
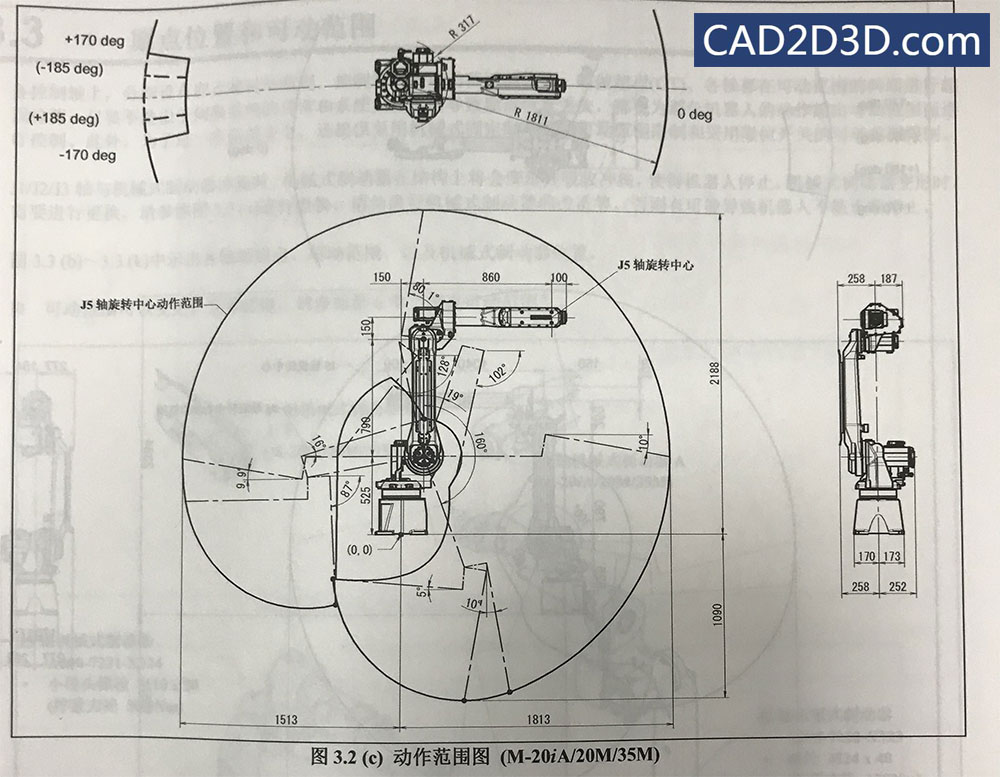
机器人运动半径是以J5轴旋转中心为基准的,而J5轴旋转中心至机器人末端TCP点还有一定距离,根绝实际机器人姿势,机器人实际可达到的范围是大于规格书上写明的。
为什么机器人运动半斤要以J5轴旋转中心为基准呢?
以J5轴旋转中心为基准的机器人运动范围内,机器人末端可以达到范围内任意一点、任意一个角度。
点击下图看大图
留言说明对本文有疑问的,请关注本站公众号 CAD画家,直接在公众号内留言即可。

转载请注明文章作者:江苏一棵树 原文链接:https://www.cad2d3d.com/post-932.html




 FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图
FANUC Robot 200iB 机器人技术规格书下载,运动半径、负载和外形图 工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂
工业机器人的前世今生,其部件组成和运动方式竟然100%模仿人类手臂