力臂比增力直线运动机构
SIS LL i HEEE I
g 复位 信号 ( JIL ,
《二 ) 起 动 信号 、 5 )
Te
一
上 ”此
民
—
._OJ < 的 一 一 气 氏 后 退
中 间 余下 信号 中 间 起 动 信号
(s ) & ()
—
Ls. R:
~ 一 和 5 一直 一 ~
(终止 信号
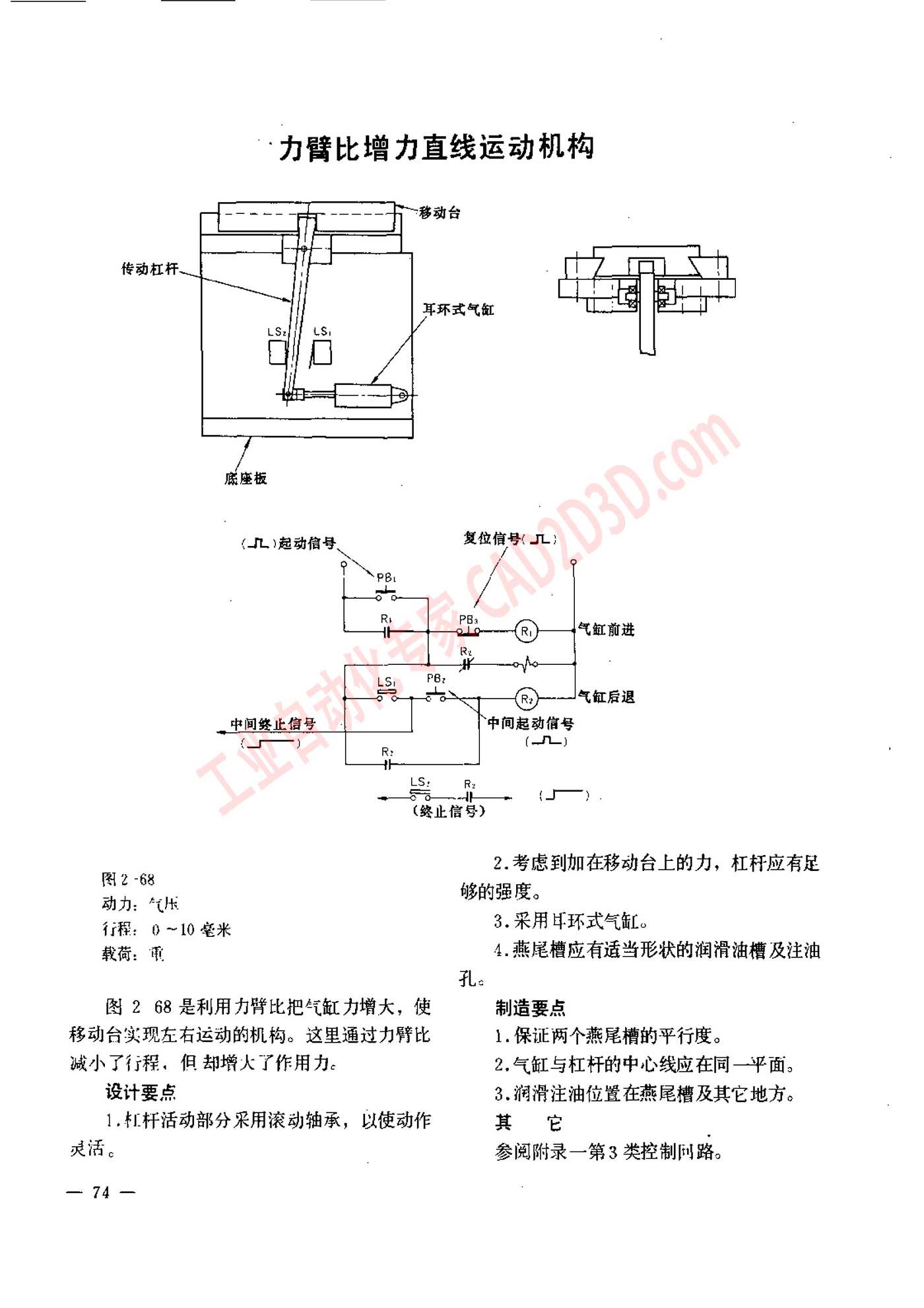
S 2. 考 虑 到 加 在 移动 侣 上 的 力 , 杠 杆 应 有 中
P 够 的 强度 。
和 得 , 0 ~10 4% 3. 采 用 十 环 式 气缸 。
区 4. 划 尾 模 应 有 适当 形状 的 润滑 油槽 及 注油
Al
图 2 68 是 利用 力 辟 比 把 气缸 力 增 大 , 使 制造 要 点
移动 台 实 现 左 右 运 动 的 机 梅 。 这 里 通过 力 臂 比 1. 保证 两 个 燕 屁 槽 的 平行 度 。
减 小 了 行程 , 但 却 增 大 了 作用 力 。 2, 气 抵 与 杠杆 的 中 心 线 应 在 同一 平面 。
设计 要 点 3. 润 滑 注 油 位 置 在 燕尾 槽 及 其 它 地 方 。
1 ,杠杆 活动 部 分 采用 滚动 轴承 , 以 使 动作 H € .
Rifi . 参阅 附录 一 第 3 类 控制 思路 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)