
与
科技数码 相关商品:
查看所有与
科技数码 相关商品 >>
 Apple/苹果 iPhone 15 Pro Max国行双卡苹果15Promax手机正品现货
Apple/苹果 iPhone 15 Pro Max国行双卡苹果15Promax手机正品现货  国行正品 Apple/苹果 iPhone 14/苹果14/13/12全网通手机三期免息
国行正品 Apple/苹果 iPhone 14/苹果14/13/12全网通手机三期免息  国行正品 Apple/苹果 iPhone 15 苹果15Plus/14Plus全网通5G手机
国行正品 Apple/苹果 iPhone 15 苹果15Plus/14Plus全网通5G手机 机器人应用于拣取容器中任意堆放的零件,实际应用中主要包括2种情况:
- 结构性拣取零件:是指容器中的每一个零件都是正面朝上的。
- 任意性拣取零件:是指零件在容器中是任意堆放的。
显然后一种零件拣取方式更具有挑战性。
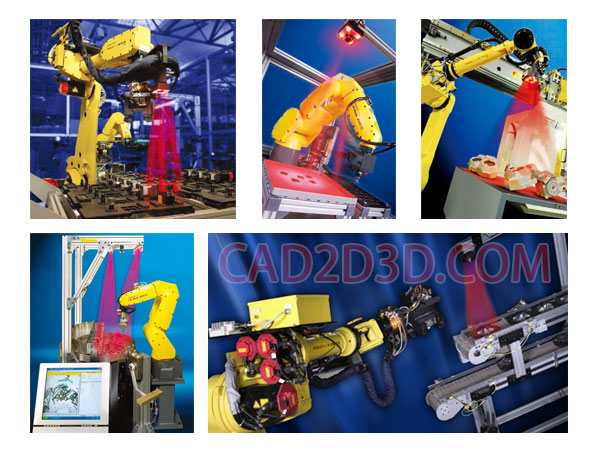
达到这一目的需要满足三个基本要素:
- 视觉系统
- 容器防碰撞
- 防碰撞监测系统
需要视觉系统,这是毋庸置疑的事情,因为首先需要找到零件究竟在什么地方。
只依靠容器壁进行检测具有一定的局限性,因为机器人的手爪还将进一步深入到容器的底部,因此零件的拣取将会越来越困难。在容器中拣取零件所使用的手爪的角度姿态需要完全满足工件抓取要求。在这样的工作条件下,一旦当零件的位置被确定以后,机器人就开始进行自动运算,确定其是否真的能够从容器中拣取这一零件。
第三个要素就是防碰撞检测。最终,机械手必然会触及到容器壁,因此它需要区分究竟是属于软接触还是硬接触,如果是硬接触可能会损坏机器人系统。
目前规整的工件实现乱料抓取没有问题,但形状特别复杂,不规则的零件实现乱料抓取还有很大难度,不光涉及到3D视觉技术,还有手爪结构设计,个人见过的最高级的手爪结构是柔性手爪结构,手爪由多连杆、多关节组成,可以自适应工件形状。
下面这个视频是比较规整的工件的一个乱料取料应用
下面这个视频是比较复杂的一个零件的乱料取料应用
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-789.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示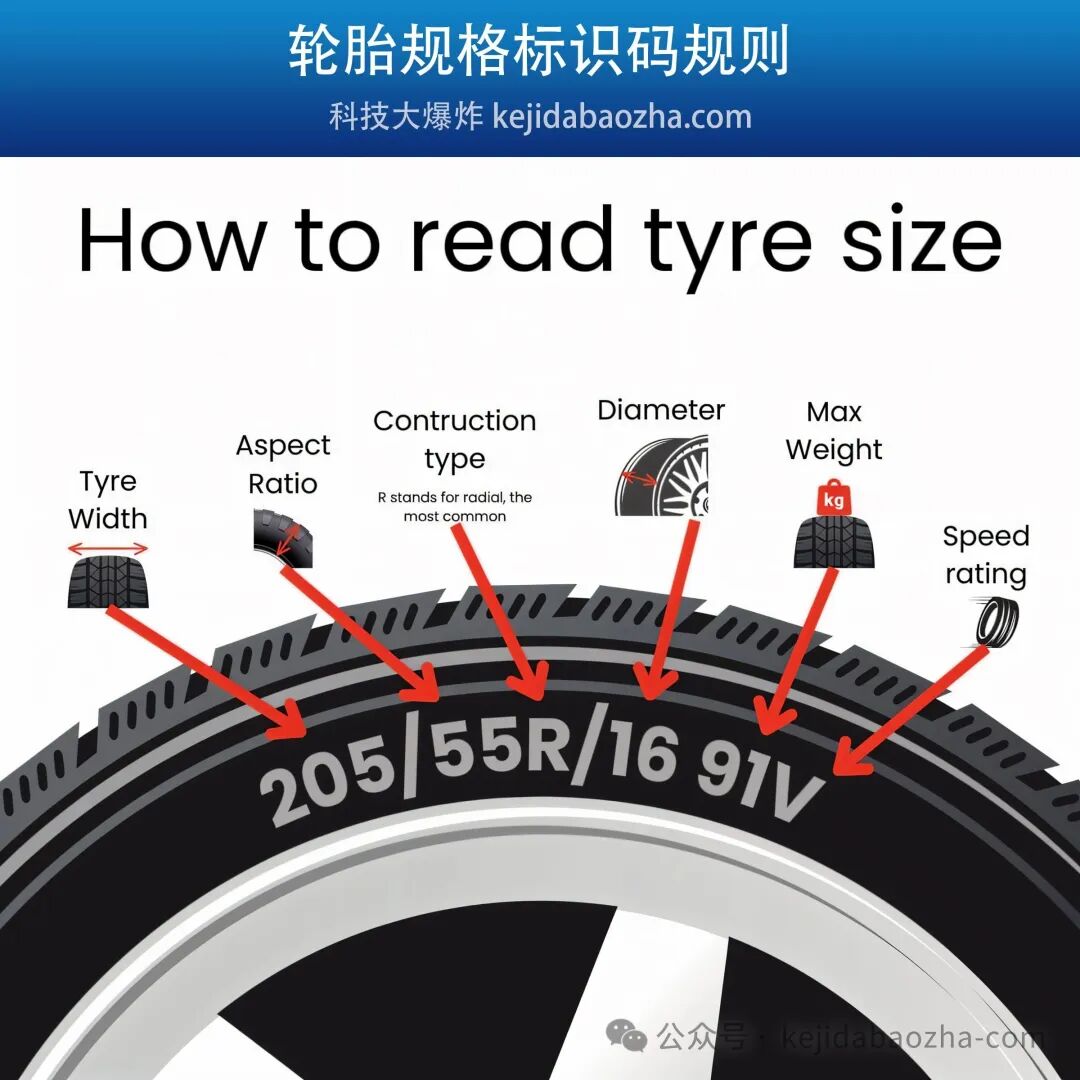 轮胎规格型号标识码规则,轮胎参数中英文名称对照
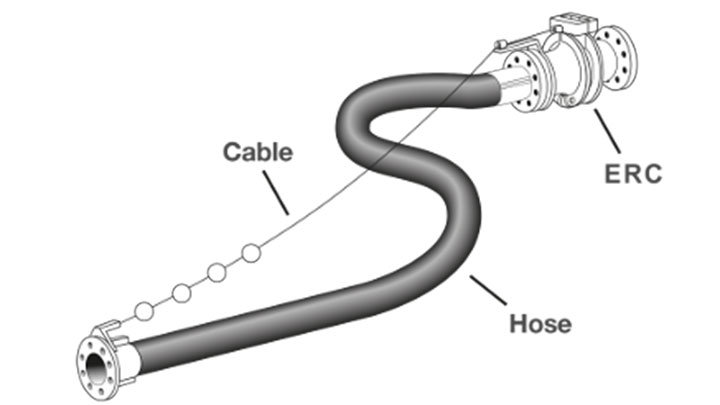
轮胎规格型号标识码规则,轮胎参数中英文名称对照 电鼓 卷线器自动伸缩卷管器 绕管器 电缆回收器
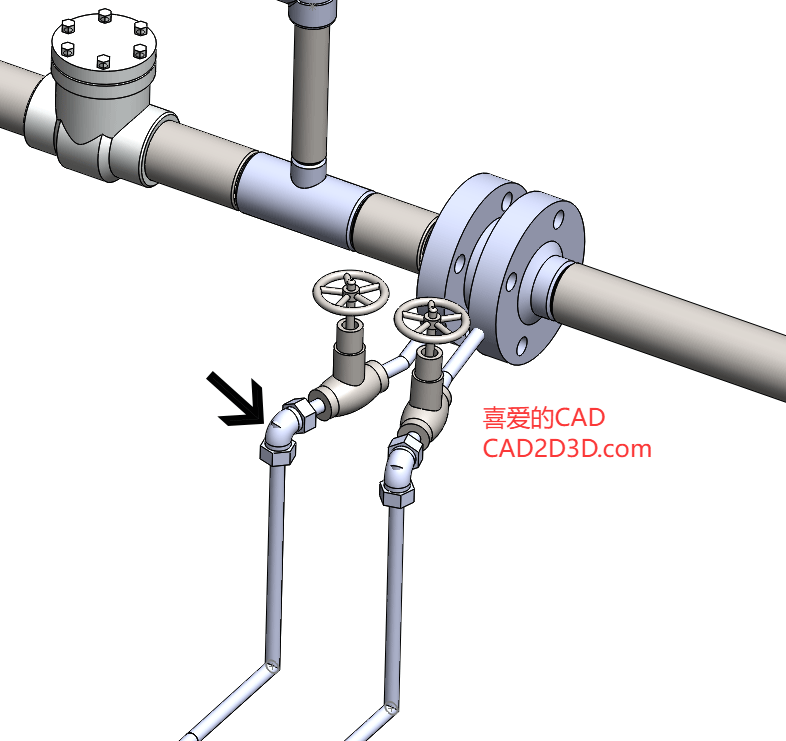
电鼓 卷线器自动伸缩卷管器 绕管器 电缆回收器 LNG 槽车加注预冷采用上进液还是下进液?
LNG 槽车加注预冷采用上进液还是下进液?
 卡套式接头连接和密封可靠吗?总感觉压力大了或时间长了它会松动
卡套式接头连接和密封可靠吗?总感觉压力大了或时间长了它会松动
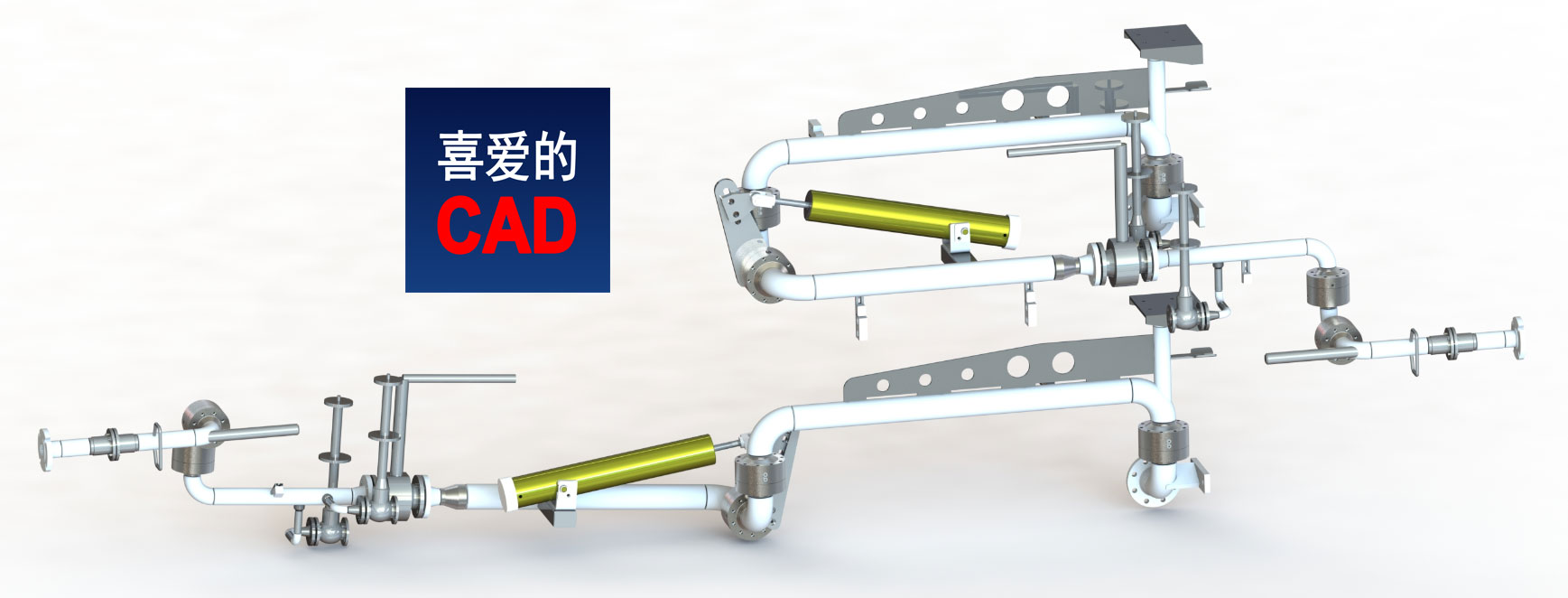 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
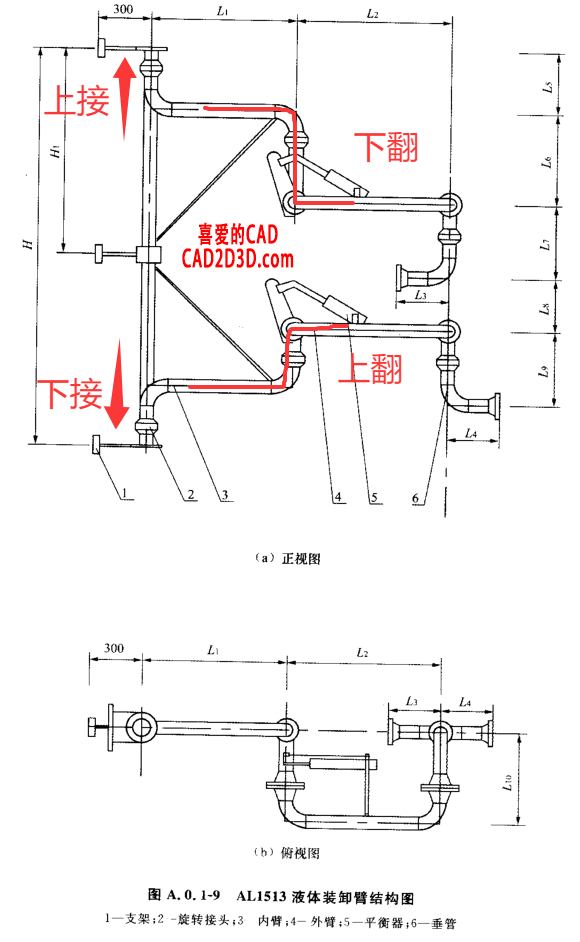 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载