
与
视觉相机 相关商品:
查看所有与
视觉相机 相关商品 >>
 可旋转工业视觉相机安装支架LS12D1BXJ铝合金两用底座铝型材安装
可旋转工业视觉相机安装支架LS12D1BXJ铝合金两用底座铝型材安装  工业视觉相机固定夹具万向支架 CCD摄像头实验测试检测台升降架子
工业视觉相机固定夹具万向支架 CCD摄像头实验测试检测台升降架子  工业视觉相机固定夹具万向支架 CCD摄像头实验测试检测台升降架子
工业视觉相机固定夹具万向支架 CCD摄像头实验测试检测台升降架子 3D视觉技术,投射结构光到工件表面,相机拍照,生成工件的点云数据,自动识别工件位置,引导机器人准确抓取。

视频地址:https://mp.weixin.qq.com/s/xzfpZqJFZrqdjk_EwXX72w
未完待续 ~
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1352
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1352.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
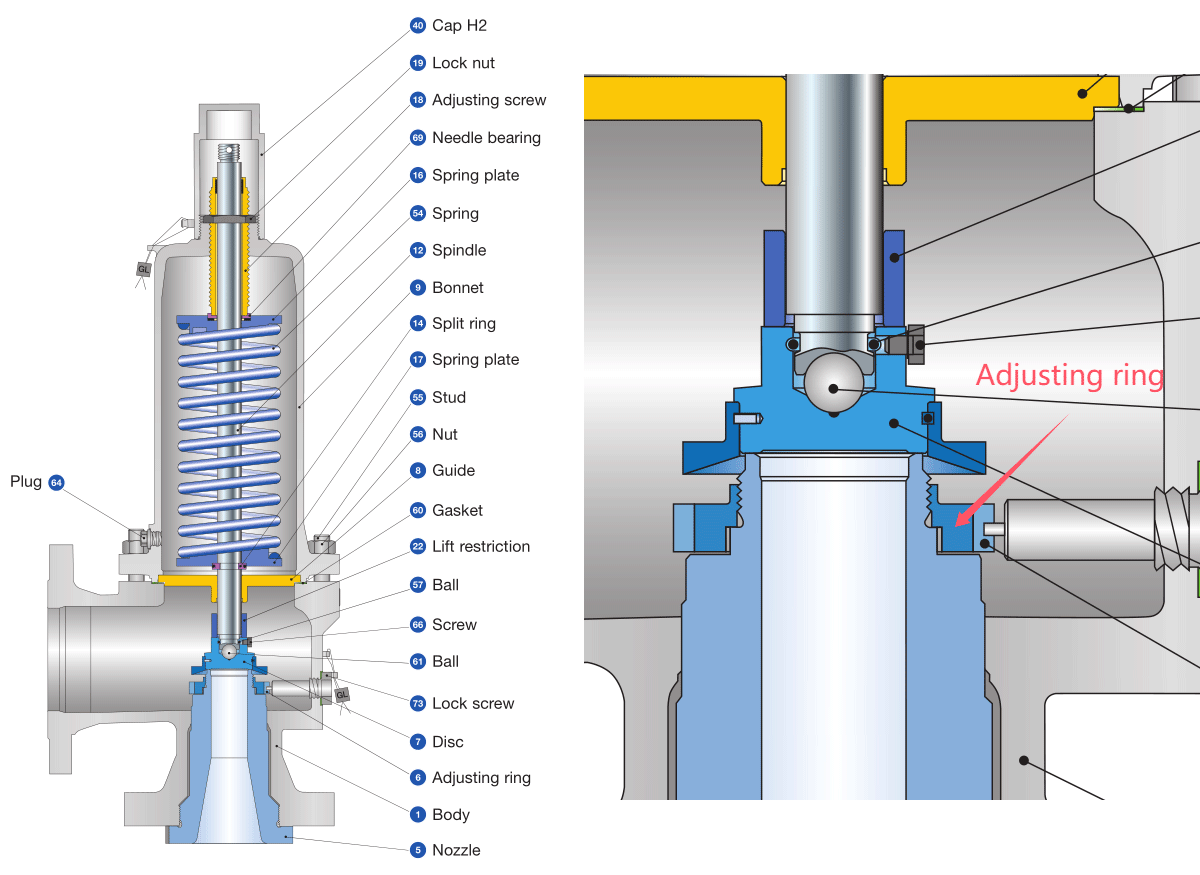 德国莱斯安全阀调节环设计、功能和作用详述,Adjusting Ring of Safety Valves
德国莱斯安全阀调节环设计、功能和作用详述,Adjusting Ring of Safety Valves- 看完机器人的零部件品牌构成后,突然感觉工业机器人也没什么技术含量了
- 以柔克刚!割草机居然是用软线来割草的,机械的世界就是这么神奇
- 方案大师:1.4 工业机器人的选型方法
- 老外设计的砂型自动组芯生产线,和我大学金工实习的场景不一样啊
- 英国雷尼绍Renishaw公司官网,是高精度测量和医疗技术领域的跨国公司
 链条玩出新花样,连续式链条提升机,利用两根链条实现同步提升
链条玩出新花样,连续式链条提升机,利用两根链条实现同步提升 大开眼界,机器人456轴内部结构,56轴变向同步带传动
大开眼界,机器人456轴内部结构,56轴变向同步带传动- 2D视觉识别工件种类,采用大景深的相机,可以满足1米高度差
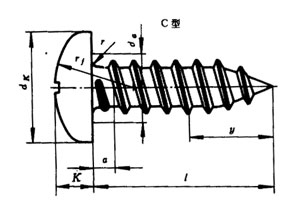 自攻螺钉系列标准及结构原理和规格型号说明
自攻螺钉系列标准及结构原理和规格型号说明
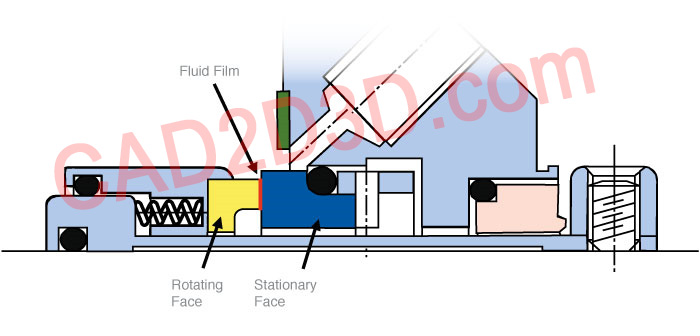 泵机械密封内部构造及运行原理
泵机械密封内部构造及运行原理
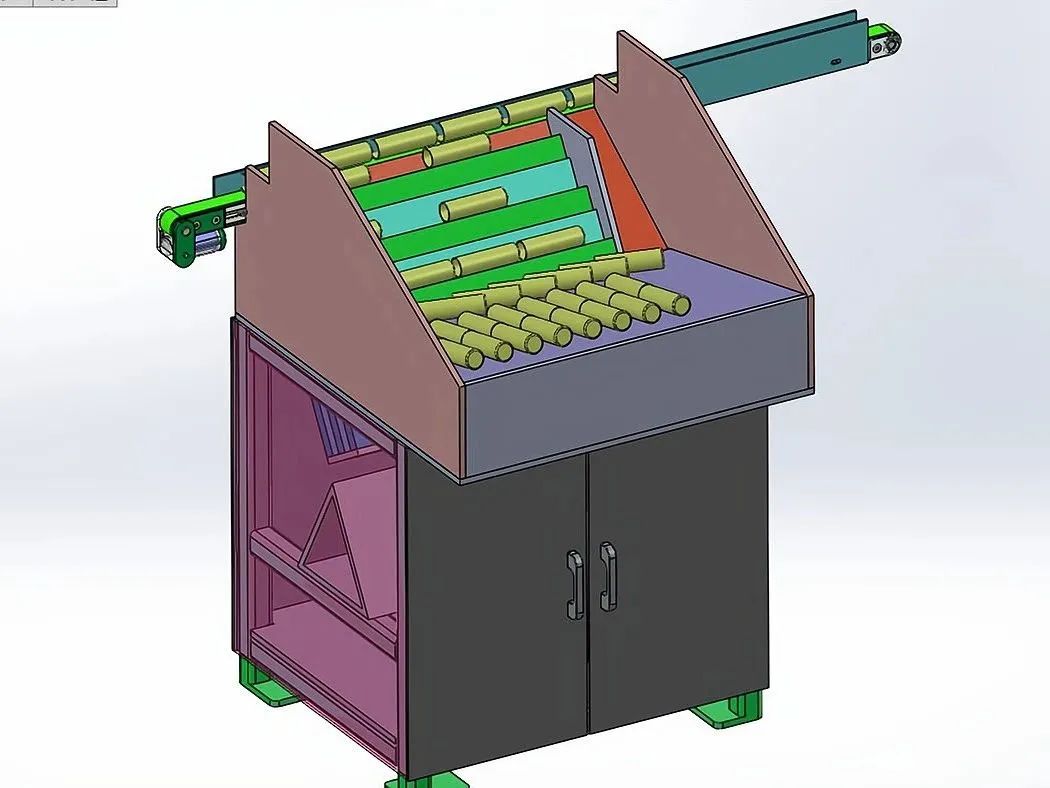 干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
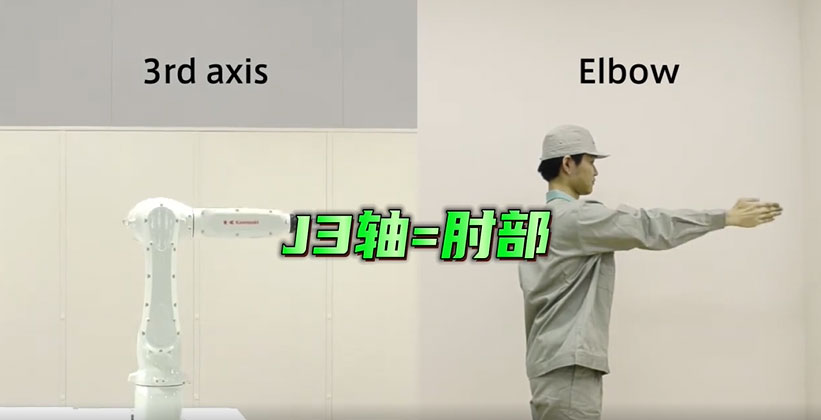 不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
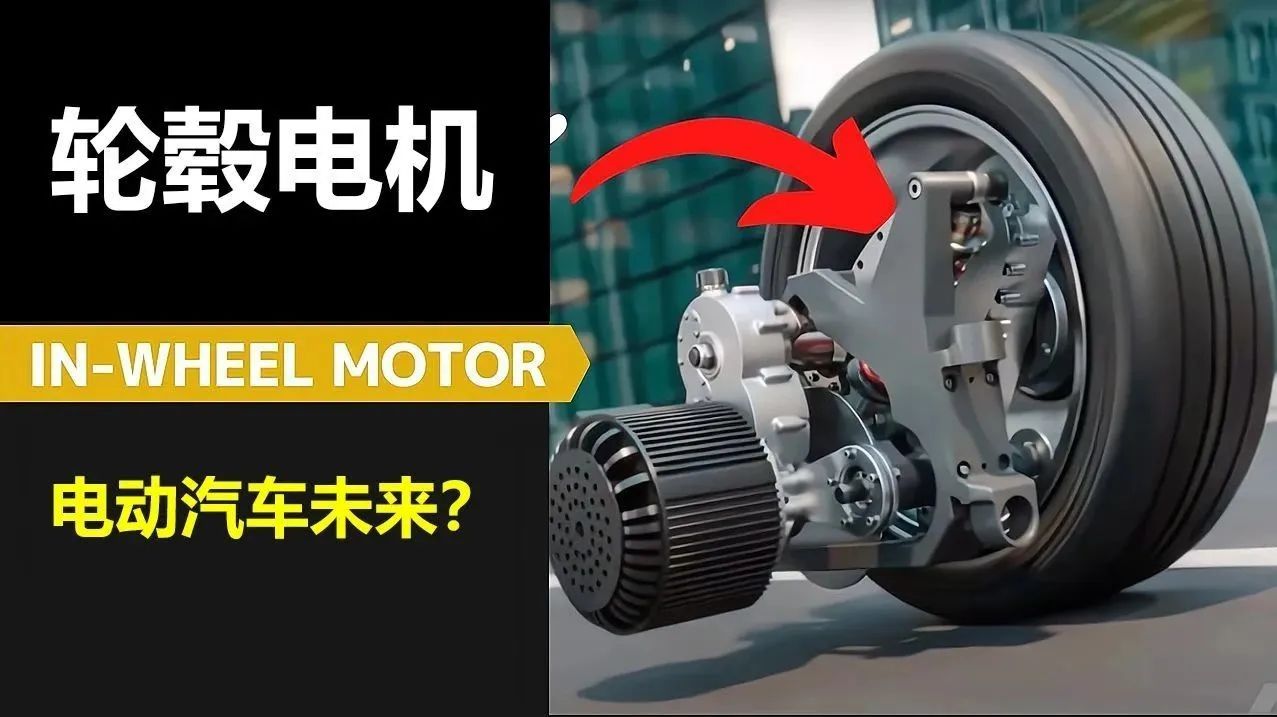 干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
 两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
 国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
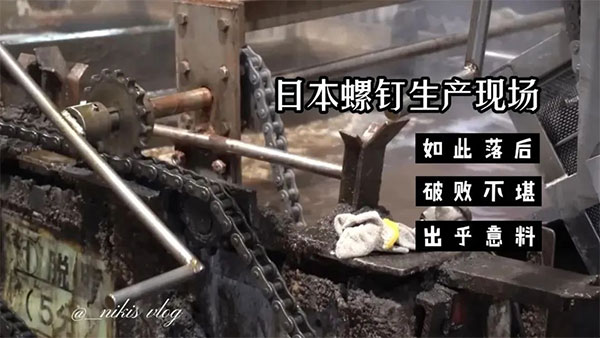 日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
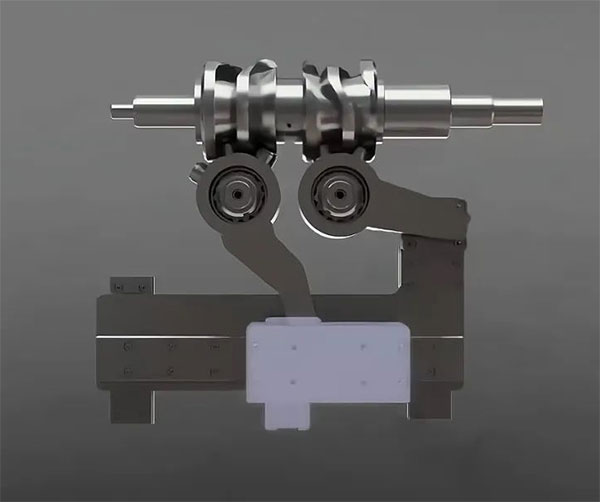 纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载