
常见的6轴机器人,机器人控制器控制6个轴动作利用差补方法实现机器人终端路径行走,6轴联动,精度很差,因此很难利用机器人行走实现高精度的直线、圆弧、面等路径。比如轴孔装配,由于机器人重复路径精度不高,轴可能会卡在孔中间,很难将轴完全插入到孔内。
为了利用机器人来实现高精度的路径,我们可以借助辅助工装和机器人软浮动功能,辅助工装纠正路径,机器人提供动力,比如可以利用导轨滑块实现高精度路径,机器人提供前进的动力。
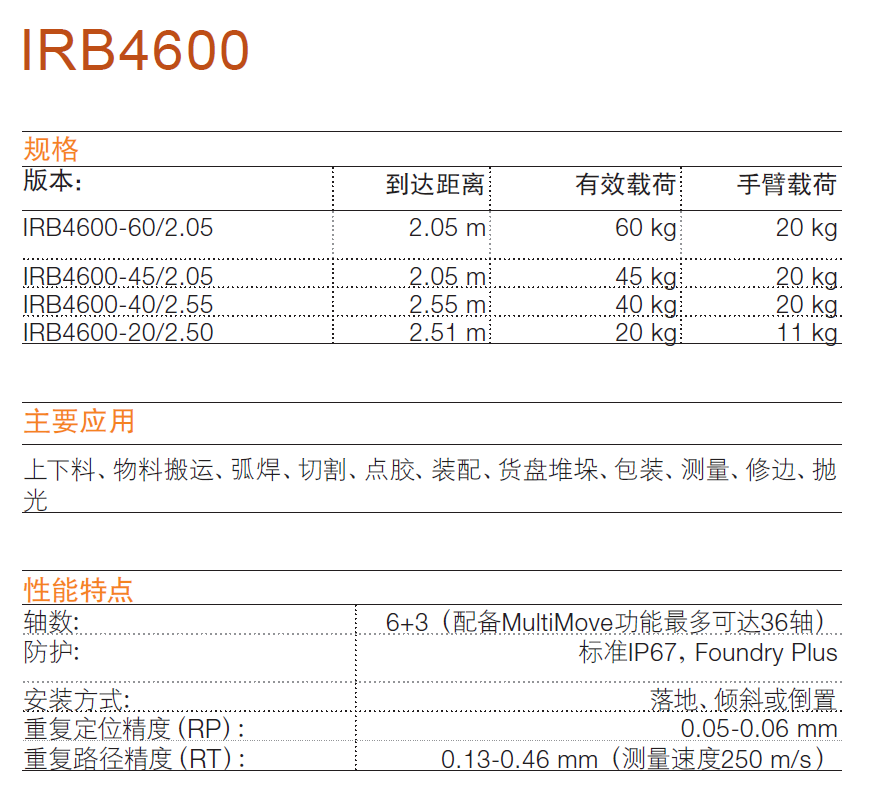
机器人重复位置精度(RP)的定义:对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度。
机器人重复路径精度(RT)的定义:对同一指令轨迹重复n次时实到轨迹的一致程度。
机器人重复位置精度(RP)和机器人重复路径精度(RT)定义的详细说明和试验方法请参见 GB/T 12642-2013 / ISO 9283:1998 工业机器人 性能规范及其试验方法
比如ABB IRB4600机器人的重复位置精度0.05·0.06mm,而重复路径精度0.13·0.46mm,重复路径精度还跟测量速度有关。
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:CAD画家 原文链接:https://www.cad2d3d.com/post-824.html




 针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理
针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理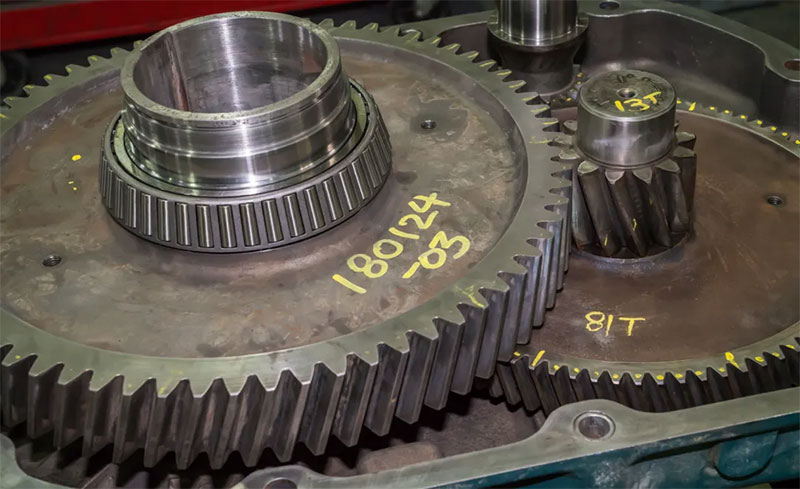 为什么齿数要设计为互质数!教材只告诉我结果,却没告诉我原因
为什么齿数要设计为互质数!教材只告诉我结果,却没告诉我原因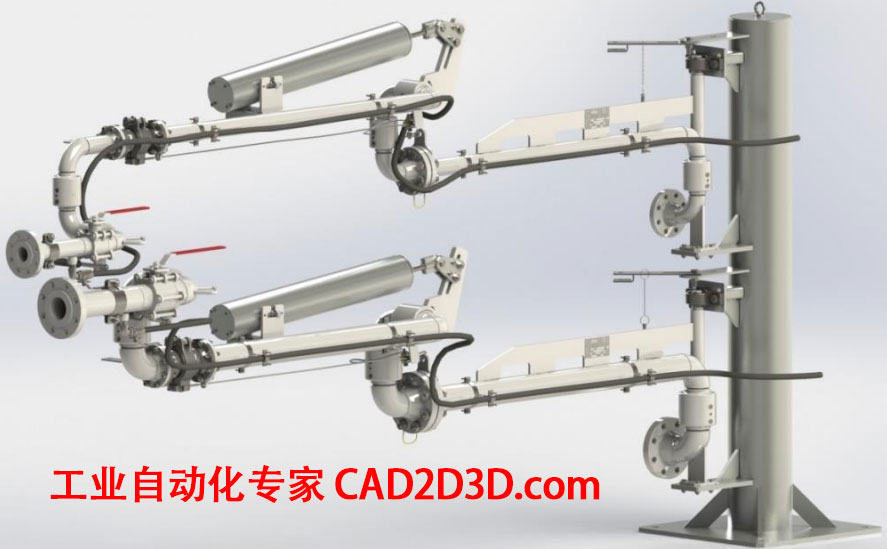 LPG(液化石油气)装车臂(鹤管)规格参数及外形尺寸
LPG(液化石油气)装车臂(鹤管)规格参数及外形尺寸 顶部装车鹤管,蒸汽伴热带管道保温层,带气相返回管,带防溢探头
顶部装车鹤管,蒸汽伴热带管道保温层,带气相返回管,带防溢探头