
与
视觉相机 相关商品:
查看所有与
视觉相机 相关商品 >>
 海康机器人工业相机彩色镜头全局卷帘快门视觉高速面阵相机高清
海康机器人工业相机彩色镜头全局卷帘快门视觉高速面阵相机高清  亚博智能 奥比中光Gemini 335/336L双目结构光深度相机SLAM小车AI视觉摄像头户外抗强
亚博智能 奥比中光Gemini 335/336L双目结构光深度相机SLAM小车AI视觉摄像头户外抗强  海康机器人HIKROBOT感知双目深度相机三维3D高精视觉RGB-D镜头体感智能摄像头AGV导航避障
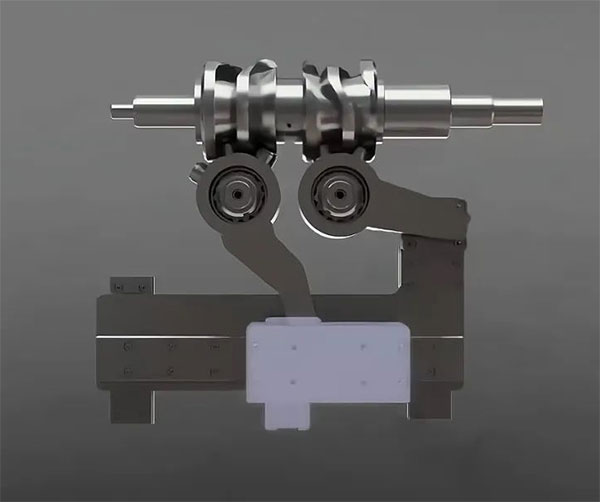
海康机器人HIKROBOT感知双目深度相机三维3D高精视觉RGB-D镜头体感智能摄像头AGV导航避障 3D视觉技术,投射结构光到工件表面,相机拍照,生成工件的点云数据,自动识别工件位置,引导机器人准确抓取。

视频地址:https://mp.weixin.qq.com/s/xzfpZqJFZrqdjk_EwXX72w
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1352.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 导轨安装打表保证平行度,工匠无可替代
导轨安装打表保证平行度,工匠无可替代- 视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
- 真巧妙!角度放大机构你见过吗?挖掘机也有大学问
- 美国米勒阀门与控制公司官网(Miller Valve & Controls),主营高性能控制阀
- Wafer Type Butterfly Valve 对夹式蝶阀 API609
- 闸阀内部构造、组成、优缺点及选型方法
- 台湾气立 CHELIC 官网,专注工业4.0、空压元件、机械夹、自动化元件的综合制造商
- 设计师又开始闭门造车了,连扳手都没摸过的人能做好设计吗?
- 方案大师 第3.8节:机器人打磨去毛刺方案设计
- 德国德马吉森精机DMG MORI官网,是车削中心和铣削加工中心的全球领导者
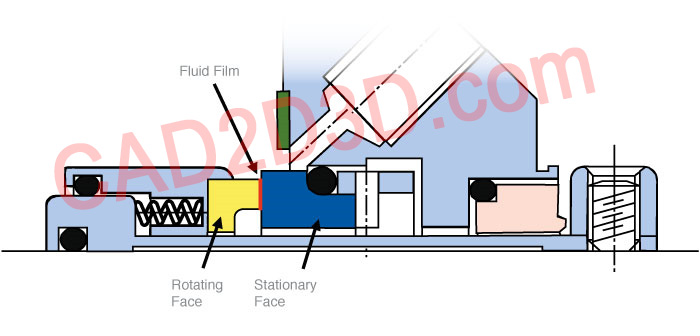 泵机械密封内部构造及运行原理
泵机械密封内部构造及运行原理
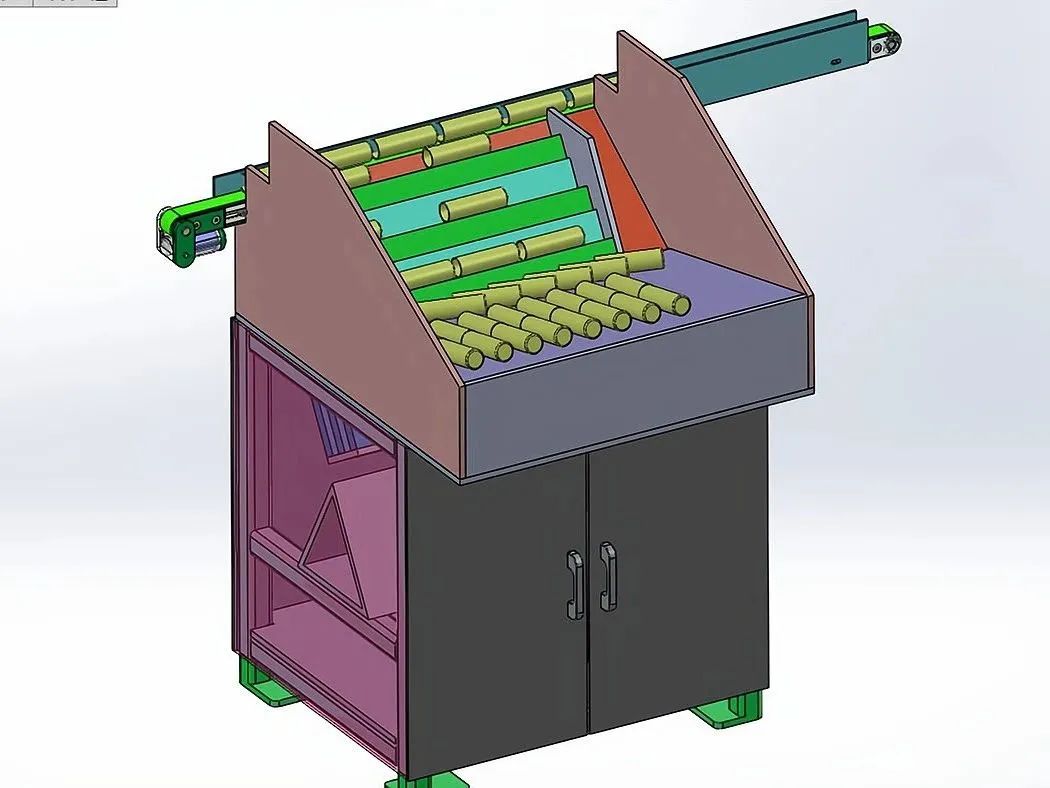 干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
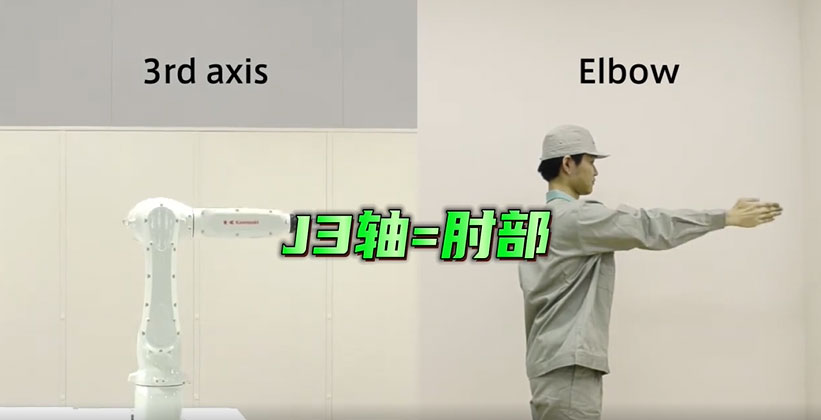 不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
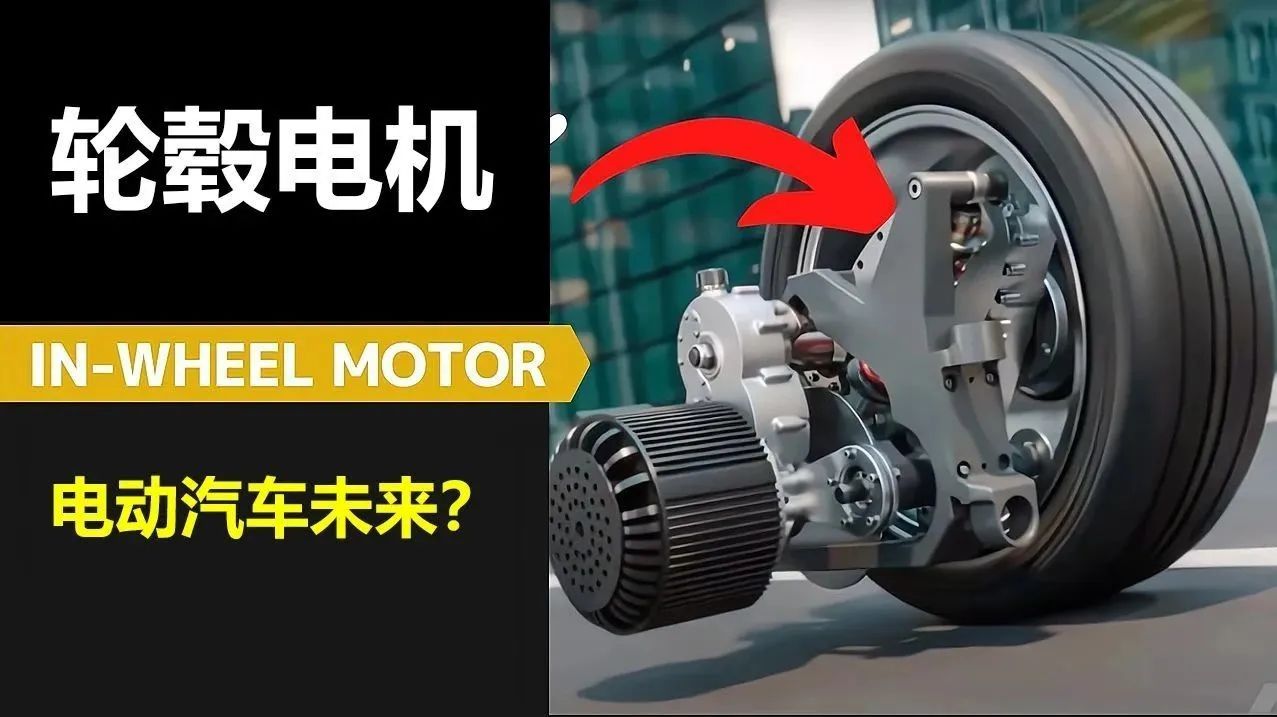 干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
 两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
 国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
 日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
 纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载