
与
工装夹具 相关商品:
查看所有与
工装夹具 相关商品 >>
 多工位铜公夹具cnc多工位平口钳加工中心工装夹具电脑锣电极夹具
多工位铜公夹具cnc多工位平口钳加工中心工装夹具电脑锣电极夹具  自定心虎钳配件左旋右旋正反牙精密螺杆工装夹具台钳子附件定位器
自定心虎钳配件左旋右旋正反牙精密螺杆工装夹具台钳子附件定位器  自定心虎钳erowa铣床平口钳台钳配件加工中心工装cnc五轴同心夹具
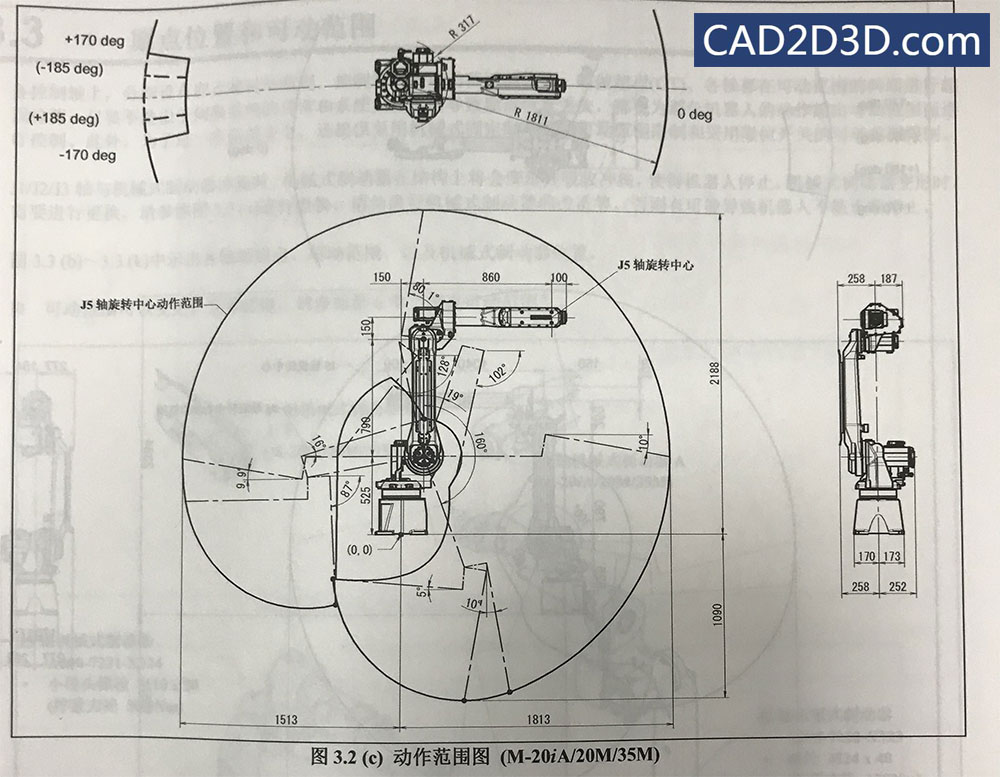
自定心虎钳erowa铣床平口钳台钳配件加工中心工装cnc五轴同心夹具 机器人运动半径是以J5轴旋转中心为基准的,而J5轴旋转中心至机器人末端TCP点还有一定距离,根绝实际机器人姿势,机器人实际可达到的范围是大于规格书上写明的。
为什么机器人运动半斤要以J5轴旋转中心为基准呢?
以J5轴旋转中心为基准的机器人运动范围内,机器人末端可以达到范围内任意一点、任意一个角度。
点击下图看大图
转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-932.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 LNG 罐箱(罐式集装箱) P&ID、阀门清单、3D效果图、实物图和装卸方法
LNG 罐箱(罐式集装箱) P&ID、阀门清单、3D效果图、实物图和装卸方法 紧固件大全,紧固件中英文名称对照,紧固件实物图
紧固件大全,紧固件中英文名称对照,紧固件实物图 《装车橇设计大师》教材发布,压力元件组合装置设计方法,石油化工行业技术人员必备
《装车橇设计大师》教材发布,压力元件组合装置设计方法,石油化工行业技术人员必备 日本发明的永不松动螺母,利用古老的楔形增力原理实现防松
日本发明的永不松动螺母,利用古老的楔形增力原理实现防松 依靠改变振幅进行重量调整的机构
依靠改变振幅进行重量调整的机构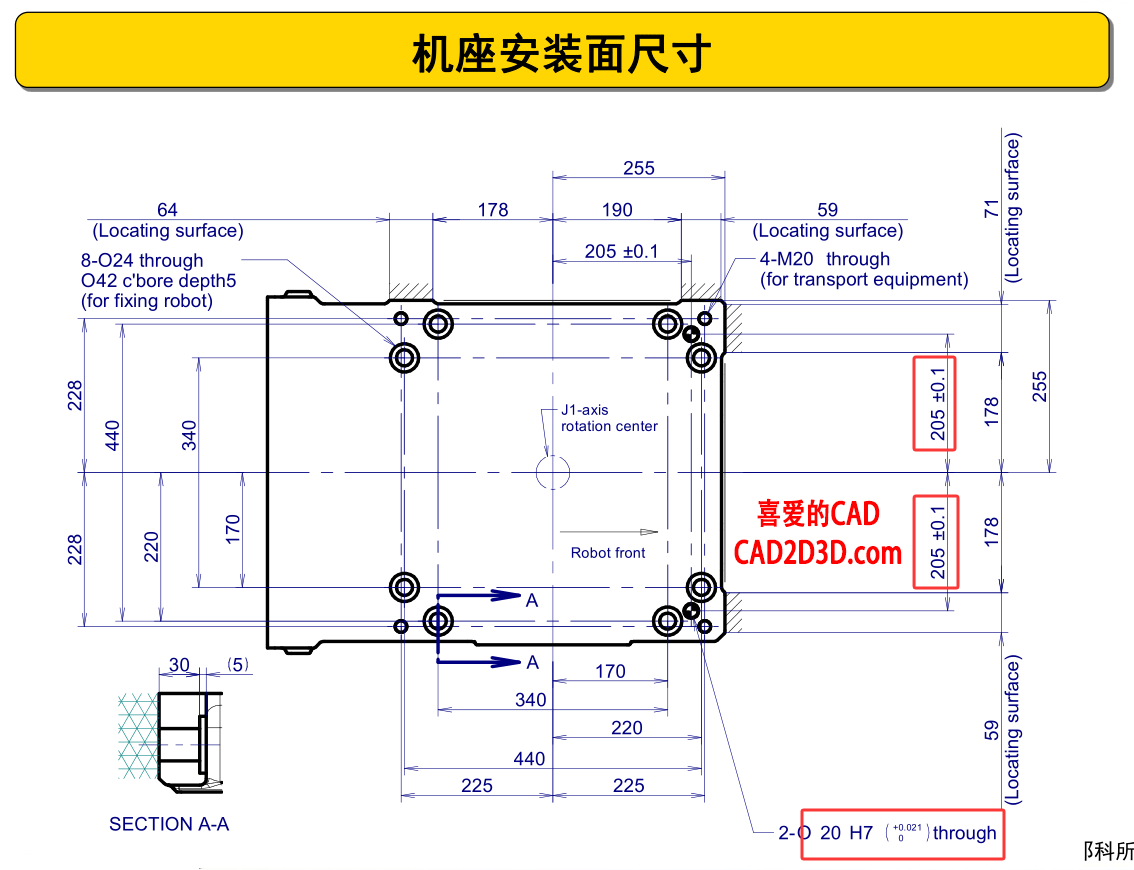 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载