

那么番茄采摘器人实际上是如何工作的呢?
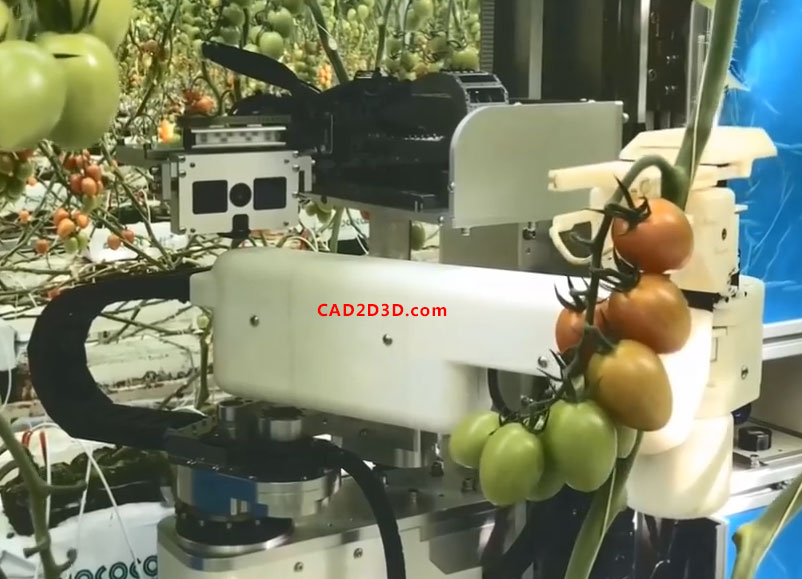
机器人沿着铺设在番茄之间的导轨上移动,机器人配备了具有图像识别功能的相机,使用它来查找成熟的西红柿,并通过颜色确定是否应该采摘它们。先让西红柿穿过机器人手爪上的一个环,然后拉动这个环,将番茄摘下。

目前机器人采摘西红柿的速度是6秒每个,而人工是2-3秒,因此人工速度更快,但人只能工作3-4个小时,而机器人可以连续工作10个小时或更长时间,而且也可以在晚上工作,因此机器人采摘是为了趋势。
番茄采摘机器人开发的问题之一是如何判断番茄是否成熟。
解决问题的焦点放在颜色变化上,没成熟的是青色的,成熟的是红色的。基于颜色差异,采用了视觉识别系统,该系统可以自动识别番茄的颜色,并将其与农场生产的颜色样本进行比较以确定其成熟程度。
颜色样本范围可以自由设置。如果要降低成熟度以增加产量,则只需更改设置即可,使其比正常情况更接近绿色范围。
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:江苏一棵树 原文链接:https://www.cad2d3d.com/post-1261.html




 比亚迪仰望U9发布,光车重就比保时捷911重55%,168万元真的是良心价
比亚迪仰望U9发布,光车重就比保时捷911重55%,168万元真的是良心价 一个非标自动化项目,真的是电气扛下了所有吗?
一个非标自动化项目,真的是电气扛下了所有吗?