
与
工业视觉相机 相关商品:
查看所有与
工业视觉相机 相关商品 >>
 可旋转工业视觉相机安装支架LS12D1BXJ铝合金两用底座铝型材安装
可旋转工业视觉相机安装支架LS12D1BXJ铝合金两用底座铝型材安装  高清摄像头CCD1200线彩色电子目镜BNC/Q9口工业视觉相机检测镜头
高清摄像头CCD1200线彩色电子目镜BNC/Q9口工业视觉相机检测镜头  高画 画质摄影头CCD1200线 线彩色电子目镜BNC/Q9口工业视觉相机
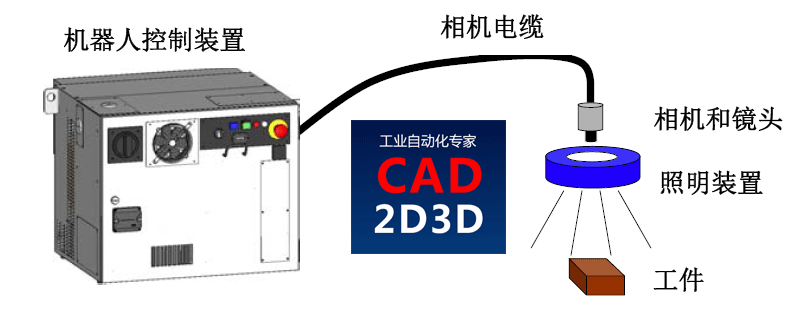
高画 画质摄影头CCD1200线 线彩色电子目镜BNC/Q9口工业视觉相机 视觉检测首先要根据图纸上的公差,以及客户的检测要求后,依据分辨率、精度等参数,选择满足要求的相机。
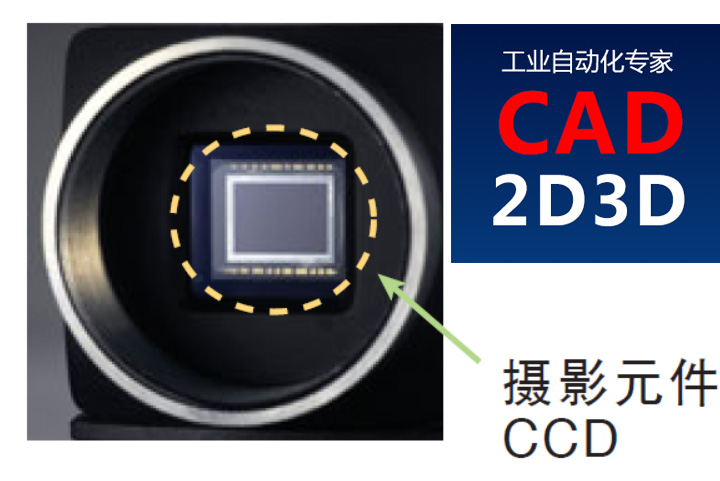
1. 分辨率(Resolution)

比如我要看的产品大小是30mm*10MM,使用200万像素(1600pixel*1200pixel)的相机。因为产品是长条形,为了把产品都放入到视野内,我们计算分辨率的时候要考虑长边对应,此时分辨率为

2. 精度(Accuracy)

精度的单位是mm。根据产品表面和照明状况的不同,我们可以通过放大图像观察辨别稳定像素的个数,从而得出精度。如果条件不允许实际测试观察,一般的规律是,如果使用正面打光,有效像素为1个,使用背光,有效像素为0.5个。这个例子我们取1 Pixel,得到精度为0.019mm约等于0.02mm。
3. 公差(Tolerance)
一般情况下,精度和公差的对应关系如下:
| 最小可检测尺寸= | 10倍精度(精度小一个数量级) | 本例公差带范围:0.2mm |
| 外观容差= | 4倍精度本例 | 最小可检测的瑕疵或者污点大小为0.08mm |
对一个项目来讲,我们是先从图纸上读到公差的要求。然后再根据上述关系,反推得出我们需要多少像素的相机。
| Camera Types | 1 Pixel Resoluiton | 3 Pixel Resoluiton | 5 Pixel Resoluiton | 10 Pixel Resoluiton |
| 21M pixel 5120×4096 | 0.006 mm | 0.018 mm | 0.029 mm | 0.059 mm |
| 5M pixel 2432×2050 | 0.012 mm | 0.037 mm | 0.062 mm | 0.123 mm |
| 2M pixel 1600×1200 | 0.019 mm | 0.056 mm | 0.094 mm | 0.188 mm |
| 0.3M Pixel 640×480 | 0.047 mm | 0.141 mm | 0.234 mm | 0.469 mm |
未完待续 ~
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1072
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1072.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案 气动控制阀手动操作机构内部构造,手动自动切换原理,读万卷书不如看一张图
气动控制阀手动操作机构内部构造,手动自动切换原理,读万卷书不如看一张图- 正经文章!差不多就行了,有必要画的这么逼真吗?
- SolidWorks官网,三维设计软件下载
 采用桁架机械手实现机床自动上下料,总之机械手性价比碾压机器人
采用桁架机械手实现机床自动上下料,总之机械手性价比碾压机器人- 工程师不看说明书,机器人买来直接干,连螺钉孔干什么用都不知道
- 埃博普(ABP)公司官网,专门从事感应熔化和加热设备生产制造
- 机加工自动化生产线方案设计大师,详细介绍生产线形式、料仓、物流转运、手爪、在线测量、工装夹具的结构形式和设计方法
- 方案大师:2.4.3 机器人、机械手、地轨、手爪等结构和原理详述
- 日本帕斯卡Pascal官网,专业的液压工装夹具制造商
更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
 发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载