- 多台机器人协作实现自动搬运重量2.5吨长6米钢结构型材
- 游标卡尺测量力大小要求(卡紧零件时的压力)
- 工业相机视觉系统学习:外观(瑕疵)检测原理算法
- 工业相机视觉系统学习:彩色照相机的效果与预处理
- 工业相机视觉系统学习:照明光源选择
- 工业相机视觉系统学习:镜头选择
- 工业相机视觉系统学习:CCD(像素)与视觉系统的基础知识
- SMC产品目录 官方在线选型工具 无需注册 快速下载2D和3D图 smc3s.com
- 气缸及其配套设备附件的作用及其相互连接图
 T型螺钉巧妙利用矩形框圆角方角对角线长度不同实现防旋转功能的设计思路
T型螺钉巧妙利用矩形框圆角方角对角线长度不同实现防旋转功能的设计思路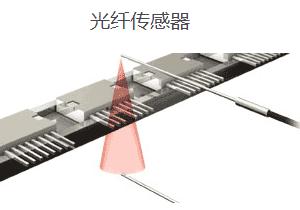 光纤传感器的检测原理、特点、类型分类
光纤传感器的检测原理、特点、类型分类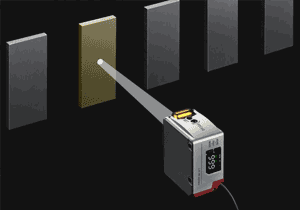 光电传感器的检测原理、特点、类型分类
光电传感器的检测原理、特点、类型分类 传感器按检测原理方式分类
传感器按检测原理方式分类- 工业相机视觉检测的基础知识:相机
- 工业视觉检测的基础知识:相机镜头
 工业相机视觉检测的基础知识:相机光源
工业相机视觉检测的基础知识:相机光源- 工业视觉检测的基础知识:颜色篇
- 视觉检测 分辨率、精度、公差的含义及区别联系 相机选型
- 日本 FANUC 发那科机器人行走轴单元(机器人地轨)
- SMC 常用气管接头及管子选型手册 PDF选型手册免费下载
- SMC真空元件选型方法(真空发生器、真空过滤器、真空吸盘) PDF选型手册免费下载
- SMC气缸选型方法 PDF选型手册免费下载
- PNP于NPN型传感器的原理与区别 (视频)
CAD画家3D模型免费下载,用3D看世界,让自动化更简单
CAD画家 提供工业自动化各种机械设备、自动化专机、电气控制装置等2D图纸/3D模型源文件下载。学习机械设计和电气控制等知识教程,分享新工艺、新技术、新产品,汇集自动化和电气控制行业专家,提供工业自动化行业整体技术解决方案。
