
不同国家标准对工业机器人位置重复精度 Position repeat accuracy 的定义不同,因此在机器人选型时,一定要在相同的标准下对比重复位置精度。
相关文章:工业机器人重复定位精度和重复路径精度的定义及区别联系:https://www.cad2d3d.com/post-824.html
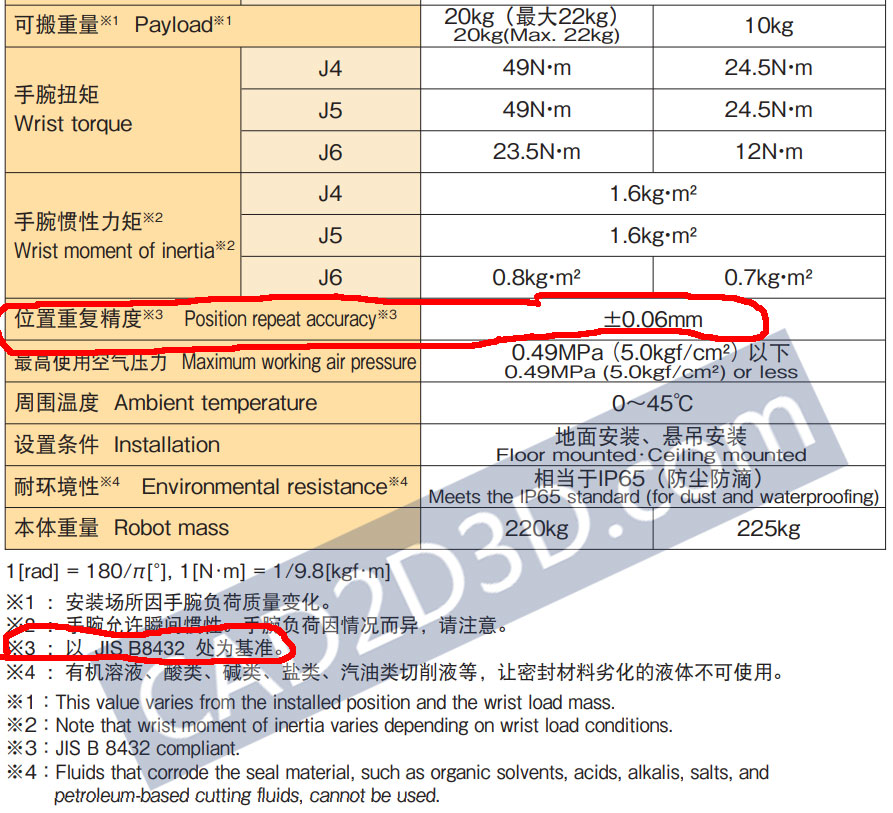
比如下图是那智(那智不二越)某款机器人参数表,位置重复精度一栏明确注明以JIS B432 处为准。
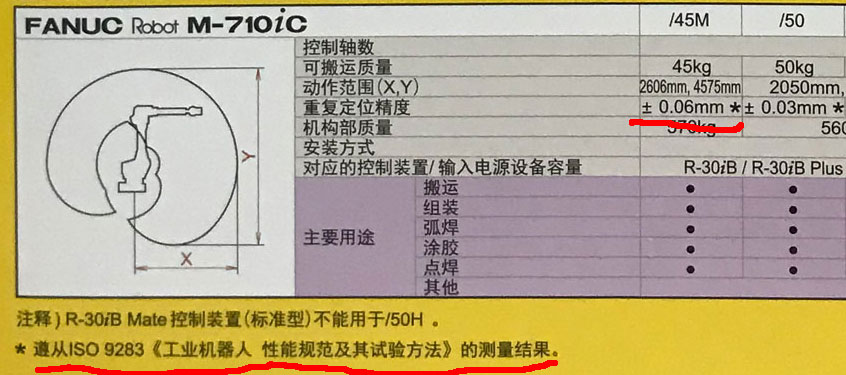
下面是FANUC 某款机器人参数表,重复定位精度一栏明确遵从 ISO 9283 《工业机器人 性能规范及实验方法》的测量结果。
标准说明及下载
1. 日本 JIS B8432-1999 操作型工业机器人.性能标准和相关的试验方法 (Manipulating industrial robots -- Performance criteria and related test methods)
百度网盘下载地址: https://pan.baidu.com/s/11MjgWJCLzh2iCNgZFkMVbg 提取码: 5cuq
2. 国际 ISO 9283 《工业机器人 性能规范及实验方法》
百度网盘下载地址:https://pan.baidu.com/s/10HCBXdsvPKotmzBZVQAxaQ 提取码: t3g2
3. 中国标准 GB/T 12642-2013 工业机器人 性能规范及其试验方法
百度网盘下载地址: https://pan.baidu.com/s/1z1IS51bCHFmfUMPWctMvTQ 提取码: 7qz2
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:江苏一棵树 原文链接:https://www.cad2d3d.com/post-944.html




 FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图
FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图 工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂
工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂