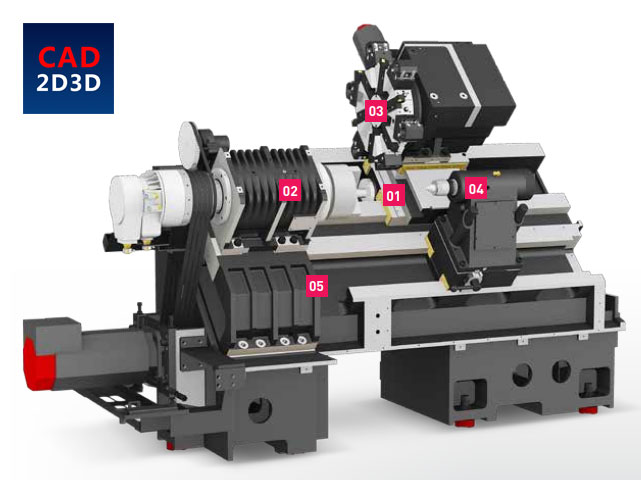 车床主轴夹紧工件的方法和原理,回转拉紧油缸和动力卡盘缺一不可
车床主轴夹紧工件的方法和原理,回转拉紧油缸和动力卡盘缺一不可- 汽车倒车雷达并不是雷达,而是超声波,两者响应速度差十万八千里
- 民企老板最看重工厂信息化的7个模块,脱离工厂需求的信息化一文不值
- 被密封管螺纹标准上的2个的基准平面图搞晕了,原来将内外两个螺纹的图放在一起看,基准平面的含义一下了通俗易懂了
- 螺纹密封时缠绕带的使用要求,螺纹部留出1.5~2个螺距处开始缠绕
- 圆锥密封管螺纹紧固拧紧力矩,Rc螺纹配管拧紧扭矩要求
- 电磁波、激光、雷达和超声波测距有什么区别和联系?
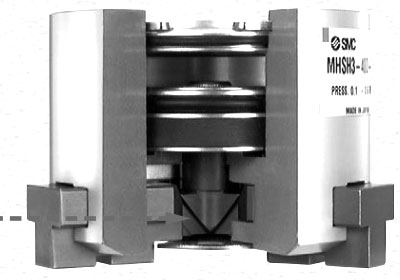 平行开闭型手爪内部结构,手爪夹持力计算方法,手爪选型方法步骤
平行开闭型手爪内部结构,手爪夹持力计算方法,手爪选型方法步骤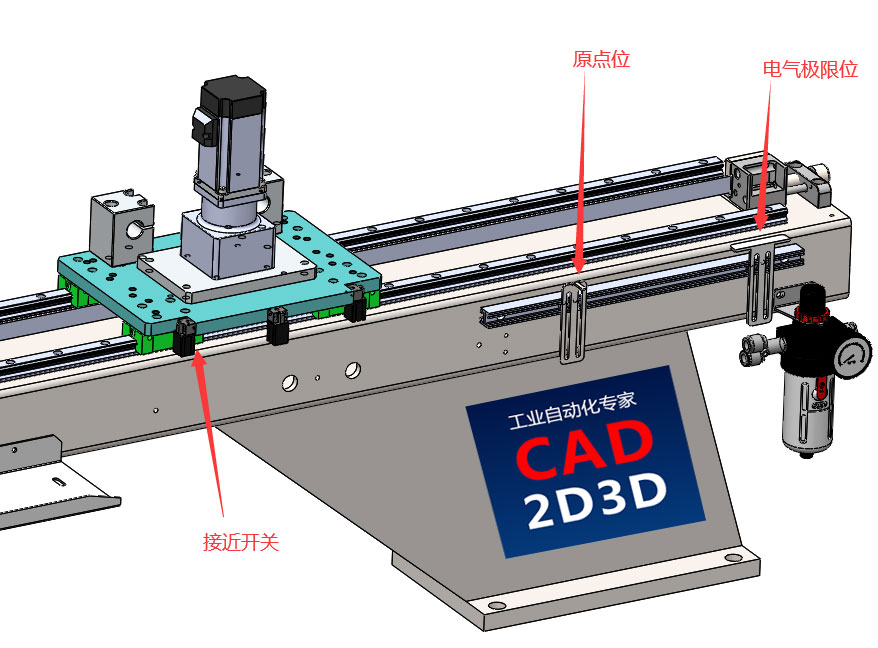 机械手每次启动后为什么要回原点,而工业机器人就不用?
机械手每次启动后为什么要回原点,而工业机器人就不用? 普通胶轮、尼龙轮和聚氨酯轮的材料特性对比,聚氨酯轮最全面
普通胶轮、尼龙轮和聚氨酯轮的材料特性对比,聚氨酯轮最全面- 砂芯浸涂池涂料池自动供料装置,池底沉淀问题如何解决?
- SolidWorks草图中快速选中文字的两种方法:缩小或右键属性
 FANUC机器人离线编程,三维直接生成路径,复杂零件快速生成打磨、焊接等路径程序
FANUC机器人离线编程,三维直接生成路径,复杂零件快速生成打磨、焊接等路径程序 滚筒(辊筒)输送机输送速度范围,如何计算输送速度、减速比等
滚筒(辊筒)输送机输送速度范围,如何计算输送速度、减速比等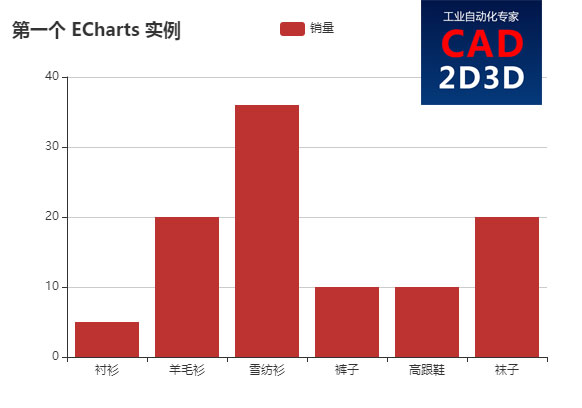 数据采集与监视控制系统(SCADA)图表可视化实现方法 — ECharts 库,支持曲线图、饼状图、柱状图、区域图、雷达图等
数据采集与监视控制系统(SCADA)图表可视化实现方法 — ECharts 库,支持曲线图、饼状图、柱状图、区域图、雷达图等 使用Photoshop制作印章的方法,附PSD源文件下载
使用Photoshop制作印章的方法,附PSD源文件下载- 机加工工艺流程和节拍计算表,山特维克刀具公司内部使用的节拍自动计算表格
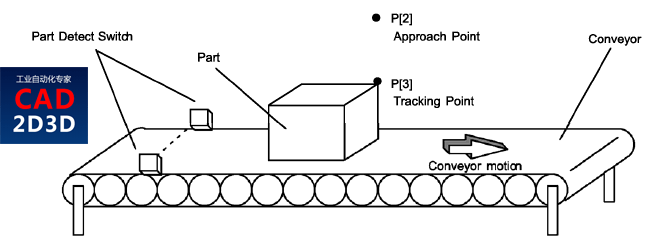 FANUC 机器人 Line Tracking 线性追踪技术使用方法详解
FANUC 机器人 Line Tracking 线性追踪技术使用方法详解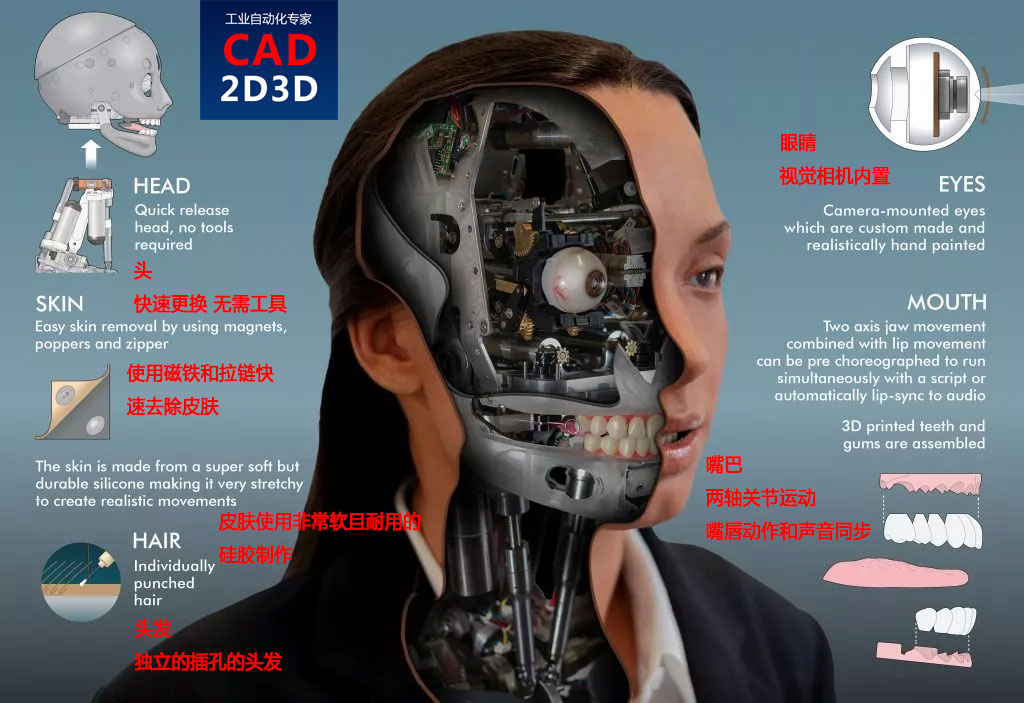 仿人机器人头部构造,内部组成和实现方式
仿人机器人头部构造,内部组成和实现方式 有点疯狂,机器人+视觉,识别喉咙内目标位置,实现病毒自动取样
有点疯狂,机器人+视觉,识别喉咙内目标位置,实现病毒自动取样- 驾车切记不要跟在罐车后面,如果追尾造成罐车尾部阀门箱损坏,造成LNG泄露,可能引发严重后果
- 机器人软浮动,解决取放件时位置偏差
CAD画家3D模型免费下载,用3D看世界,让自动化更简单
CAD画家 提供工业自动化各种机械设备、自动化专机、电气控制装置等2D图纸/3D模型源文件下载。学习机械设计和电气控制等知识教程,分享新工艺、新技术、新产品,汇集自动化和电气控制行业专家,提供工业自动化行业整体技术解决方案。
