
 自动化视觉检测设备机器视觉在线检测设备外观检测设备
自动化视觉检测设备机器视觉在线检测设备外观检测设备  小点规透明菲林卡尺裂缝划伤测量对比片污点外观检测尺寸卡规定制
小点规透明菲林卡尺裂缝划伤测量对比片污点外观检测尺寸卡规定制  奥斯微工业电子显微镜高清数码放大镜手机维修电子外观检测修表拍照测量高速高清HDMI接显示屏数码工业相
奥斯微工业电子显微镜高清数码放大镜手机维修电子外观检测修表拍照测量高速高清HDMI接显示屏数码工业相 1.0 瑕疵模式的原理
1.1 分割
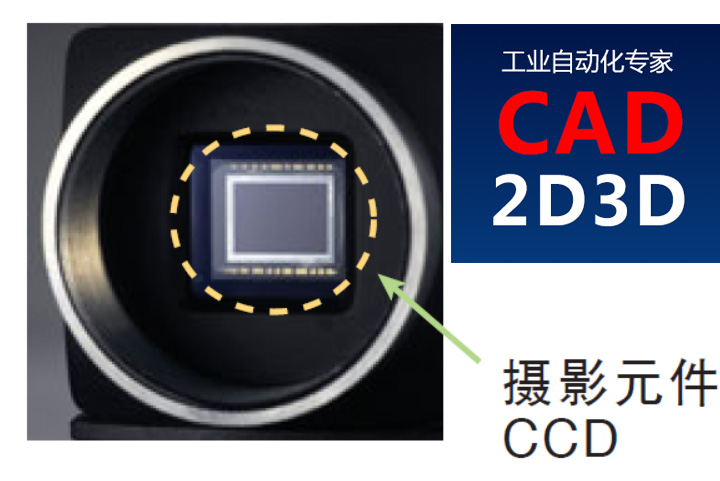
图像传感器利用摄像元件 CCD 的每个像素的浓度(明暗) 数据,根据浓度的变化来检测瑕疵或边缘部。考虑到处理全部像素数据所需时间过长,同时一些不必要的噪点数据会影响检查的结果,因此在本公司生产的 CV 系列中,采用由数个像素构成的小“分割”的平均浓度,通过与周围的平均浓度进行对比的方法来检测瑕疵。
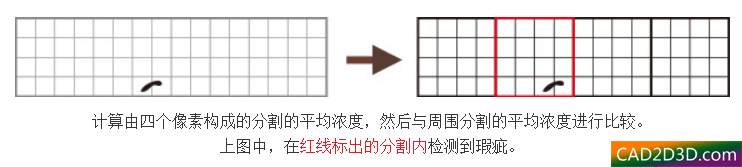
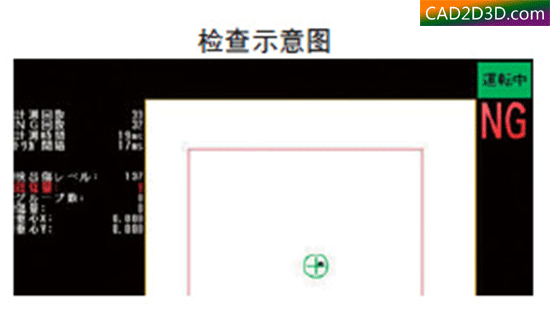
计算由四个像素构成的分割的平均浓度,然后与周围分割的平均浓度进行比较。
上图中,在红线标出的分割内检测到瑕疵。
1.2 瑕疵模式算法(各分割与周围分割进行比较和计算的方法)
下面介绍瑕疵测量模式的算法。
检测原理 (检测方向为X)
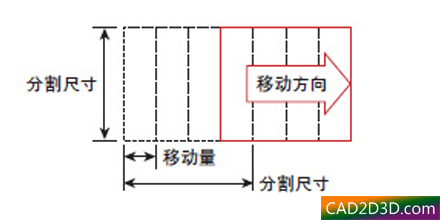
1. 在检测区域内,将任何尺寸的小区域(分割)移动其分割大小的 1/4 量的同时,进行平均浓度的测定。
2. 在包括当前分割(下图 95 的位置)在内的检测方向4 分割中,测量最大浓度和最小浓度。该值就是当前分割的瑕疵等级。
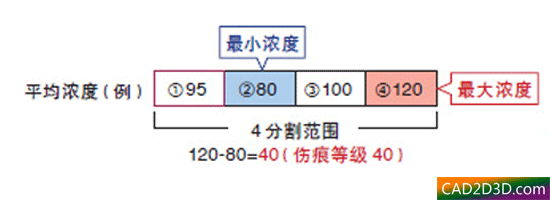
3. 瑕疵等级超过了设定临界值时,将该当前分割作为瑕疵进行计数。该计数值则作为"伤量"检查结果。

之后,在区域内每次以一定的移动量移动当前分割时重复以上(1)~(3)步骤。
指定检测方向为XY(二维)时的处理方法
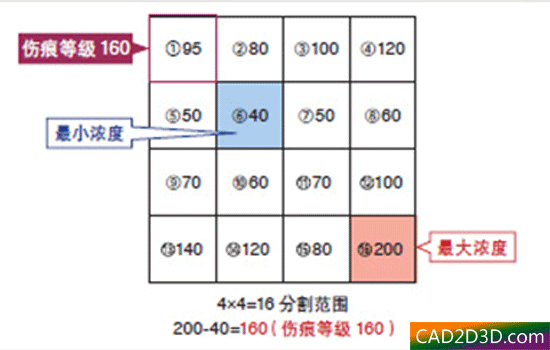
以XY为检测方向时,对于包括当前分割在内的 X、Y方向的各 4个分割(共计16个分割),计算最大浓度与最小浓度的差值。
通过比较周围 4 个分割 (而不仅是相邻 2 个分割) 的浓度,可以检测出微小的浓度变化( 瑕疵)。
1.3 瑕疵模式的原理 总结
瑕疵模式,是借助“段”这种由几个像素组成的小单位,与周围进行分段比较,将浓度变化点检测为瑕疵或污点的模式。通过分段处理,可以在降低干扰影响的同时实现高速性,通过将多个候选项与周围段进行比较,可使过去难以实现的对“微小瑕疵”、“轻薄污点”等的检测成为可能。
2.0 瑕疵模式的优化设置方法
2.1 最佳分割尺寸
下面介绍瑕疵检查的优化设置方法。
通过调整分割尺寸,可以优化检测敏感度及处理时间。
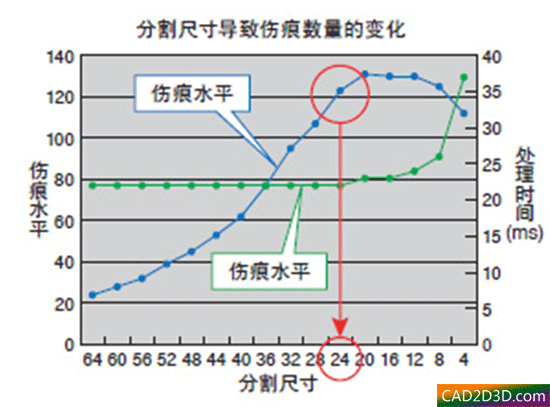
下表所示的试验结果表示的是分割尺寸不同时,瑕疵水平与处理时间之间的变化关系( CV-3000)。
分割尺寸与检测对象的尺寸基本相同时,瑕疵水平达到最大值。换言之,将分割尺寸设为实际检测对象(瑕疵)的尺寸(像素个数)是一种同时兼顾检测敏感度与处理时间的设置。
最佳分割尺寸=瑕疵大小(mm)×Y方向像素数量/Y方向视野(mm)
例如:瑕疵尺寸为 2mm、视野为120mm( 方形)、采用24万像素照相机(Y方向 480像素)。则:2×480÷120=分割尺寸8像素。
2.2 适于图像的分割移动量/ 比较间隔的设置
瑕疵模式的两个参数——移动量及比较间隔可以决定进行浓度比较时的分割移动距离。
通过调整这些参数,可以更好地检测“ 小尺寸瑕疵”、“ 颜色较浅的污迹”等有特点的瑕疵·污迹。
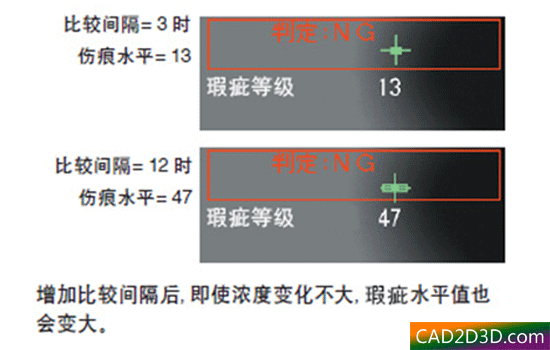
检测小尺寸瑕疵时,应该将移动量及比较间隔均设为较小的值,以便进行细致比较。
检测颜色较浅的污迹时,需要将移动量及比较间隔均设为较大的值,以便在更大的范围内进行比较。
总之,为了得到良好的检测效果,应该根据瑕疵·污迹的种类进行适当的设置。
2.3 瑕疵模式最佳设定方法 总结
通过调整最佳段大小和移动量/比较间隔设定,实现目标物的检测最佳化。最佳设定,就是将段大小设定为和瑕疵/污点同样的大小,并根据瑕疵/污点的大小和浓度,设定移动量和比较间隔。
3.0 圆周方向瑕疵检查的原理
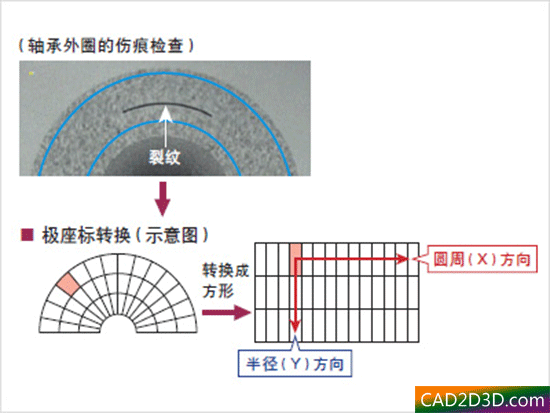
对于 PET 瓶、轴承、O圈等圆形的工件,应根据其曲线的外形制定适宜的外观检查方法。
这里,我们采用了利用程序进行“极座标转换”的方法。
将圆弧形的窗口(检查区域)转换成方形,通过对比圆周及半径方向上的分割浓度来检测瑕疵。
4.0 通过预处理提高瑕疵模式的使用效果
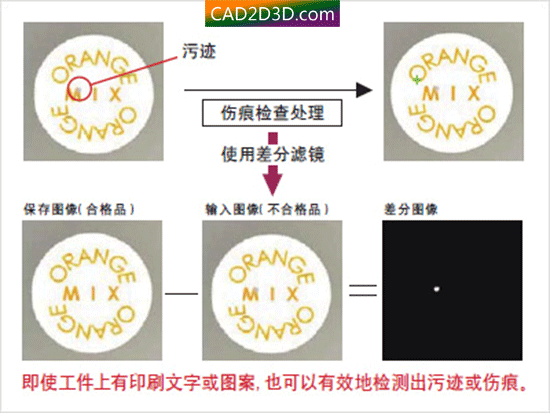
4.1 差分滤镜:忽略印刷部分,只检查污迹
如果没有标准,只是测量浓淡变化值,则难以区分污迹和印 刷文字。其结果往往是将清晰的印刷文字(而不是较浅的污迹)作为瑕疵或污迹检测出来。
通过保存合格品图像,进行每次输入图像及差分预处理,可以对于作为差分保留下来的图像进行256 级平均浓度比较。这样,即使工件上有复杂的印刷文字或图案,也可以检测出污迹或瑕疵。
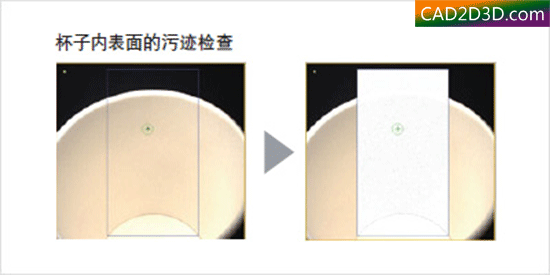
4.2实时差分滤镜
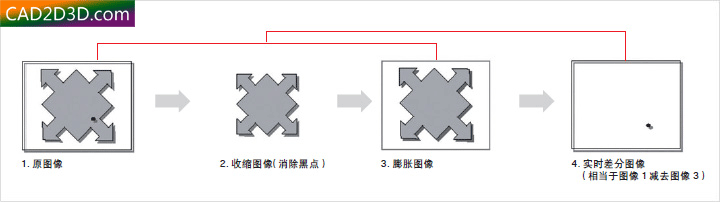
该滤镜可以通过提取原图像与原图像经过膨胀收缩滤镜处理后的图像之间的差分,从而检测出极小的黑点等缺陷之处。利用该滤镜时,可以免去根据形状复杂的对象物体的轮廓进行的区域设置,也不需要进行对象物体的位置修正,因此设置更简单。
4.3 实时差分滤镜的原理
4.4 外观检测/瑕疵模式 总结
要最大程度发挥瑕疵模式的作用,请牢记以下3点。
- 根据需要检测的瑕疵大小,设定段大小
- 根据瑕疵的大小及浓度,设定移动量/比较间隔
- 根据工件的形状,组合预处理设定
最后,对于视觉系统而言,拍摄清晰的图像很重要。
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1090
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1090.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 LNG 罐箱(罐式集装箱) P&ID、阀门清单、3D效果图、实物图和装卸方法
LNG 罐箱(罐式集装箱) P&ID、阀门清单、3D效果图、实物图和装卸方法- 一级建造师证书是我这辈子考的最有用的证书!指望工资涨1000元比登天还难,而靠一建证书补贴却轻而易举
- 液化石油气供应工程设计规范 GB 51142 重点条款 摘抄学习,流速可取0.8m/s~1.4m/s,管道与设备、阀门等可采用法兰连接或螺纹连接
- 意大利MIB公司官网,石油和天然气管道连接装卸供应商,装卸臂、船船加注、氢能科技
- 日本不二(福集莱泰庫斯)公司官网,专注缓冲器、医疗器械等
- 各种类型的阀门英文翻译,截止阀翻译为 Globe Valve,球阀翻译为Ball Valve
- 机器人拖链实际形状,中间段会耷拉下来,需设置支撑托板
 滚筒(辊筒)输送机输送速度范围,如何计算输送速度、减速比等
滚筒(辊筒)输送机输送速度范围,如何计算输送速度、减速比等- 工厂自动化零件供应商大全
 质量管理体系 GB/T19000/ISO9000 标准详解及下载
质量管理体系 GB/T19000/ISO9000 标准详解及下载
更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
 发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载