- 深度学习(deep learning)会不会让机器突破限制,摆脱人类控制?
 零基础学习工业机器人的操作使用
零基础学习工业机器人的操作使用- 工业机器人用户坐标系(user frame)的含义以及用法详解,巧妙使用PR存储相对位置,切换用户坐标系,即可执行相同动作
- 三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
- 工业机器人精度的含义,位置精度、轨迹精度、超调状态详细讲解
- 锻造自动化生产设计注意事项、问题点汇总
- 铝合金重力浇铸模具预热温度及步骤
- 机器人手爪手指受力变形分析,挠度计算方法,有限元分析应力及应变
- FANUC 3D Area 3D视觉系统构成及原理
- 高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
- 同步开合平行气缸(卡爪)内部构造大全,齿轮齿条、双齿轮、连杆机构、导向槽滑块式
 大行程旋转夹紧定心三爪,相比普通三爪,夹持范围更大
大行程旋转夹紧定心三爪,相比普通三爪,夹持范围更大 机器人手爪设计,摆动式手爪块,跟随表面,抓取更牢靠
机器人手爪设计,摆动式手爪块,跟随表面,抓取更牢靠- 零基础学习工业机器人的操作使用(图文和视频教程)
- 锻造自动化生产线(机器人上下料)如何设计,生产线难点以及潜在风险点和应对措施
- 液压装置上用的压力开关(传感器)内部构造和检测原理
- 什么是机器人奇异点,以及如何奇异点的解决方法(以FANUC机器人为例)
- 生产线/设备故障率的定义和计算公式
- 2D视觉识别工件种类,采用大景深的相机,可以满足1米高度差
 电容式接近传感器原理及应用案例
电容式接近传感器原理及应用案例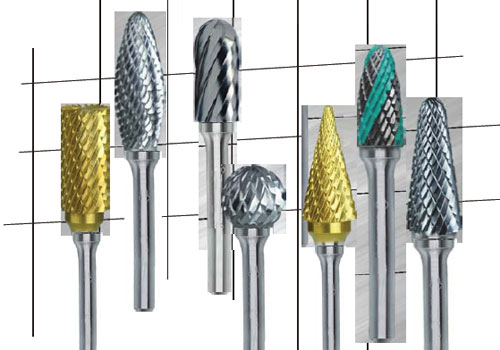 打磨工具旋转锉选型方法步骤,根据材料、要求选择齿型和转速
打磨工具旋转锉选型方法步骤,根据材料、要求选择齿型和转速- 机加工表面粗糙度等级 视觉触觉对比判别法
 如何利用视觉相机识别区分平垫片正反面?
如何利用视觉相机识别区分平垫片正反面?
CAD画家3D模型免费下载,用3D看世界,让自动化更简单
CAD画家 提供工业自动化各种机械设备、自动化专机、电气控制装置等2D图纸/3D模型源文件下载。学习机械设计和电气控制等知识教程,分享新工艺、新技术、新产品,汇集自动化和电气控制行业专家,提供工业自动化行业整体技术解决方案。
