
 官网现货 智能电气设计EPLAN 第2版 教材 9787111774662 机械工业出版社 电气设
官网现货 智能电气设计EPLAN 第2版 教材 9787111774662 机械工业出版社 电气设  新版照明设计手册(第三版)电气工程师执业资格考试参考供配电考试书籍 建筑照明室外照明 照明设计手册电
新版照明设计手册(第三版)电气工程师执业资格考试参考供配电考试书籍 建筑照明室外照明 照明设计手册电  电气绘图eplan设计图纸代做西门子plc程序设计修复远程安装服务
电气绘图eplan设计图纸代做西门子plc程序设计修复远程安装服务 并联机器人说起来简单做起来难。
刚在国外网站看到一款日本FANUC公司的并联6轴机器人,当时就把震惊到了,这是我第一次见到这种类型的机器人。

我仔细观察了半天,其实这货跟蜘蛛手机器人很像,只不过蜘蛛手的负载很小,而这货的负载达到110kg。
我看了一下机器人四大家族机器人产品线,发现FANUC、安川和ABB都是并联机器人,只有KUKA没有。然后我又看了一下国内机器人厂家的产品线,新松、埃斯顿和埃夫特都没有并联机器人。相比于机器人四大家族其他三家,KUKA实力最弱,而国内机器人厂家的实力不言而喻,至此,我有个疑惑,并联机器人的生产制造是不是有点难度?
仔细观察串联机器人和并联机器人的结构,并联机器人6轴连杆同时连接到末端法兰盘,6个连杆是并联的形式,极易出现过配合的情形,对零件加工精度和装配精度要求极高,就像一个6条腿的小板凳,必然出现3条腿不着地的情形,而串联机器人就简单多了,就算各部件精度再差,也能组装起来,虽然最终的精度会差一点,但基本的功能都能实现。
机器人难的不是算法而是工艺。工业机器人已经发明80多年了,相关的算法也很成熟了,网上相关的教程多的是,还有很多开源的机器人控制系统,直接拿过来用就可以了。我们的机器人和国外的机器人最大的差距还是在工艺,工艺不到位,就生产不出来,或者生产出来的精度不够。
归根到底,还是在基础,只有把底层的材料、机械等搞透彻,才有可能做出高端设备。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-2014.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




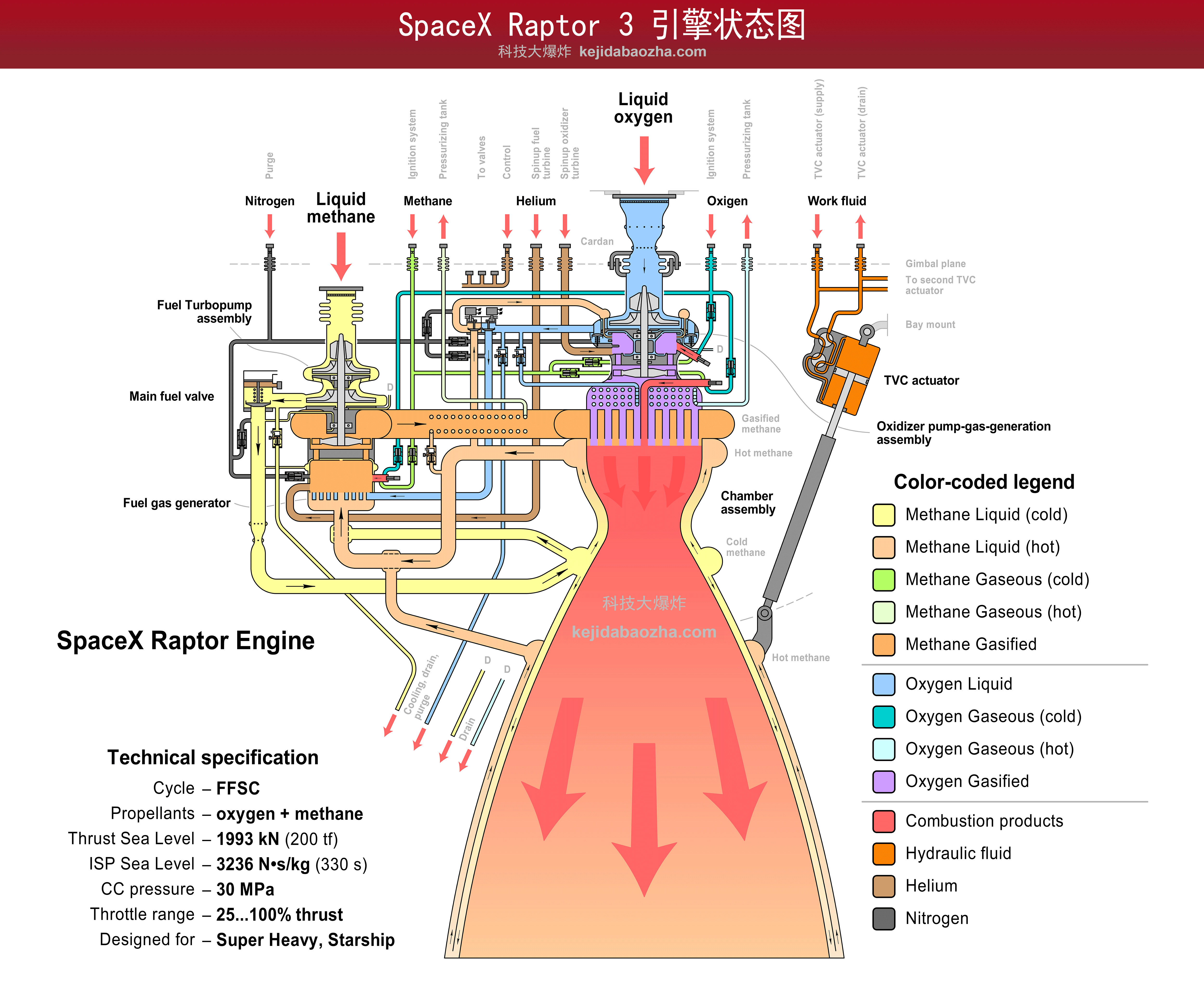 SpaceX Raptor 3 引擎工作原理图,火箭发动机零部件组成及中英文对照,一张图胜过千言万语
SpaceX Raptor 3 引擎工作原理图,火箭发动机零部件组成及中英文对照,一张图胜过千言万语 如何利用视觉相机识别区分平垫片正反面?
如何利用视觉相机识别区分平垫片正反面? 金属锻造氧化皮高压水清洗机
金属锻造氧化皮高压水清洗机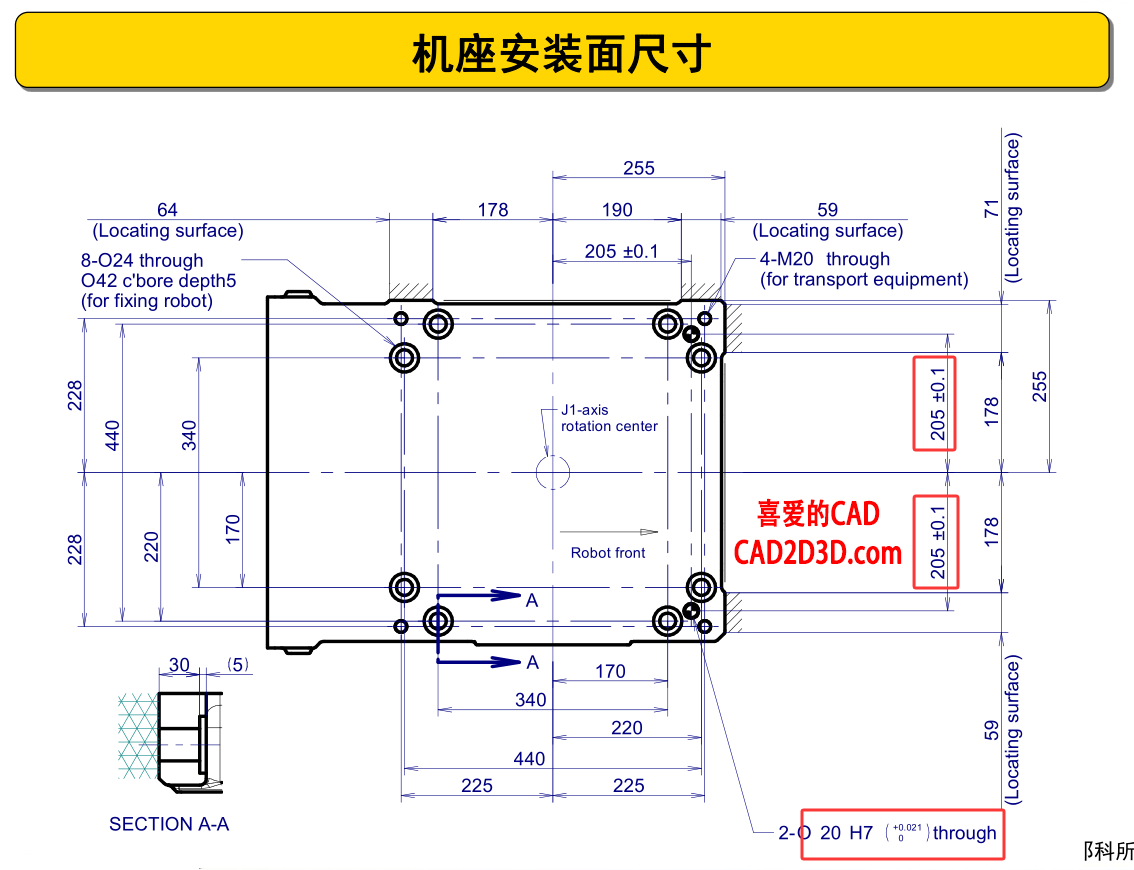 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
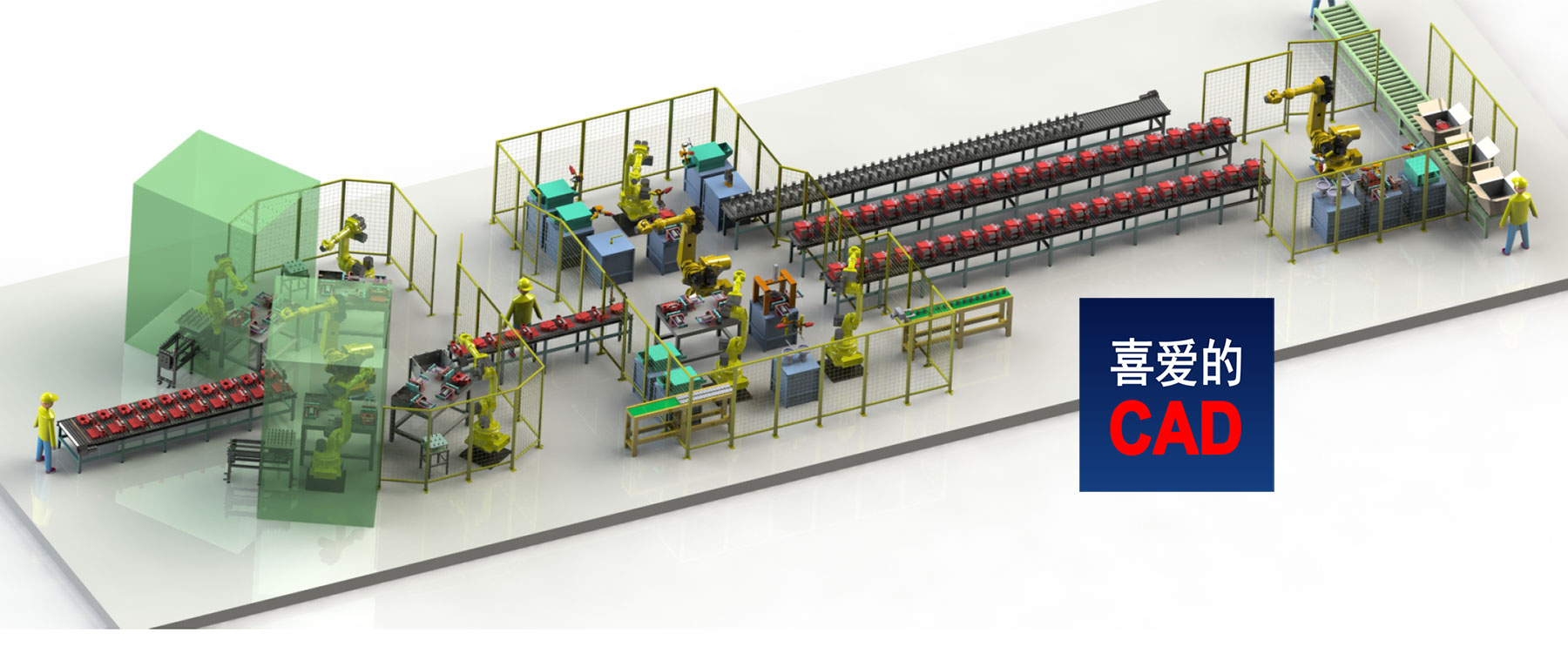 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
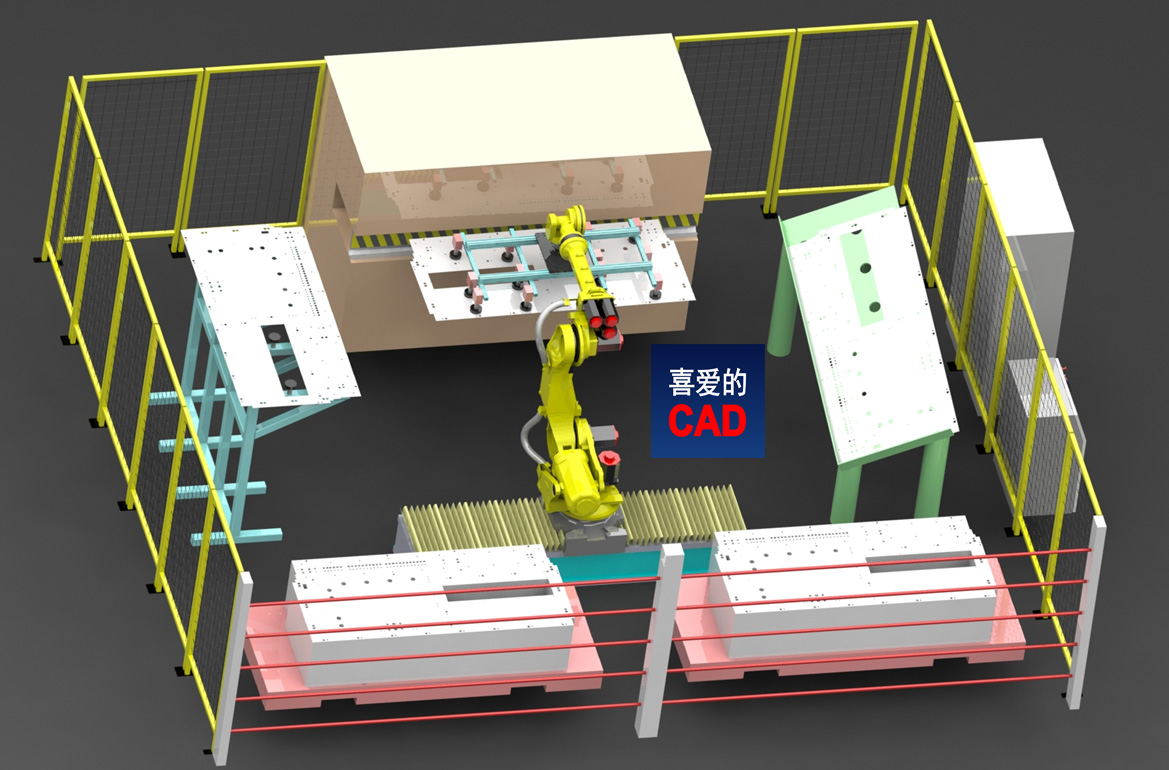 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
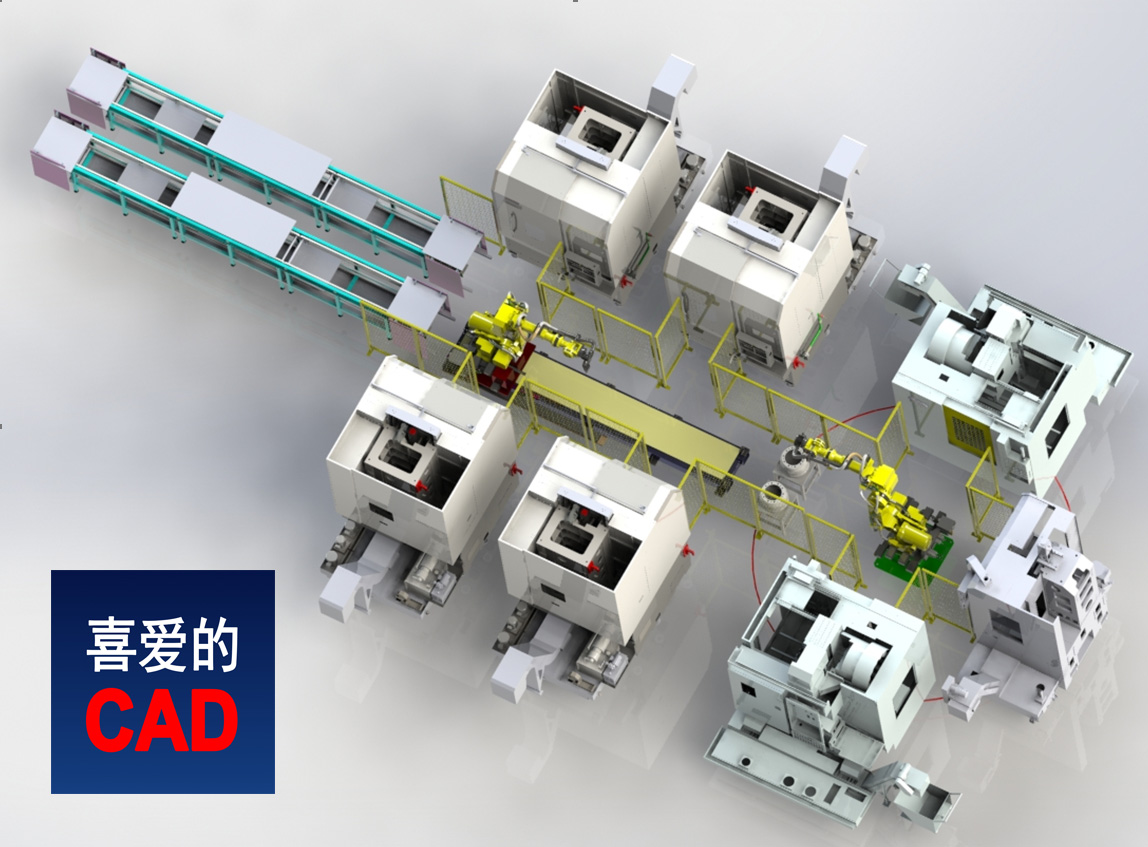 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载