
机器人校核就是用来判断机器人末端执行器(含手爪、工件等)重量、扭矩、转动惯量是否在规格要求范围内,一般都是只校核4/5/6 三轴,如果4/5/6轴可以满足,则1/2/3轴肯定也可以满足。
校核方法
- 计算末端执行器重量、外形尺寸、中心位置
- 初选机器人规格型号,在校核表内输入上述参数,会自动计算出4/5/6轴实际扭矩、转动惯量
- 自动判断实际参数值是否符合规格要求
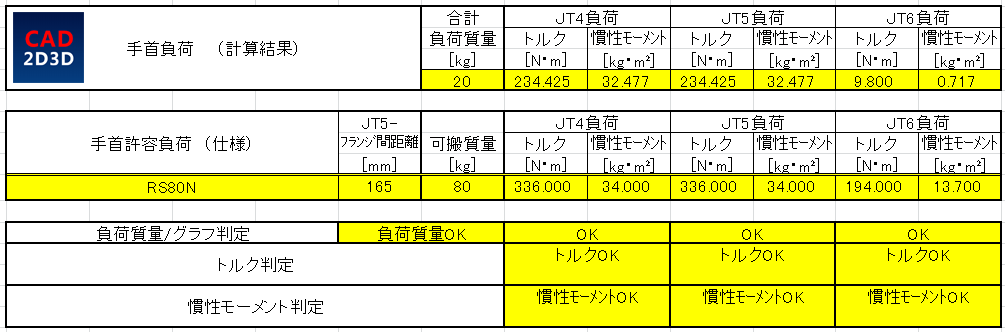
校核表计算结果
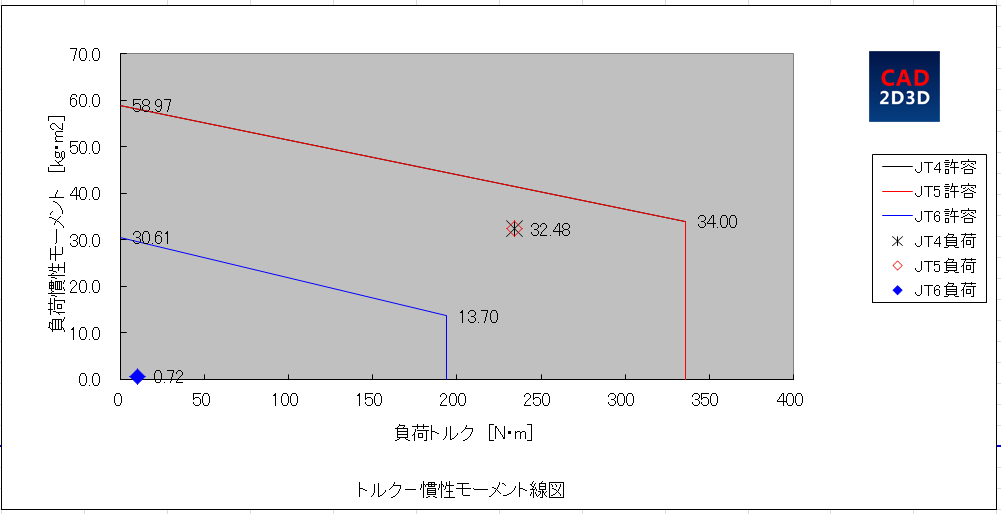
校核结果曲线
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:江苏一棵树 原文链接:https://www.cad2d3d.com/post-1181.html




 FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图
FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图 工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂
工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂