

机器人有多种坐标系,常用的World/User/Tool三种坐标系,调试机器人时可以根据需要切换不同的坐标系,Tool坐标系在机器人末端法兰盘,移动机器人末端时最方便直接,今天就来介绍一下Tool坐标系的用法。
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:CAD画家 原文链接:https://www.cad2d3d.com/post-1356.html




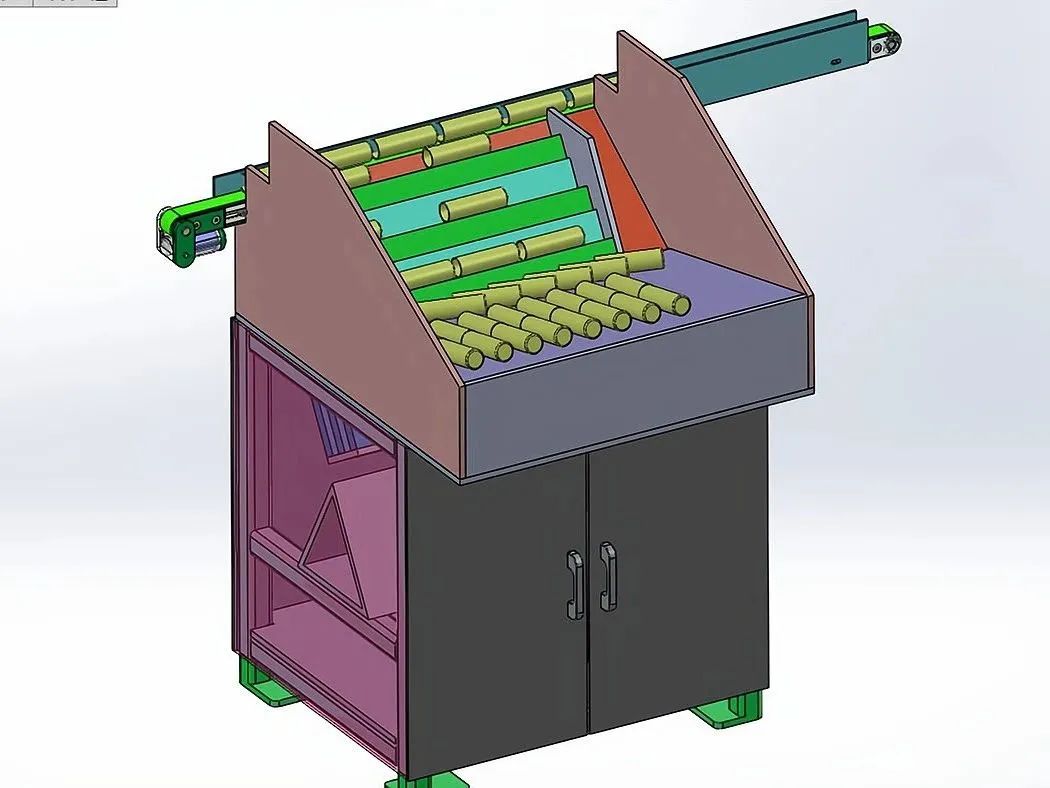 干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置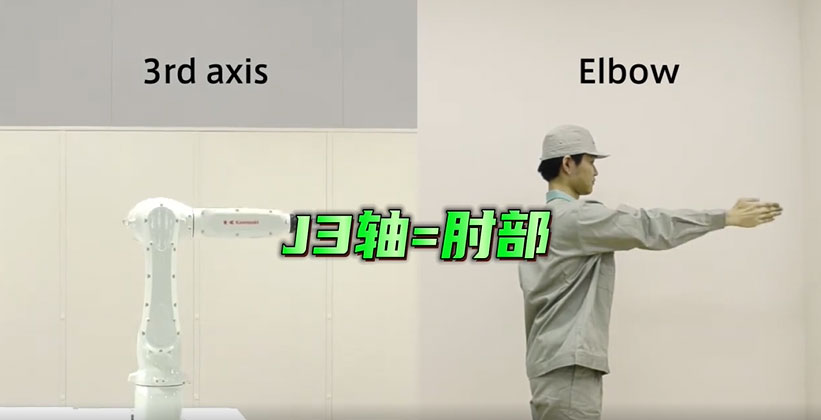 不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
不叫机械臂,就叫机器人,都是关节运动,跟人一模一样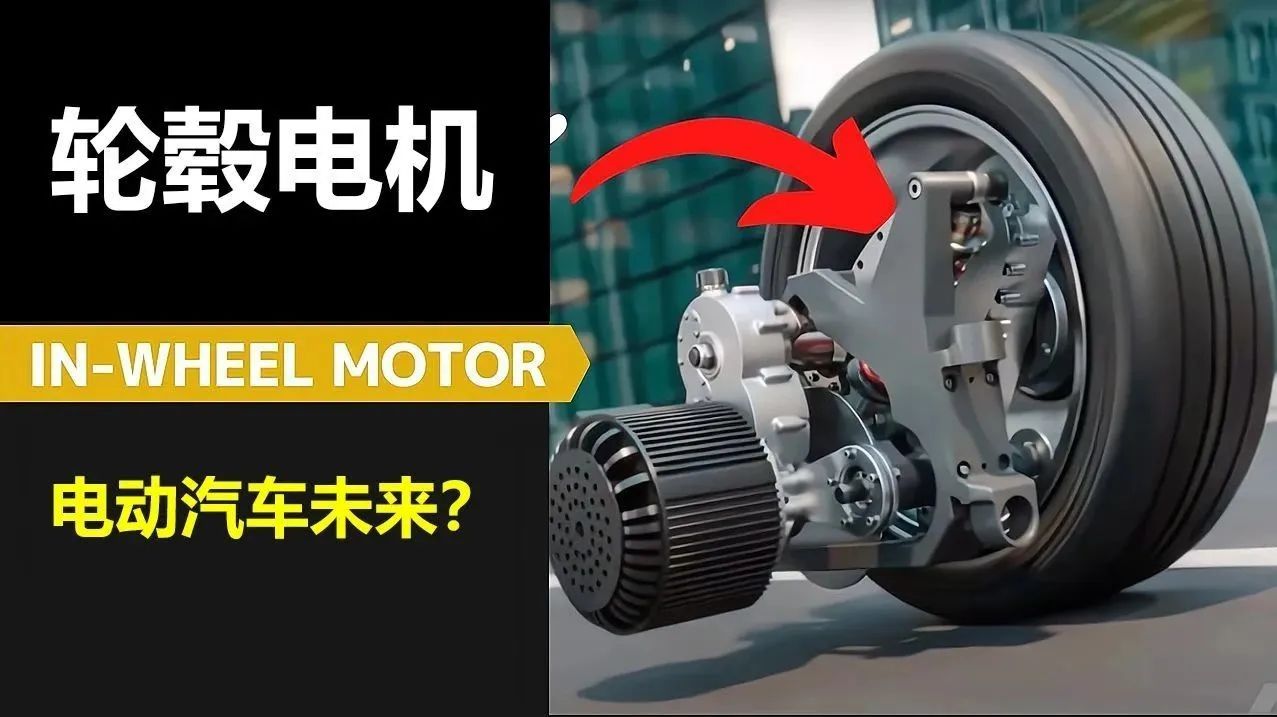 干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美 两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代 国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?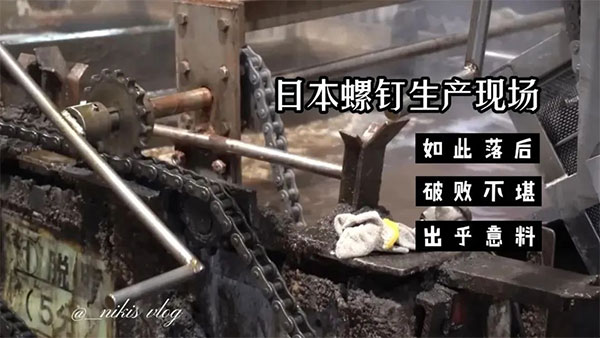 日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮 纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美