
IGV(Intelligent Guided Vehicle)即智能引导车 是一种采用激光雷达(LiDAR)实现自主导航的通用移动机器人。IGV能够通过雷达的读数来推断其所在位置,并与数据库中的拟定运行路径的周围环境图像信息进行比较,从而确定当前位置及对下一步的运行路线做出决策。

IGV采取的自然导航方式是目前国内外主流先进的导航方式,针对目前定位难、导航环境复杂等问题给出了新的解决方案。
1. 定位难点
针对工厂内部环境、路线、工艺流程多变的实际情况,IGV小车运行中实时性数据更新和周围环境信息库的搭建一直是技术上的一个难题。博众自然导航方式的优势就在于此,完全不需要铺设外界参照物,行驶路径灵活可变,信息集成化程度高,因此在实际场景应用中可以获得最佳的柔性导向。
2. 兼容多种导航方式(激光+GPS+视觉)
通常情况下,针对动态变化较大以至于难以通过激光雷达定位的场景,博众提供“视觉辅助定位”解决方案,可以利用指向地面的摄像头识别二维码标签,定位 IGV 小车。产品多数适用于物体频繁移动以至于无法建立数字地图的场景,或激光雷达视野受到阻挡的场景。
3. 精准定位要求
对于需要达到较高定位精度的场景,尤其在电子行业中,定位精度一直是应用的重难点,通常±5mm已经是大多数AGV企业的最高水准。IGV提供“精确定位”解决方案,可以利用激光雷达识别特定的几何、光学特征,或利用指向地面的摄像头识别二维码标签,引导机器人实现最高±1mm 的对接精度。
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:江苏一棵树 原文链接:https://www.cad2d3d.com/post-981.html




 针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理
针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理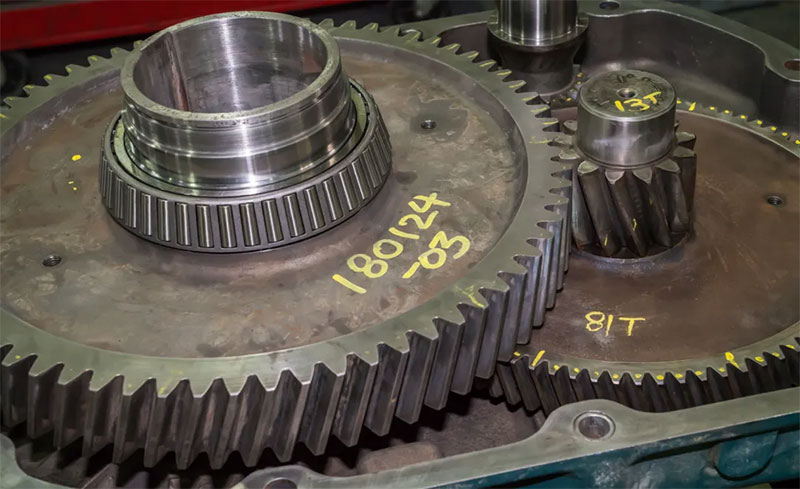 为什么齿数要设计为互质数!教材只告诉我结果,却没告诉我原因
为什么齿数要设计为互质数!教材只告诉我结果,却没告诉我原因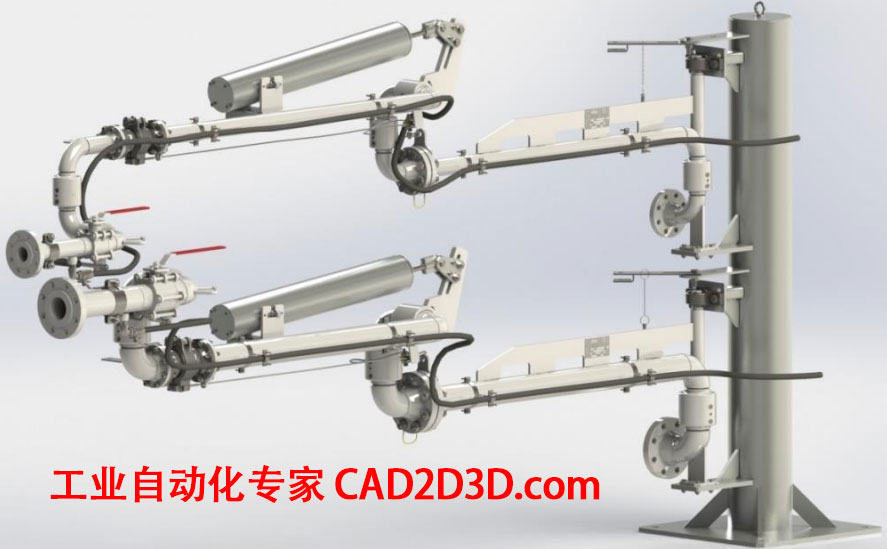 LPG(液化石油气)装车臂(鹤管)规格参数及外形尺寸
LPG(液化石油气)装车臂(鹤管)规格参数及外形尺寸 顶部装车鹤管,蒸汽伴热带管道保温层,带气相返回管,带防溢探头
顶部装车鹤管,蒸汽伴热带管道保温层,带气相返回管,带防溢探头