- 平衡气缸工作原理及应用
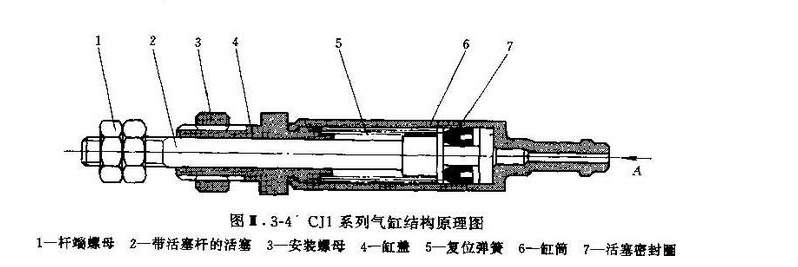 单作用气缸和双作用气缸的区别
单作用气缸和双作用气缸的区别- 国外做的基本偏差系列图,形象直观,一看就懂
- 机加工金属切削刀具供应商品牌大全
- 机器人重复定位精度的含义,日本和ISO机器人测定标准有何不同?
- FANUC 3D视觉相机 3DV/400 规格参数及使用详解
- 机器人力传感器型号规格参数
- 线轨和硬轨有什么区别,机床应该如何选择?
- 剪刀折叠式平行四连杆伸缩节结构原理和应用案例
- 机器人焊接,只能平焊,通常配翻转变位机
 SolidWorks 焊件钢结构件,工程图快速生成切割清单列表,含数量、规格、长度
SolidWorks 焊件钢结构件,工程图快速生成切割清单列表,含数量、规格、长度- 选用打印捕捉功能将 SolidWorks 画面另存为JPG格式高清大图
- 机器人本体和控制柜之间的电气连接
 圆柱销有2个标准GB/T119.1和GB/T119.2,材料和热处理不同,选用时还要注意销孔配合关系,推荐选用H7/m6
圆柱销有2个标准GB/T119.1和GB/T119.2,材料和热处理不同,选用时还要注意销孔配合关系,推荐选用H7/m6- 销类型及规格尺寸大全(圆柱销、圆锥销、开口销、弹簧销)— 日本机械图样解读
- 磁力吸盘开合原理,为什么底部要开V型槽?
- 螺栓螺钉紧固力矩要求(来自日本经典技能丛书)
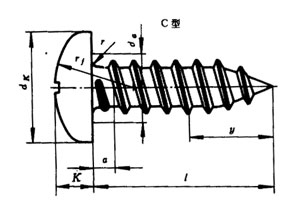 自攻螺钉系列标准及结构原理和规格型号说明
自攻螺钉系列标准及结构原理和规格型号说明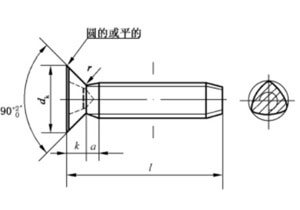 自挤螺钉系列标准及结构原理和规格型号说明
自挤螺钉系列标准及结构原理和规格型号说明 日本发那科FANUC M-710iC 系列(50/70/50H) 机器人参数表及说明
日本发那科FANUC M-710iC 系列(50/70/50H) 机器人参数表及说明- 工业机器人从入门到进阶—如何选型 PPT演示文稿下载
 什么是协作机器人?
什么是协作机器人?- 工业机器人从入门到进阶—什么是工业机器人? PPT演示文稿下载
CAD画家3D模型免费下载,用3D看世界,让自动化更简单
CAD画家 提供工业自动化各种机械设备、自动化专机、电气控制装置等2D图纸/3D模型源文件下载。学习机械设计和电气控制等知识教程,分享新工艺、新技术、新产品,汇集自动化和电气控制行业专家,提供工业自动化行业整体技术解决方案。
