
与
工业机器人 相关商品:
查看所有与
工业机器人 相关商品 >>
 伯朗特BRTIRUS0805A六轴工业机器人赋能智造升级负载5KG臂展940MM
伯朗特BRTIRUS0805A六轴工业机器人赋能智造升级负载5KG臂展940MM  伺服切割机器人六轴自由度机械臂爪工业手臂焊接喷涂冲压送料码垛
伺服切割机器人六轴自由度机械臂爪工业手臂焊接喷涂冲压送料码垛  派曦科技 【A3加大】快抄宝P23pro自动写字机器人适合工业cad绘图
派曦科技 【A3加大】快抄宝P23pro自动写字机器人适合工业cad绘图 机器人有多种坐标系,常用的World/User/Tool三种坐标系,调试机器人时可以根据需要切换不同的坐标系,Tool坐标系在机器人末端法兰盘,移动机器人末端时最方便直接,今天就来介绍一下Tool坐标系的用法。

未完待续 ~
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1356
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1356.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示 相较于医生老师,机械工程师应该是最轻松的工作吧
相较于医生老师,机械工程师应该是最轻松的工作吧 USB接口类型大全及对应的传输速度,Type C原来也是USB
USB接口类型大全及对应的传输速度,Type C原来也是USB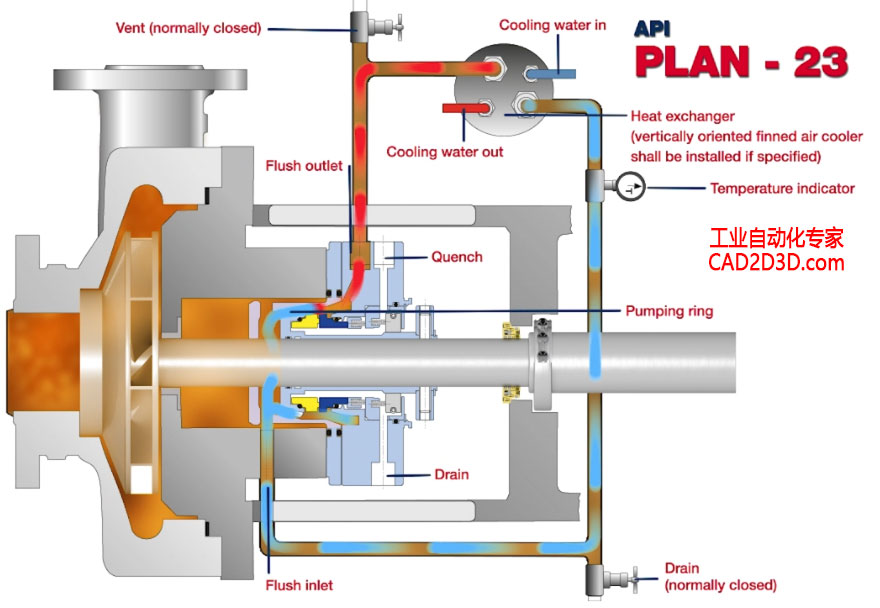 离心泵可以空转吗?看过美标 API 682 之后才恍然大悟!原来网上的信息都是错的!
离心泵可以空转吗?看过美标 API 682 之后才恍然大悟!原来网上的信息都是错的!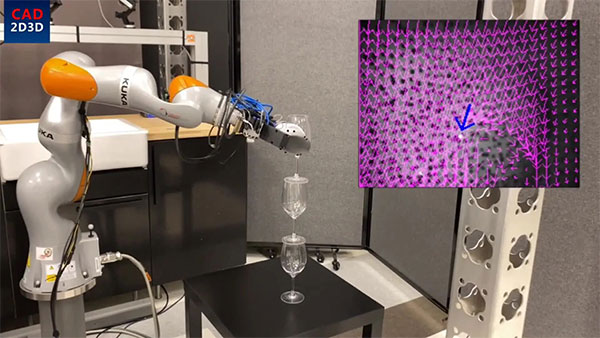 柔性气泡爪,内表面点阵,视觉识别点阵变化,自动反馈手爪状态
柔性气泡爪,内表面点阵,视觉识别点阵变化,自动反馈手爪状态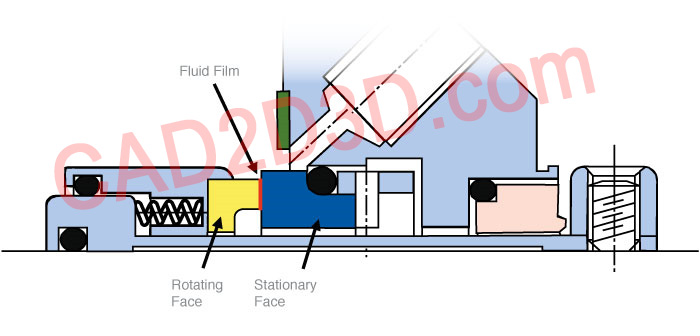 泵机械密封内部构造及运行原理
泵机械密封内部构造及运行原理
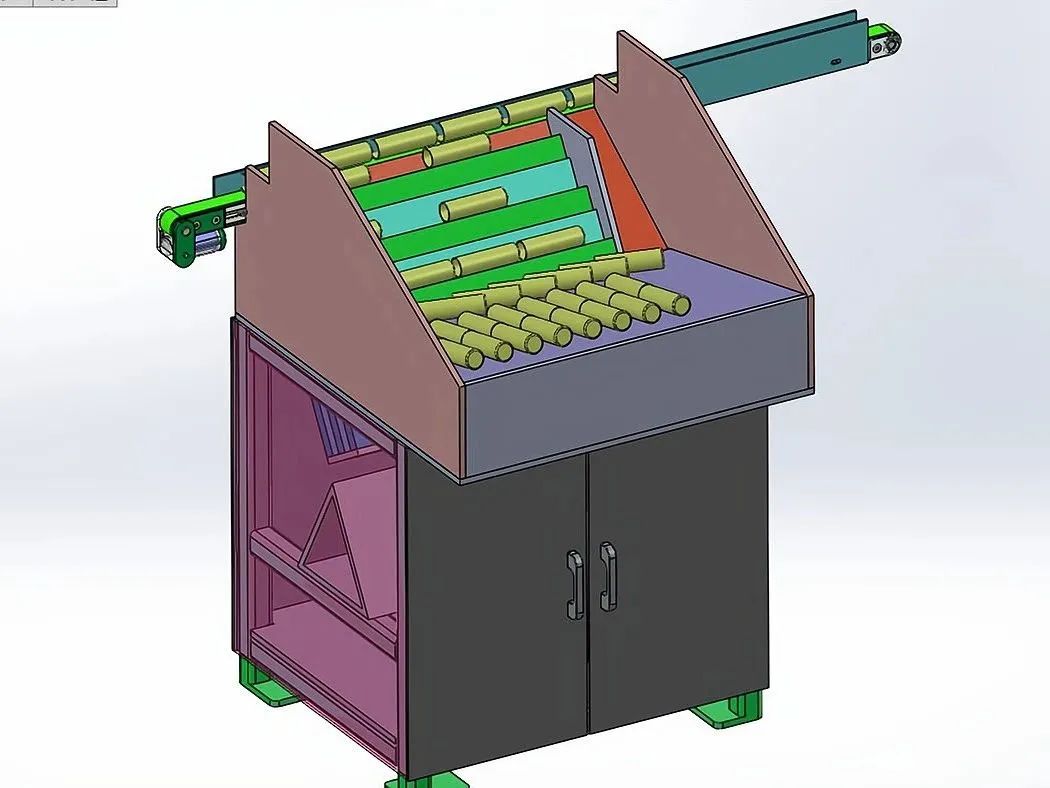 干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
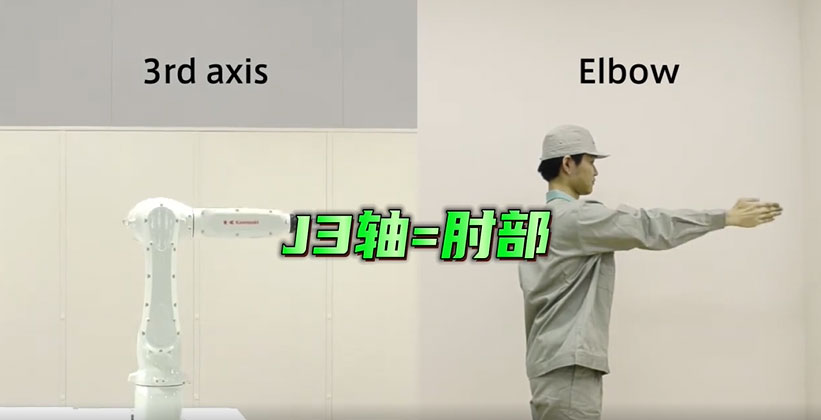 不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
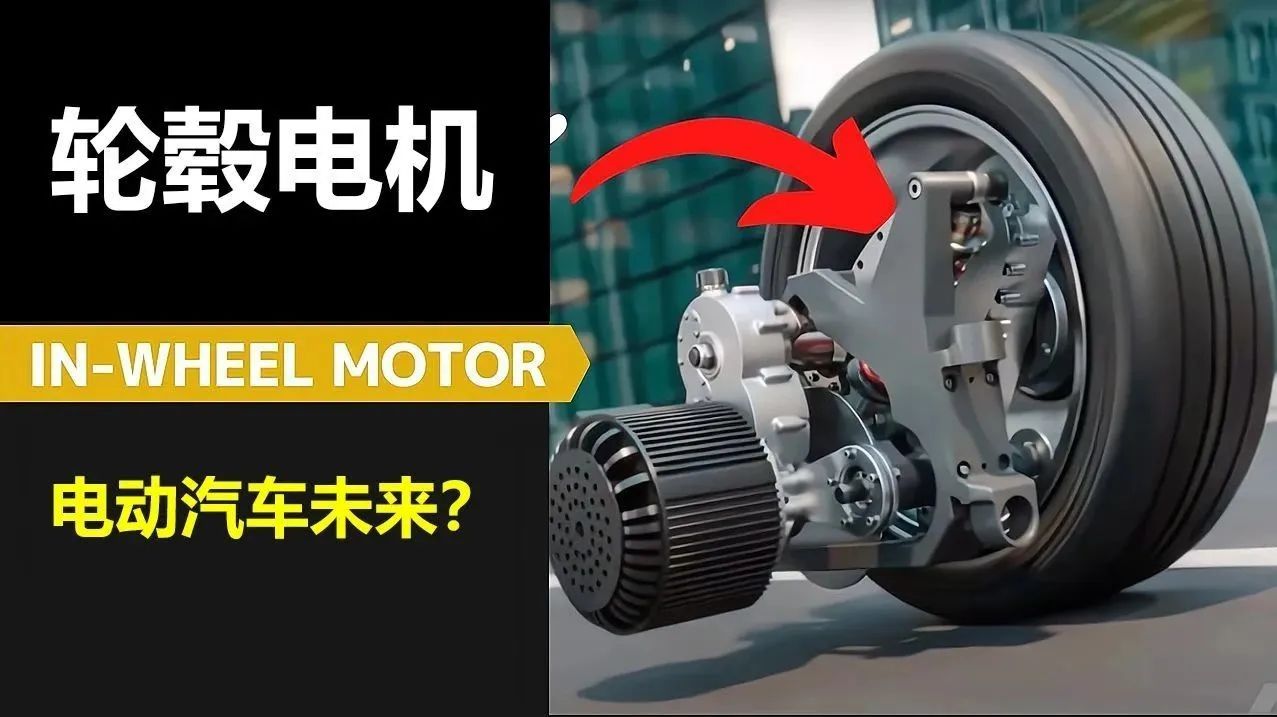 干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
 两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
两百年前的机器如何运行?那时没有电,只有天轴,机械的黄金年代
 国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
国外工厂200年前已经实现机械化,那时没有电,设备如何驱动?
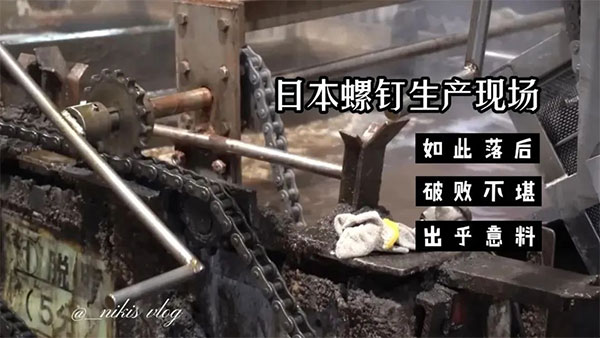 日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
 纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
纯机械方式实现的二轴机械手,完全去电气化,尽显机械之美
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载