
机器人精度是机器人选型的重要参数,所有的机器人厂家都会提供一个机器人重复定位精度,其实除了位置精度,还有轨迹精度。
精度专题:https://www.cad2d3d.com/search.php?keywords=精度&type=all
1.位置精度
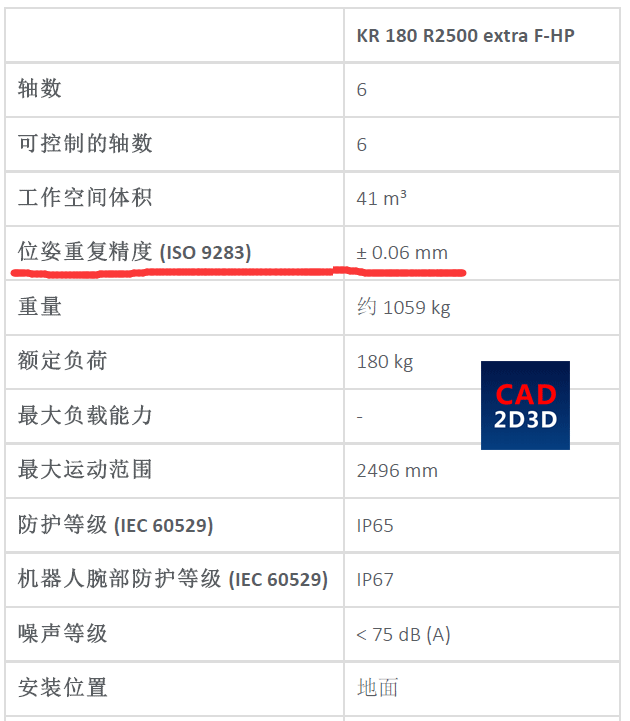
位置精度包括位置绝对精度(准确度)和位姿重复精度,下面以KUKA 180Kg 机器人为例,位置绝对精度±0.7mm,比重复定位精度高出一个数量级。
| 位置绝对精度 | ±0.7mm |
| 位姿重复精度 | ±0.06mm |
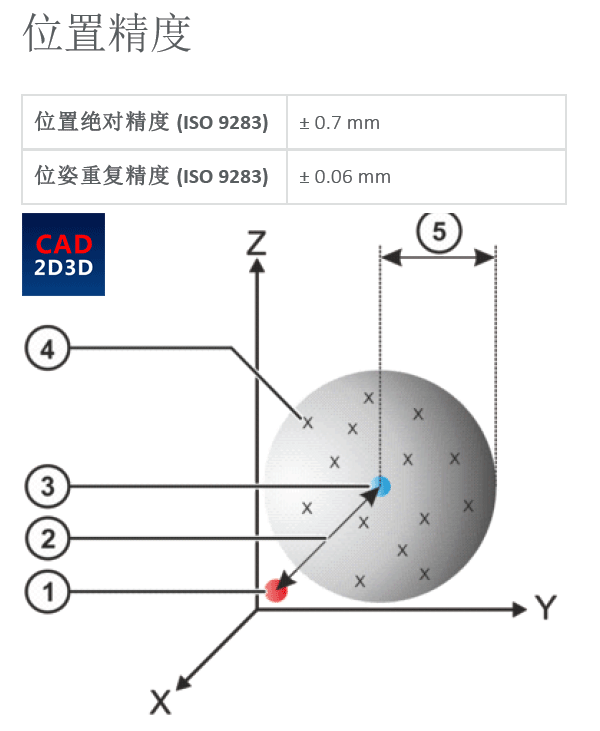
| 1 | 编程设定的位置 | 4 | 测得位置 |
| 2 | 位置绝对精度 | 5 | 位置重复精度 |
| 3 | 测得位置的平均值 |
位置精度表示编程的机器人位置和实际占用的机器人位置之间的偏差,并用坐标测量机(CMM)在 9 个位置测量。
重复精度由重复 30 次测量时实际占用的机器人位置的偏差得出。
对于定位精确的机器人,这些值针对的是机器人基座。
2. 轨迹精度
轨迹精度分为线性轨迹精度和圆周运动轨迹精度。
线性运动的轨迹精度:
该数据针对的是 1 m/s 的参考速度。
| LIN轨迹绝对精度(ISO 9283) | ±1.4mm |
| SLIN轨迹绝对精度 | ±1.2mm |
| 轨迹重复精度 线性 | ±0.2mm |
圆周运动的轨迹精度:
该数据针对的是 0.5 m/s 的参考速度。
| CIRC轨迹绝对精度(ISO 9283) | ±1mm |
| SCIRC轨迹绝对精度 | ±0.8mm |
| 圆周轨道重复精度 | ±0.4mm |
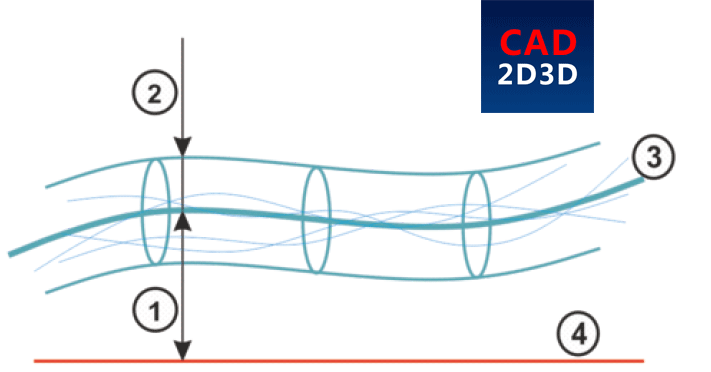
轨迹精度
| 1 | 轨迹绝对精度 | 3 | 运行轨迹的平均值 |
| 2 | 轨迹重复精度 | 4 | 编程的轨迹 |
轨迹精度表示机器人在编程的轨迹上运动的能力。
轨迹重复精度表示 10 个运行轨迹与运行轨迹平均值的偏差。
3. 超调状态
| 振幅 | 0.4mm |
| 定位时间 | 0.5s |
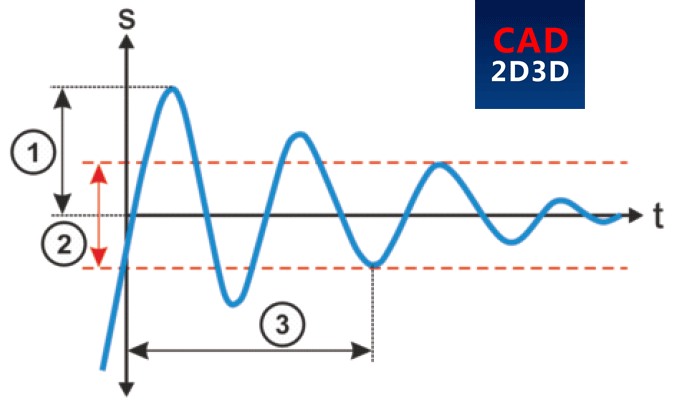
| 1 | 超调振幅 | 3 | 定位时间 |
| 2 | 公差范围 |
超调振幅影响机器人在特定位置执行受控的精确暂停的能力。定位时间表示机器人在特定位置上停止的速度。
附加说明:
给出的数据基于 ISO 9283,并使用 Krypton/Metris 的基于摄像机的系统测得。因此重复精度被定义为 3 sigma 值。
所有数值均以额定负载测得。
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:CAD画家 原文链接:https://www.cad2d3d.com/post-1336.html




 FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图
FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图 工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂
工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂