
与
机器人 相关商品:
查看所有与
机器人 相关商品 >>
 加大儿童数字变形男孩金刚益智拼装汽车玩具积木男童字母机器人
加大儿童数字变形男孩金刚益智拼装汽车玩具积木男童字母机器人  奥迪双钻超级飞侠乐迪黑金小子大变形机器人经典机库墙儿童玩具
奥迪双钻超级飞侠乐迪黑金小子大变形机器人经典机库墙儿童玩具  构趣积木瓦力科技机器人星球大战儿童拼装益智玩具模型机器总动员
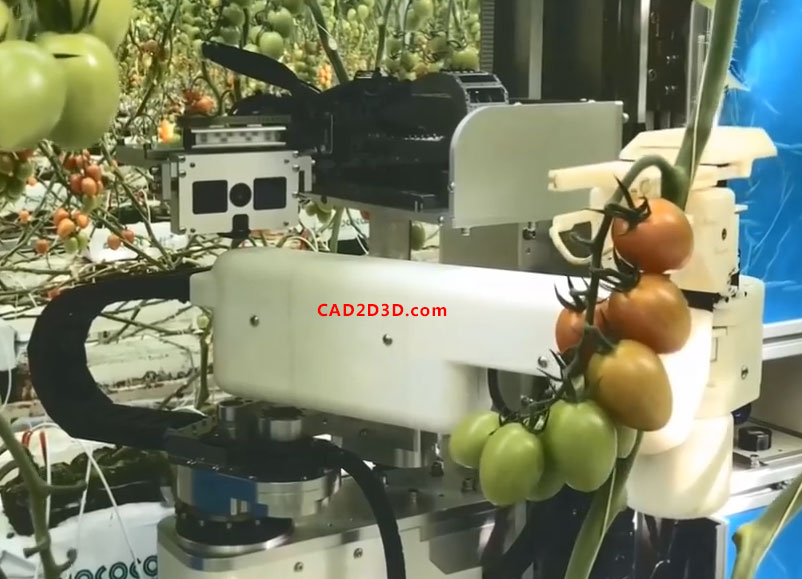
构趣积木瓦力科技机器人星球大战儿童拼装益智玩具模型机器总动员 那么番茄采摘器人实际上是如何工作的呢?
机器人沿着铺设在番茄之间的导轨上移动,机器人配备了具有图像识别功能的相机,使用它来查找成熟的西红柿,并通过颜色确定是否应该采摘它们。先让西红柿穿过机器人手爪上的一个环,然后拉动这个环,将番茄摘下。


目前机器人采摘西红柿的速度是6秒每个,而人工是2-3秒,因此人工速度更快,但人只能工作3-4个小时,而机器人可以连续工作10个小时或更长时间,而且也可以在晚上工作,因此机器人采摘是为了趋势。
番茄采摘机器人开发的问题之一是如何判断番茄是否成熟。
解决问题的焦点放在颜色变化上,没成熟的是青色的,成熟的是红色的。基于颜色差异,采用了视觉识别系统,该系统可以自动识别番茄的颜色,并将其与农场生产的颜色样本进行比较以确定其成熟程度。
颜色样本范围可以自由设置。如果要降低成熟度以增加产量,则只需更改设置即可,使其比正常情况更接近绿色范围。
未完待续 ~
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1261
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1261.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度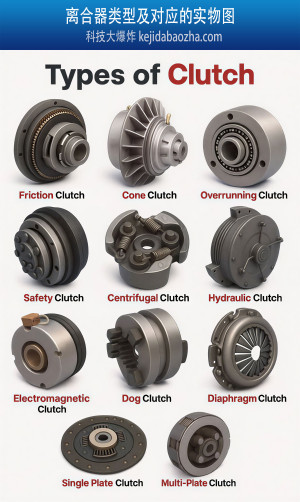 离合器种类及对应的实物图,各种离合器名称中英文对照
离合器种类及对应的实物图,各种离合器名称中英文对照 LNG管道材质是不锈钢,气化器接口是铝,不同材料的法兰怎么连接?
LNG管道材质是不锈钢,气化器接口是铝,不同材料的法兰怎么连接? 两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代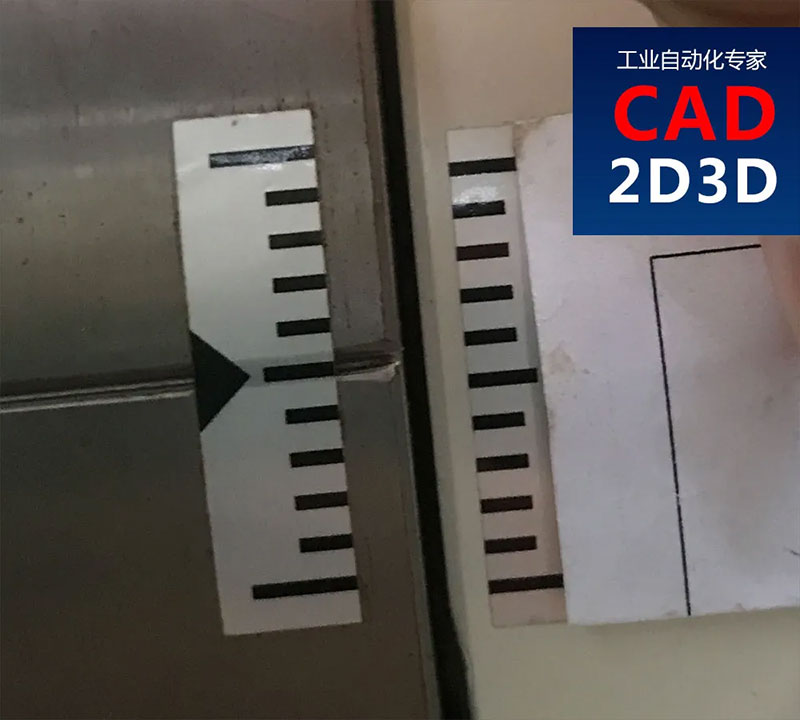 某品牌机器人的原点标识好像有点问题啊
某品牌机器人的原点标识好像有点问题啊 机床用自定心中心架内部构造和规格参数
机床用自定心中心架内部构造和规格参数更多最新发布: 行业现状
-
我还以为AI有多厉害,没想到它是个弱智,腾讯龙虾QClaw搞不定就闪退,还自己删除指令内容,好的没学会,竟然学会了偷奸耍滑
-
 明明产能过剩,为何手机内存出现短缺?真相太扎心
明明产能过剩,为何手机内存出现短缺?真相太扎心
-
 可望而不可及,美国人工智能大型语言模型 Claude app unavailable in region,不带我们玩,未来我们该怎么办?
可望而不可及,美国人工智能大型语言模型 Claude app unavailable in region,不带我们玩,未来我们该怎么办?
-
中国人形机器人行业头部公司 TOP 9,人形机器人是真有需求,还是资本一场大炒作?
-
 比起到处画饼的人形机器人,晋亿螺丝这样的实在公司才该被追捧
比起到处画饼的人形机器人,晋亿螺丝这样的实在公司才该被追捧
-
 机械工程师的避坑指南:去项目型公司还是产品型公司?选错悔终身!
机械工程师的避坑指南:去项目型公司还是产品型公司?选错悔终身!
-
 出货量榜首?人形机器人刚开始就已经遥遥领先,浮躁又浮夸,吃相太难看
出货量榜首?人形机器人刚开始就已经遥遥领先,浮躁又浮夸,吃相太难看
-
正泰电器低压元器件最新调价通知,涨价幅度高达50%,电气行业瑟瑟发抖
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载