- 暗藏玄机,FANUC机器人负荷计算分析表详解,原来好多内容都被隐藏了,附文件保护破解密码
- 机器人拖链实际形状,中间段会耷拉下来,需设置支撑托板
- KUKA机器人 KR 600 R2830 技术规格书
 KUKA机器人 KR600液压平衡缸结构组成及规格参数
KUKA机器人 KR600液压平衡缸结构组成及规格参数- 机器人三接地,需要直接接地
- 机器人手腕部负载曲线图各线条含义及绘制方法,深入挖掘,会有不一样的发现
 加工中心对刀仪和数控车床对刀仪
加工中心对刀仪和数控车床对刀仪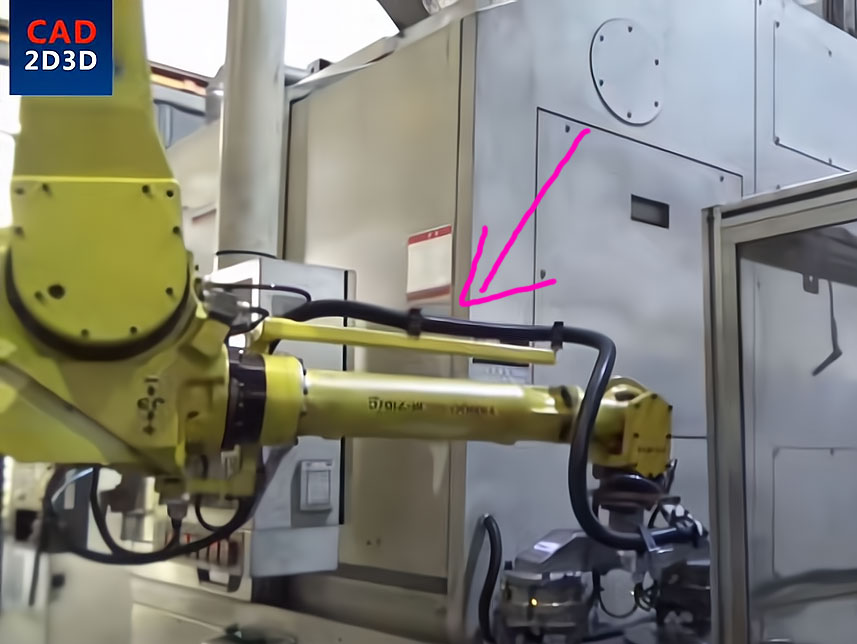 机器人管线包的固定方式,来自日本FANUC官方案例
机器人管线包的固定方式,来自日本FANUC官方案例- 西门子PLC和三菱PLC的区别,如何选择通讯协议
- 机器人J1轴后方有10°盲区,能从屁股后面取放件吗?
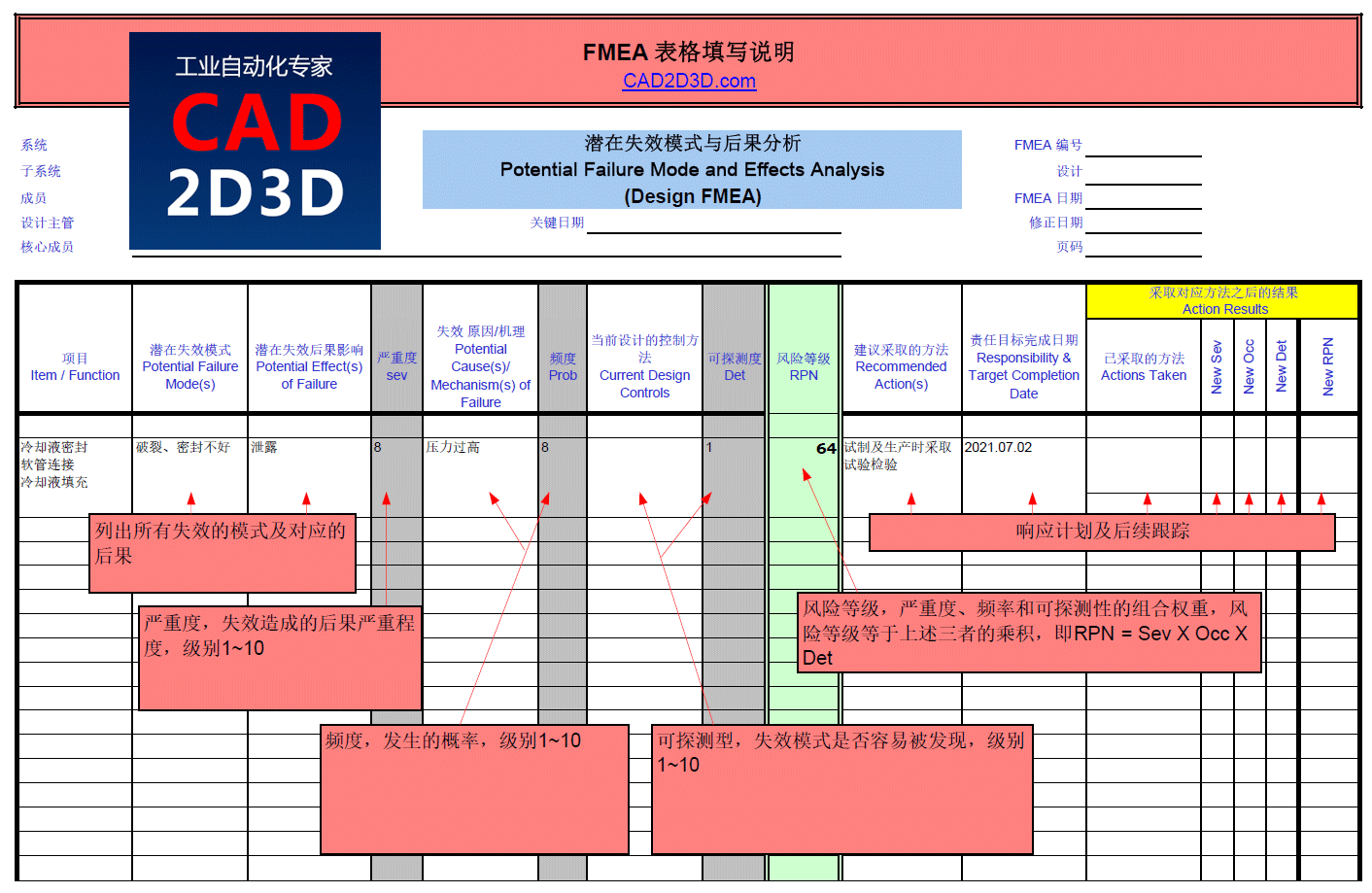 潜在失效模式与后果分析(FMEA)表格模板免费下载,附严重度、频度、可探测度的定义说明
潜在失效模式与后果分析(FMEA)表格模板免费下载,附严重度、频度、可探测度的定义说明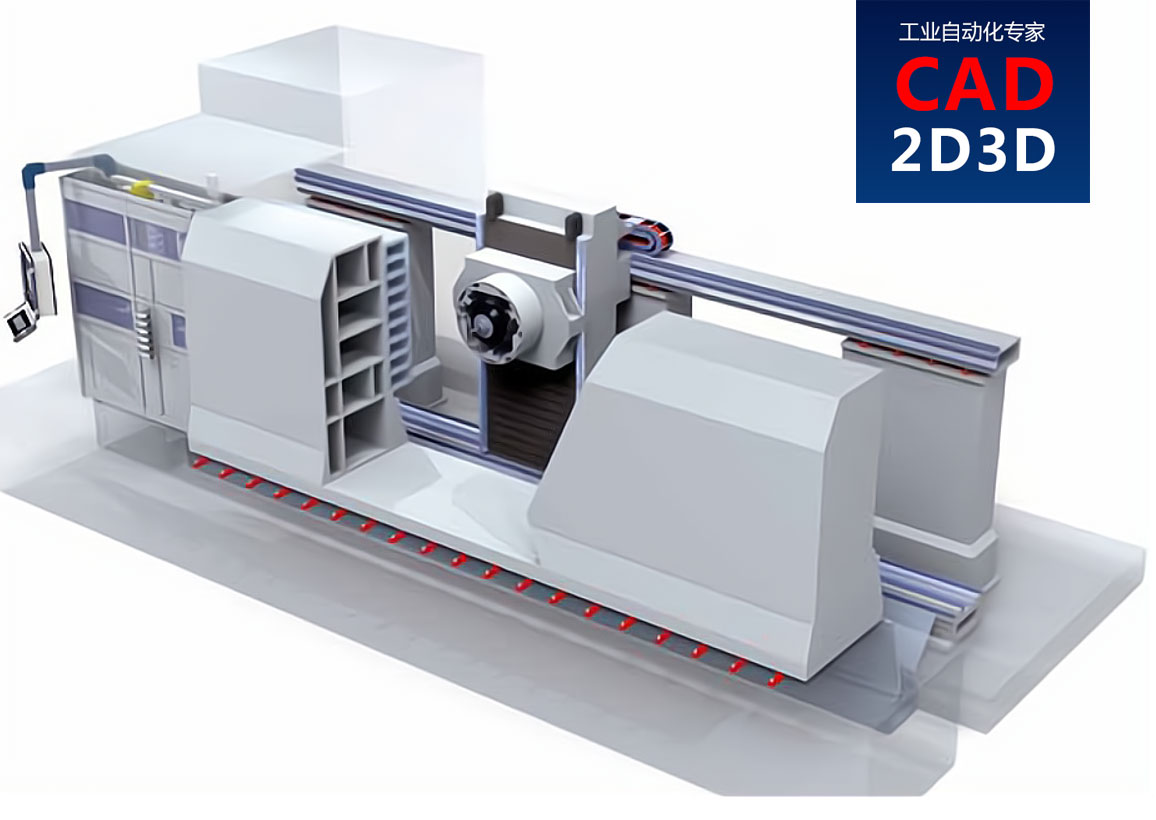 瑞士斯达拉格(Starrag)卧式5轴加工中心Ecospeed机床技术规格书和主轴论文
瑞士斯达拉格(Starrag)卧式5轴加工中心Ecospeed机床技术规格书和主轴论文- 什么是6轴工业机器人奇异点?What are Singularities in a Six-Axis Robot Arm?
- 被坑了,机器人走不了直线,除了定位精度,原来还有重复路径精度
- 西门子PLC价格,S7-1200约15000元,S7-1500约20000元
 隔行如隔山,原来气动打标机打印的圆点状二维码是这么一回事
隔行如隔山,原来气动打标机打印的圆点状二维码是这么一回事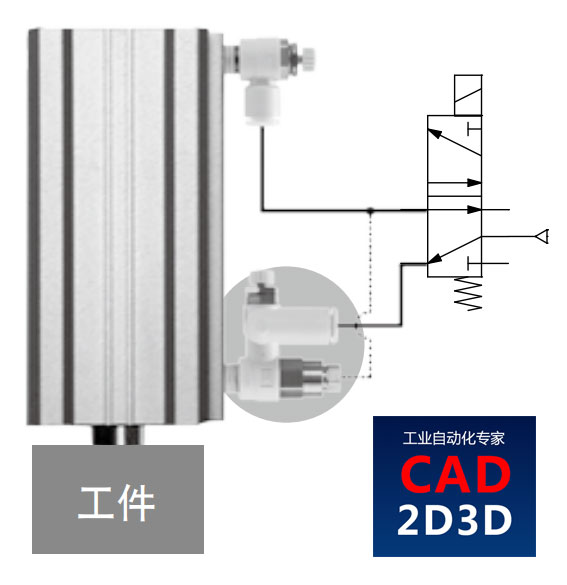 带先导式单向阀的内部构造和原理,断气保护,防止气缸掉落
带先导式单向阀的内部构造和原理,断气保护,防止气缸掉落 气缸速度调节阀内部构造和原理,排气节流和进气节流的特性及动作比较
气缸速度调节阀内部构造和原理,排气节流和进气节流的特性及动作比较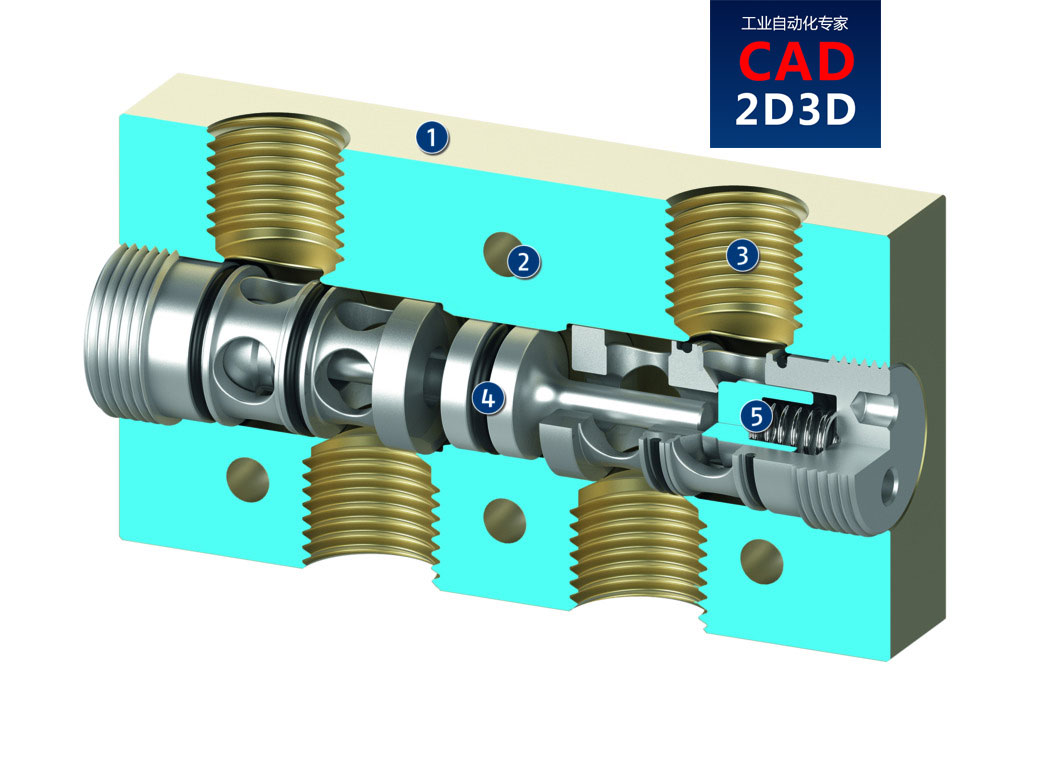 保压阀内部构造和原理,气缸断气自动保压,防止工件掉落
保压阀内部构造和原理,气缸断气自动保压,防止工件掉落 机器人打磨恒力浮动工具及案例,打磨去毛刺解决方案
机器人打磨恒力浮动工具及案例,打磨去毛刺解决方案- 机器人J2轴为什么要加平衡缸?99%机械工程师选择了视而不见
- 气动打标机针头内部结构和原理,针头高频冲击是如何实现的?
- 如何识别气动打标机打印的点状二维码,扫码器需要倾斜15°安装
CAD画家3D模型免费下载,用3D看世界,让自动化更简单
CAD画家 提供工业自动化各种机械设备、自动化专机、电气控制装置等2D图纸/3D模型源文件下载。学习机械设计和电气控制等知识教程,分享新工艺、新技术、新产品,汇集自动化和电气控制行业专家,提供工业自动化行业整体技术解决方案。
