链条上下运动机构
| | 空转
寺 导 杆
上 接受 损 i !
-TH wh
F ; 呈 训 |
ZR
| 链条
e
7
T [T
传送 头 -HT 上 HH i
|| | 饲 服 电 动
;工件
THEE =l
T
gR2R
SOL:
SOLt
LRREBH =
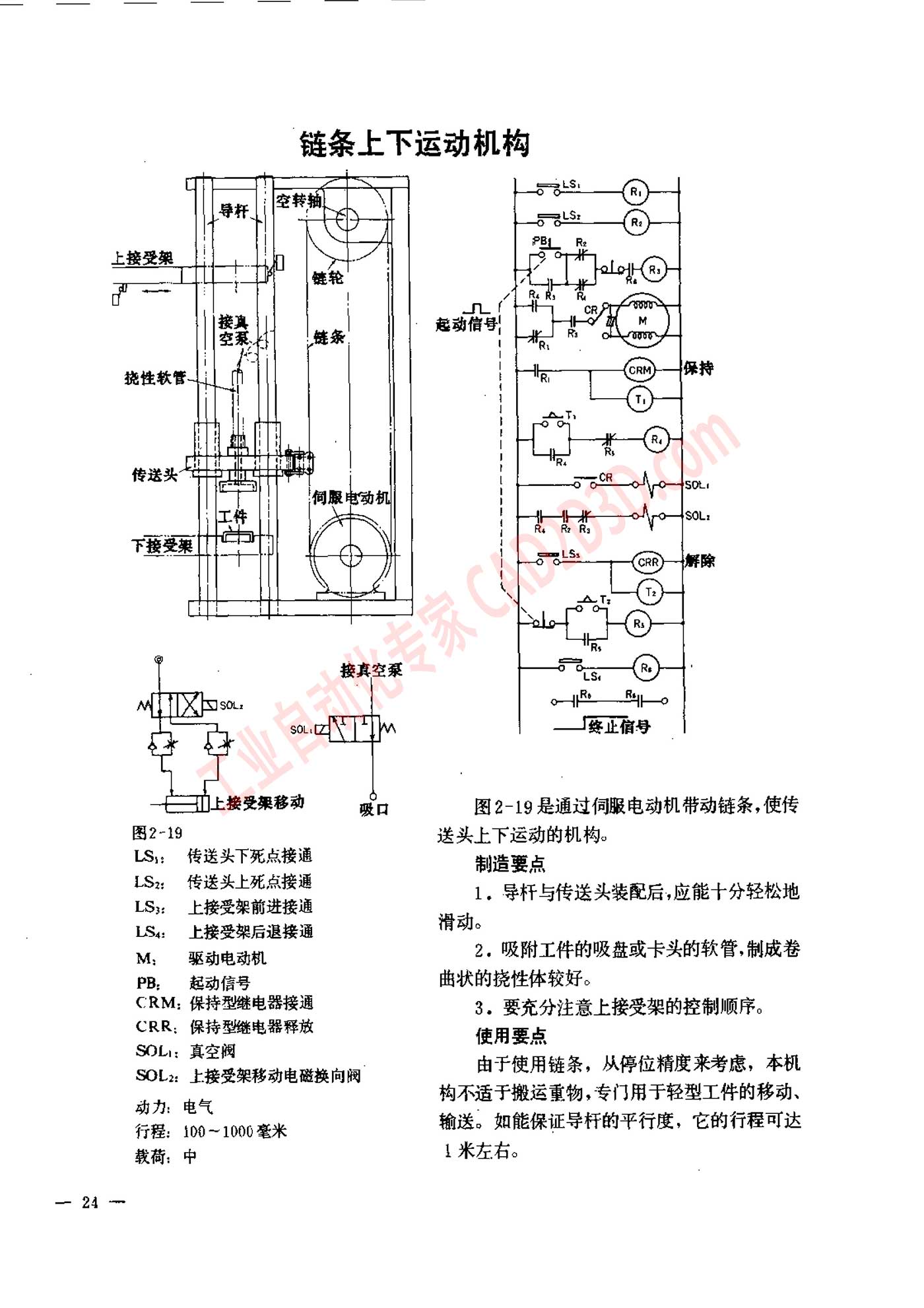
图 2-19
一 24 一
链条 上 下 运动 机 构
LS,, 传送 头 下 死 点 接 遂
LS:, 传送 头 上 死 点 接 通
LS;: 上 接受 架 前 进 接 通
LS4 上 接受 架 后 退 接 通
M:, 驱动 电动 机
PB: ”起动 信号
CRM: 保持 型 继电器 接 通
CRR:, 保 持 型 纪 叫 器 释放
SOLD: 真空 间
SOL:: 上 接受 架 移动 电 磋 换 向 阀
动力 电气
行程 ,100 一 1000 毫米
载荷 , 中
mL
起 动 信 身
R
图 2-19 是 通过 何 服 电动 机 带动 链条 , 使 传
送 头 上 下 运动 的 机 构 。
制造 要 点
1. 导 杆 与 传送 头 装配 后 ,应 能 十 分 轻松 地
滑动 。
2, 吸附 工件 的 吸盘 或 卡 头 的 软 管 , 制 成 卷
曲 状 的 挠 性 体 较 好 。
3。 要 充分 注意 上 接受 架 的 控制 顺序 。
使 用 要 点
由 于 使 用 链条 , 从 停 位 精度 来 考虑 , 本 机
构 不 适 于 搬运 重 物 , 专门 用 于 轻型 工件 的 移动 、
输送 。 如 能 保证 导 杆 的 平行 度 , 它 的 行程 可 达
1 米 左 右 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)