
 防爆型数显单晶硅差压变送器压力变送器高精度传感器4-20mAHART
防爆型数显单晶硅差压变送器压力变送器高精度传感器4-20mAHART  丰控高精度工业温湿度计显示屏传感变送器控制仪电子看板声光报警
丰控高精度工业温湿度计显示屏传感变送器控制仪电子看板声光报警  投入式液位变送器一体式液位传感器探头4-20ma静压式水位控制器
投入式液位变送器一体式液位传感器探头4-20ma静压式水位控制器 人体是最美的,也是最合理的,关节旋转是最合理的运动机构。
机器人都是仿人类的,其结构和人体结构相似,都是通过多关节旋转来实现特定运动。
工业机器人由于用途简单,只需要模仿人类的手臂即可,像工业上常见的6轴关节型机器人和人类手臂的功能是一模一样。
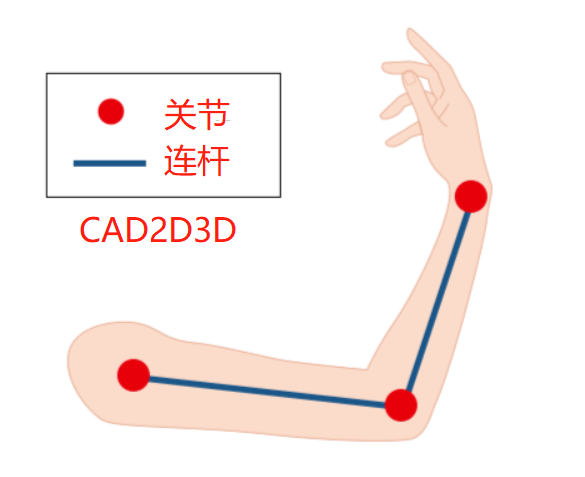
图1 人类手臂关节示意图
根据机器人关节连接的排列方式,机器人大致分为串联机器人和并联机器人。人类手臂就属于串联,四肢爬行动物类似于并联。
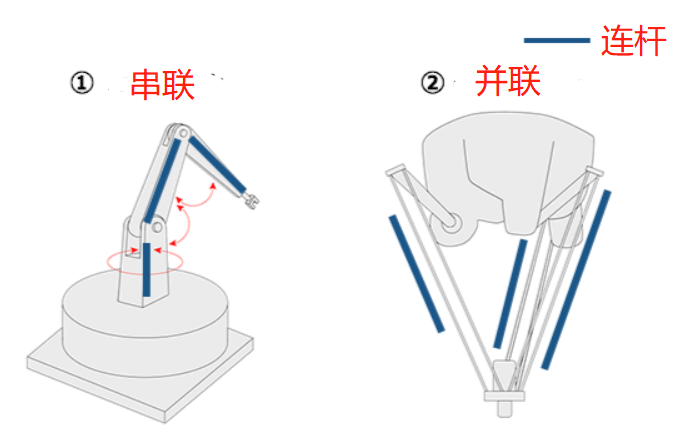
图2 串联机器人和并联机器人
串联机器人根据关节方向又分为垂直关节型和水平关节型,水平关节型机器人又称为SCARA机器人。

图3 垂直关节机器人(左图) 水平关节机器人(右图)
垂直关节机器人通常由6个关节组成,和人类手臂极其相似,其各关节完全模仿人类手臂。
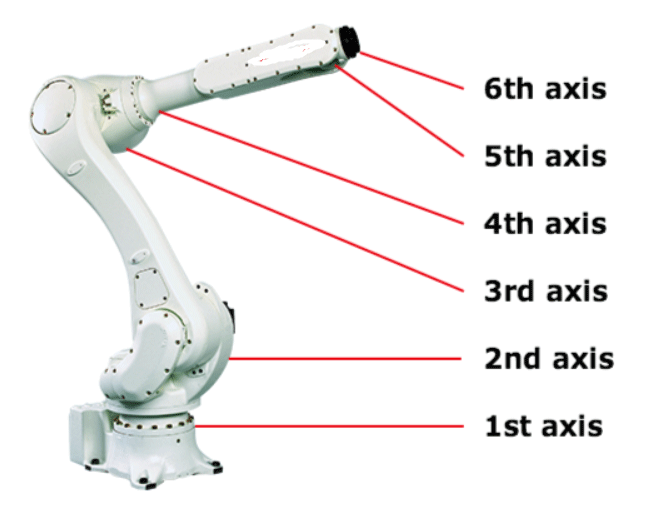
图4 垂直6关节工业机器人
下图详细展示了机器人和人类手臂之间的对应关系。其中J1轴对应腰部,J2轴对应肩部,J3轴对应手臂肘部,J4轴对应手腕旋转,J5轴对应手腕弯曲,J6轴对应手指运动。因此,机器人就可以像人类手腕一样自由活动了。
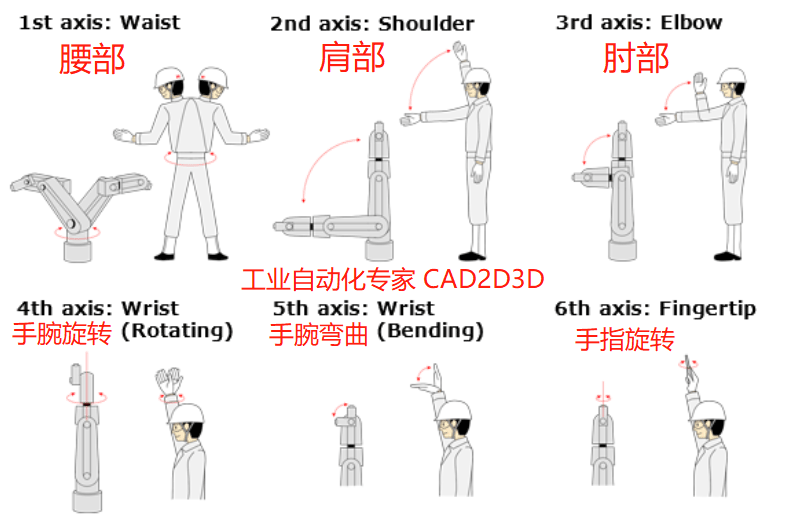
图5 机器人和人类结构对应关系
机器人运动方式很简单,就是模仿人类手臂运动。人类手臂各关节是靠肌肉来驱动,因此机器人各关节也需要驱动装置,比如可以采用伺服电机、伺服液压缸、电动滑台等来驱动各关节旋转。
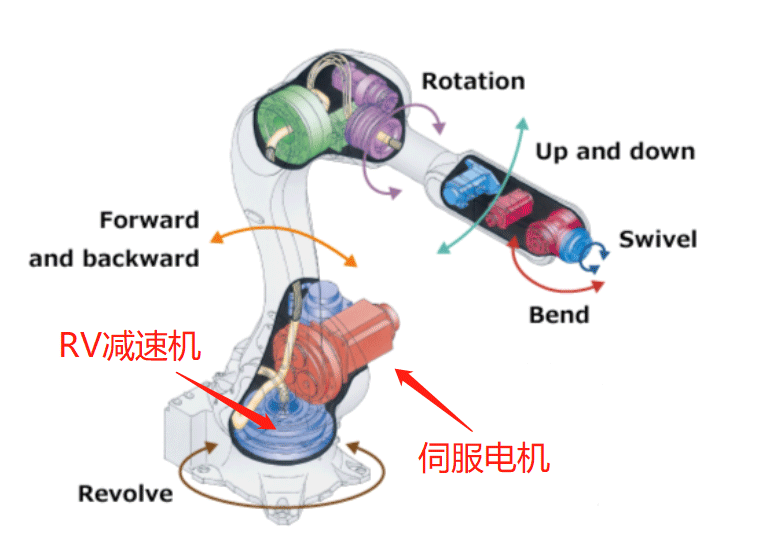
图6 机器人运动方式
机器人本体主要由电机、减速机、编码器和传动机构组成。
电机和编码器很常见,组在一起实现闭环控制,也就是常见的伺服电机,可以精确控制电机旋转角度。
减速机种类很多,中大型机器人使用RV减速机,小型机器人使用谐波减速机。
RV减速机详解:RV减速机内部构造和原理,机器人专用,日本垄断90%市场,谐波减速机详解: 谐波减速器内部构造和原理,这才是真正的机械,非常烧脑
机器人传动机构比较复杂,而且结构形式各种各样。J1至J3轴的传动机构都是就地放在关节附近,但J4至J6轴的传动机构一般都要提前放置,机器人末端尽量不要放电机,最大程度的减少末端体积,方便机器人进入狭小空间。
J4至J6轴传动机构很复杂,比如日本FANUC M-20系列机器人末端用的是准双曲面锥齿轮,这种传动机构是最高级的,另外还要常规的齿轮传动、同步带传动、万向节传动轴传动等。机器人很简单,其原理和人体相似,机器人又很复杂,国产机器人一直默默无闻。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1880.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度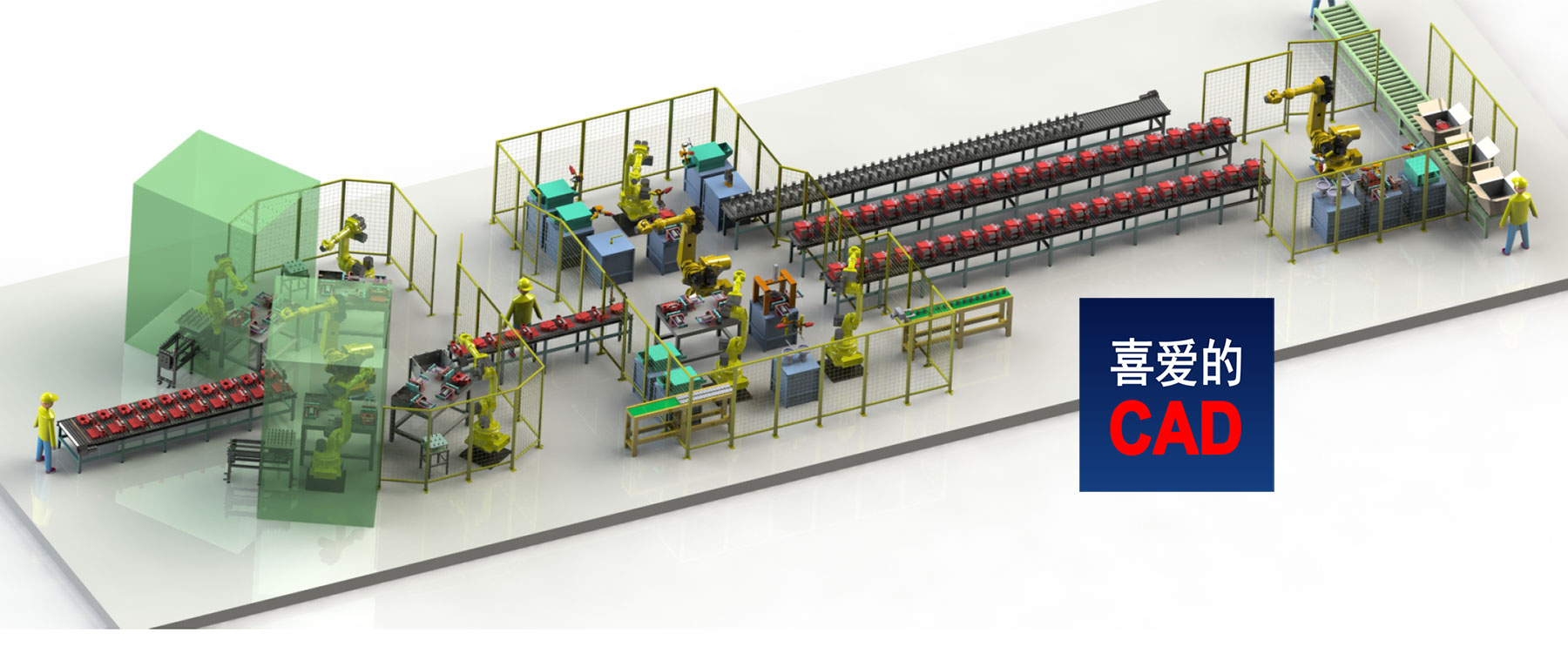 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案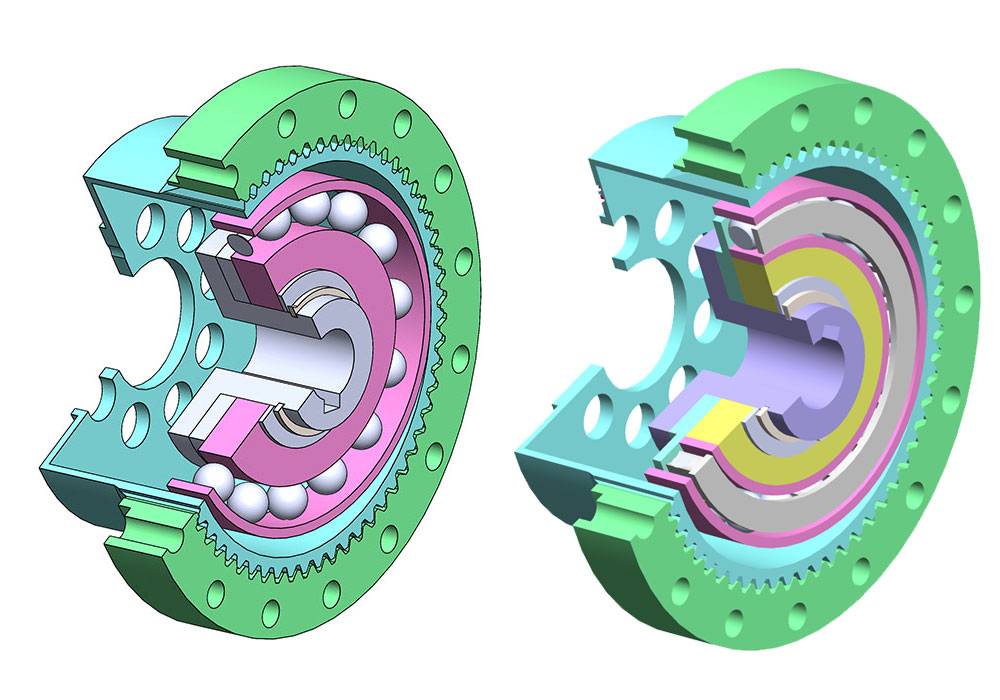 无言以对!又被客户按在地上摩擦了,客户对我这个带边线的三维模型意见非常大,非让我改成不带边线显示的
无言以对!又被客户按在地上摩擦了,客户对我这个带边线的三维模型意见非常大,非让我改成不带边线显示的 国产机床一直在追赶,但差距好像没变小,无法逾越的坎,是否该放弃?
国产机床一直在追赶,但差距好像没变小,无法逾越的坎,是否该放弃? 机器人给机床开关门,为什么很多人接受不了,非要给加个自动门?
机器人给机床开关门,为什么很多人接受不了,非要给加个自动门?- 304不锈钢设备我都不敢承诺使用寿命20年,为啥钢筋混泥土的房子开发商却敢承诺寿命50年?
- 可燃气体和有毒气体检测报警仪设置标准
- 太难了!谐波减速机靠弹性柔轮传递动力,减速增扭也是成比例的吗?
- 工程师只知道闭门造车,没有考虑扳手空间,这个螺母让我怎么拧?
- 方案大师:3 典型自动化生产线设计方案 3.1 铝合金浇铸自动化生产线
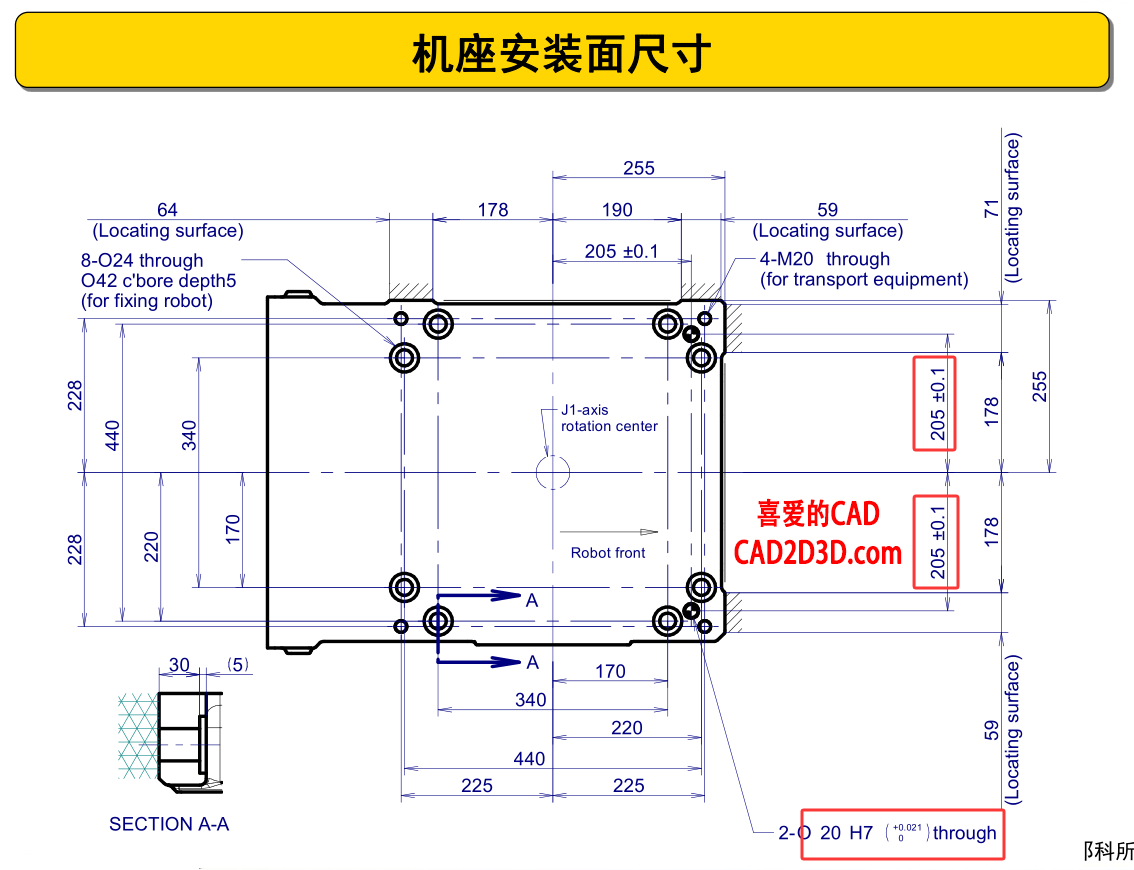 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载