无序抓取—发现零件
#》 使 用 ISRA 自 己 的 算法
, 鲁 棒 性 高
, 完 美 适 用 于 IntelliPICK3D 相 机
的 特性
》 少量 的 调整 参数
”简单 快速 地 适应 应 用 程序
的 特定 需求
”简单 的 训练
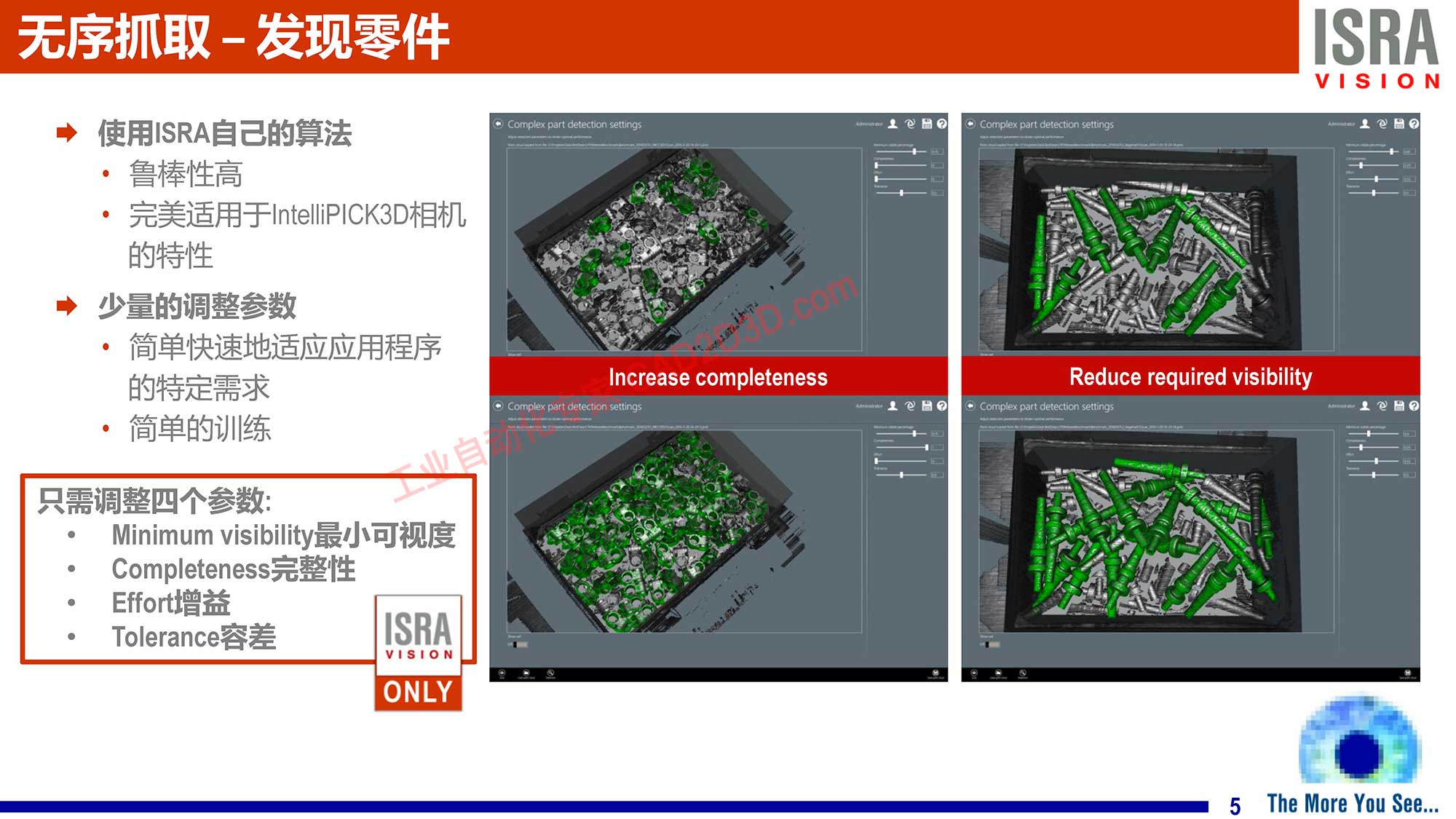
只 需 调 整 四 个 参数 :
。 Minimum visibility 最 小 可 视 度
。 Completeness 完 整 性
。 ”Effort 增 益
。 Tolerance 容 差 13 RA
5 The More You See...
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)