CAD2D3D
三维模型免费下载,用3D看世界,让自动化更简单
3D模型
最新发布
机械装置装备
机器人模型
起重吊装
物流转运
电气电子
手爪
主机设备
辅机设备
技术
最新发布
机器人方案大师
装车橇设计大师
机械原理
电气控制
机器人技术
视觉技术
自动化技术
机械制图
工业互联
检测与测量
公差分析
化工装备
标准规范
视频
软件
品牌
FANUC机器人手册
Free3DWorld
登录
← 返回总目录
FANUC Robot series R-30iB/R-30iB Mate 控制装置 iRvision 操作说明书
目录
前言
- 23
关于视觉系统
- 25
基本操作
- 30
相机
- 74
相机校准
- 80
视觉程序
- 101
命令行工具
- 201
应用固有的数据
- 425
从机器人启动
- 427
视觉应用画面
- 463
点阵板
- 486
其他选项功能
- 489
附录
- 511
索引
- 541
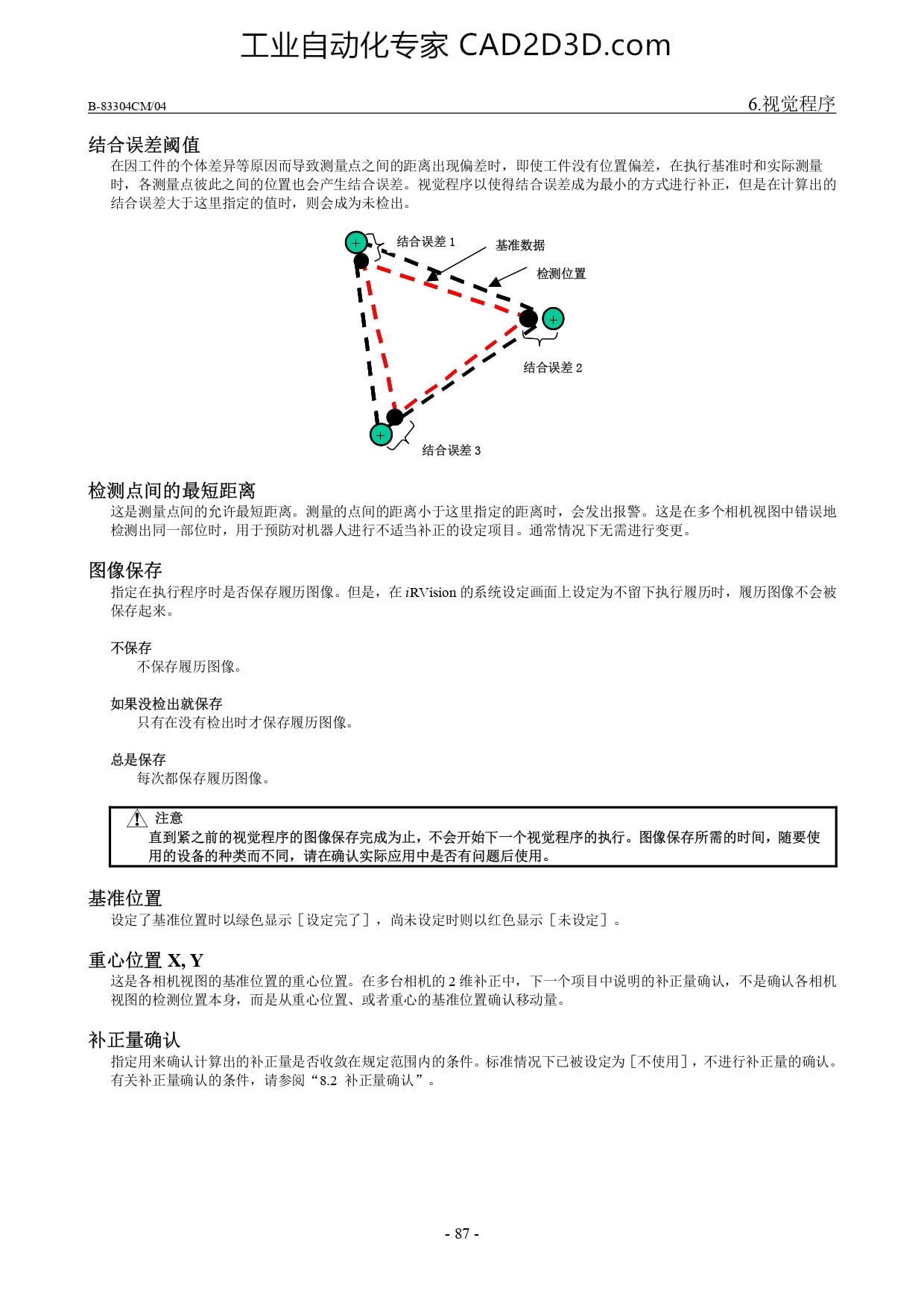
结合误差阈值、检测点间的最短距离、图像保存、基准位置、重心位置 X, Y、补正量确认
第 109 页 / 共 547 页
首页
上一页
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
下一页
末页
上一页
下一页