
 官网正版 液压缸手册 唐颖达 产品图样 管嘴出流 缝隙流动 设计标准 技术要求 制造禁忌 试验方法
官网正版 液压缸手册 唐颖达 产品图样 管嘴出流 缝隙流动 设计标准 技术要求 制造禁忌 试验方法  液压缸手册 唐颖达+液压缸密封技术及其应用 液压缸设计与制造产品图样液压机装置选型设计工艺技术液压机
液压缸手册 唐颖达+液压缸密封技术及其应用 液压缸设计与制造产品图样液压机装置选型设计工艺技术液压机  白话液驱电控张海平 液压电控 液驱电控相关知识 液压工程师 电脉冲 开关控制 电比例阀开环控制 液压
白话液驱电控张海平 液压电控 液驱电控相关知识 液压工程师 电脉冲 开关控制 电比例阀开环控制 液压 IGV(Intelligent Guided Vehicle)即智能引导车 是一种采用激光雷达(LiDAR)实现自主导航的通用移动机器人。IGV能够通过雷达的读数来推断其所在位置,并与数据库中的拟定运行路径的周围环境图像信息进行比较,从而确定当前位置及对下一步的运行路线做出决策。

IGV采取的自然导航方式是目前国内外主流先进的导航方式,针对目前定位难、导航环境复杂等问题给出了新的解决方案。
1. 定位难点
针对工厂内部环境、路线、工艺流程多变的实际情况,IGV小车运行中实时性数据更新和周围环境信息库的搭建一直是技术上的一个难题。博众自然导航方式的优势就在于此,完全不需要铺设外界参照物,行驶路径灵活可变,信息集成化程度高,因此在实际场景应用中可以获得最佳的柔性导向。
2. 兼容多种导航方式(激光+GPS+视觉)
通常情况下,针对动态变化较大以至于难以通过激光雷达定位的场景,博众提供“视觉辅助定位”解决方案,可以利用指向地面的摄像头识别二维码标签,定位 IGV 小车。产品多数适用于物体频繁移动以至于无法建立数字地图的场景,或激光雷达视野受到阻挡的场景。
3. 精准定位要求
对于需要达到较高定位精度的场景,尤其在电子行业中,定位精度一直是应用的重难点,通常±5mm已经是大多数AGV企业的最高水准。IGV提供“精确定位”解决方案,可以利用激光雷达识别特定的几何、光学特征,或利用指向地面的摄像头识别二维码标签,引导机器人实现最高±1mm 的对接精度。
转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-981.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 国产CPU芯片底层指令集需要软银ARM公司授权,会不会被日本卡脖子?
国产CPU芯片底层指令集需要软银ARM公司授权,会不会被日本卡脖子? 依靠两个车轮分离组合实现三轮车和两轮车的转换
依靠两个车轮分离组合实现三轮车和两轮车的转换 激光除锈(清洗)技术的应用案例
激光除锈(清洗)技术的应用案例更多最新发布: 技术教程
-
 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
-
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
-
中间介质气化器 IFV(Intermediate Fluid Vaporizer)运行原理、内部构造和高清实物图
-
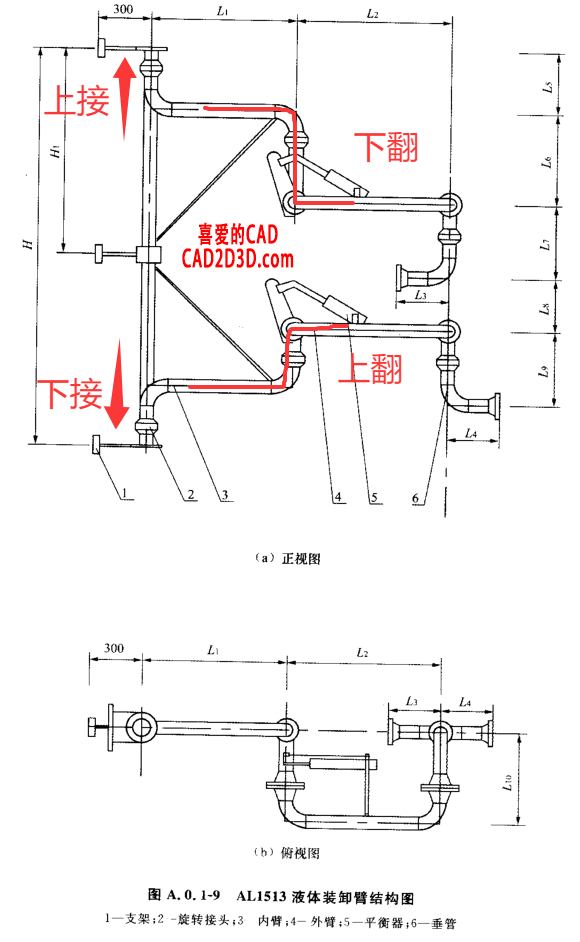 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
-
标准中的 必须、严禁、应、不应、不得、宜、不宜、可 的用词说明
-
SH∕T 3221-2023 石油化工物料汽车装卸设施设计标准有关装卸速度(流速)的要求
-
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
-
GB 50093 自动化仪表工程施工及质量验收规范 温度、压力取源部件安装规定、条文解释说明及案例解析
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载