
 杨幂同款SIINSIIN鲨鱼裤女外穿夏季健身骑行瑜伽裤收腹提臀打底裤
杨幂同款SIINSIIN鲨鱼裤女外穿夏季健身骑行瑜伽裤收腹提臀打底裤  蕉下美体阔腿裤女2026新款春高弹阔腿瑜伽裤窄版直筒裤垂感休闲裤
蕉下美体阔腿裤女2026新款春高弹阔腿瑜伽裤窄版直筒裤垂感休闲裤  小野和子鲨鱼裤女外穿2026新款春季塑形薄款瑜伽裤收腹提臀打底裤
小野和子鲨鱼裤女外穿2026新款春季塑形薄款瑜伽裤收腹提臀打底裤 机器人朝着通常示教的目标位置正确地进行操作。
因此,在将工件安装在机床上进行作业的情况下,由于工件的精度偏差,与机床之间的相对位置会出现偏移,由此而可能导致工件与机床相互干涉。在将精度上有偏差的工件安装到机床上时,软浮动功能将十分有效。
此外,在与液压引起的挤出同步地取出工件而同步速度不稳定的情形,以及粗削工件等希望准确地进行机器人无法抓取的工件搬运的情况下,软浮动功能也同样十分有效。
软浮动功能执行如下操作:
- 支持的软浮动有关节软浮动和笛卡尔软浮动,关节软浮动指定与机器人各机臂的旋转方向相关的柔度,而笛卡尔软浮动则沿着笛卡尔轴方向指定柔度。
- 通过程序上的指令来指定本功能的有效/无效、以及条件。
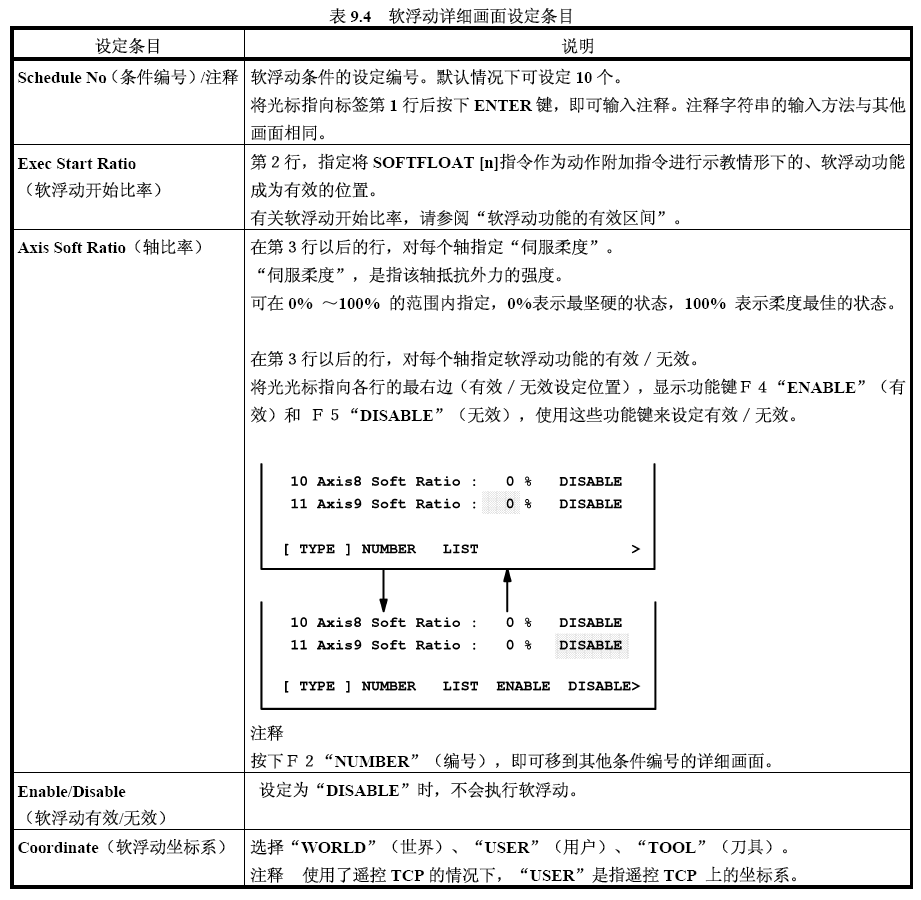
- 可以针对每个轴指定“伺服柔度”。
“伺服柔度”,是指该轴抵抗外力的强度。
可在0% ~100% 的范围内指定,100% 表示柔度最佳的状态。“伺服柔度”,由将1组(9个轴)的数据汇总起来的条件表来指定。
- 机器人上被施加某一定值(抗御静摩擦力的程度)以上的外力时,机器人的轴在该外力的推动下运动。
- 机器人上被施加有外力的情况下,会影响机器人到达示教点。此时的示教点和到达点之间的距离,几乎与外力的大小成比例。
- 施加有静载荷(如,重力)的情况下,机器人将自动控制力,即使软浮动功能处在有效状态,也会保持其姿势。
软浮动功能的详细说明
程序指令语句
作为与软浮动功能相关的程序中的指令语句,备有如下3个。
- SOFTFLOAT[n](软浮动[n]) 该指令使用条件n 的数据而使软浮动功能有效。
- SOFTFLOAT END(软浮动结束) 该指令使得软浮动功能无效。
- FOLLOW UP(跟踪) 通常,如果没有外力,机器人就会返回到示教点,而在执行该指令的情况下,将当前位置视为示教点,机器人即使在外力丢失的情况下也不会返回示教点。SOFTFLOAT[n]指令,有两种使用方法:在程序内单独示教、和在动作语句后作
为动作附加指令示教。
在机器人动作中软浮动功能有效的区间,由该指令语句的示教形态等来确定。
单独指令:SOFTFLOAT[n]指令被单独示教前的一行的动作结束后,软浮动功能成为有效。
下面的例子中,在第1行的动作结束后,软浮动功能成为有效,并因第5行的SOFTFLOAT END 指令而成为无效。
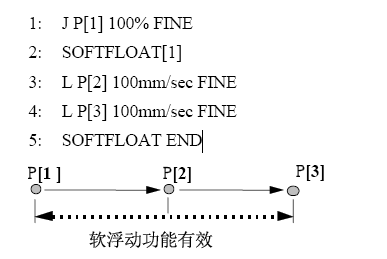
动作附加指令:软浮动功能在附加有SOFTFLOAT [n]指令的动作语句的执行途中成为有效。
软浮动功能在动作途中的哪个阶段成为有效,由软浮动条件的“Exec Start Ratio”(软浮动开始比率)来确定。
动作附加指令,由到达该位置(附加有SOFTFLOAT [n]指令的动作语句的示教点)之前的移动距离的比率(0% ~ 100% ,1% 刻度)来指定。
下例中,软浮动功能在第1行的动作语句的示教点 P[1]、和附加有SOFTFLOAT[n]指令的第2行的动作语句的示教点 P[2]之间成为有效。

注意:笛卡尔软浮动不支持动作附加指令。
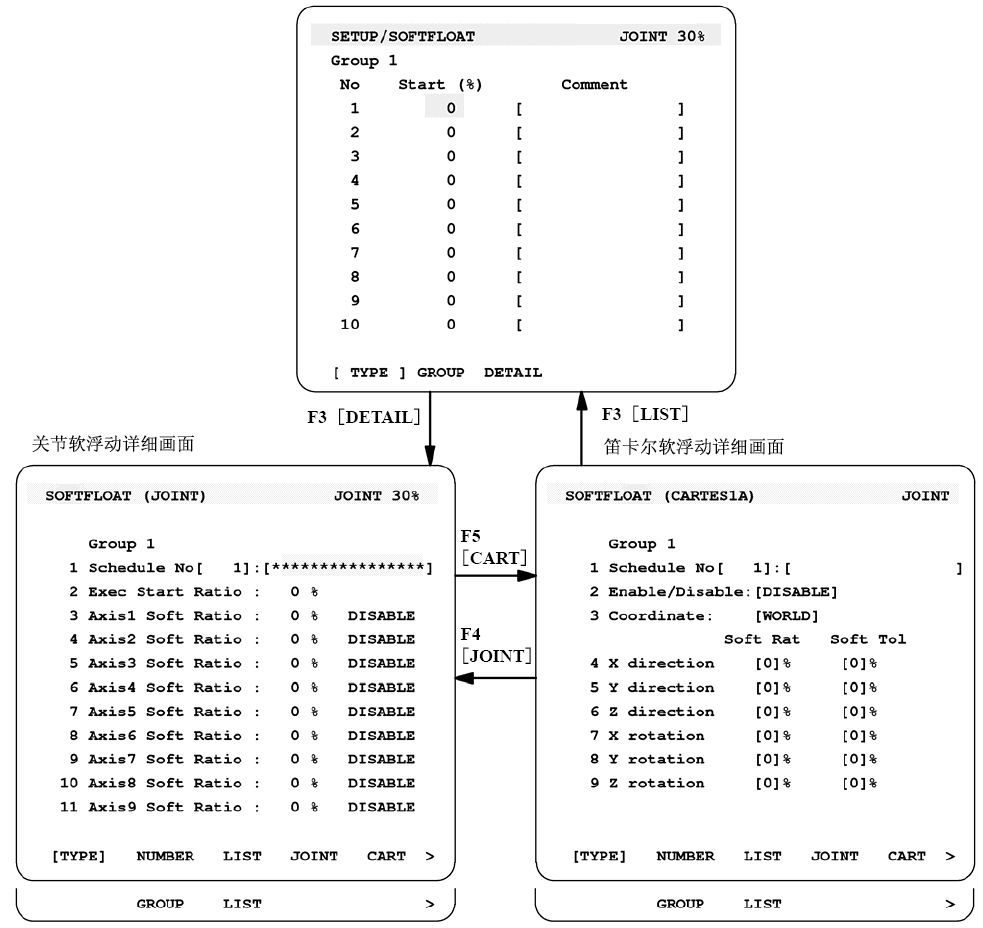
条件设定画面
软浮动条件的设定,在[SETUP. Softfloat](设定-软浮动)画面上进行。该画面由如下2 个画面构成。
- 一览画面
- 详细画面
一览画面和详细画面的切换,通过功能键进行。
按下一览画面的F3“DETAIL”(详细)键 → 进入详细画面
按下一览画面的F3“LIST”(一览)键 → 进入一览画面
软浮动条件在标准情况下至多可以设定10个。
一览画面
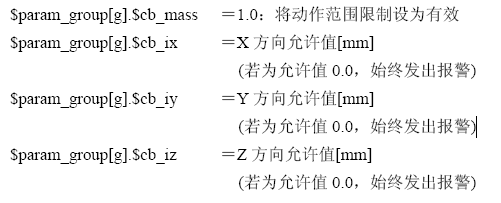
动作范围限制的设定
可限制正交软浮动执行中的动作范围。
根据软浮动条件所指定的坐标上的TCP 指令位置和实际位置的差若超出允许值,将会发出报警而停止。
为了安全目的,在运行执行正交软浮动的程序之前,为了避免干扰周围,请预设以下的系统变量。
系统变量的反映需重新接通电源。
注意/限制事项
使用软浮动功能时,有如下注意/限制事项,应予注意。
1 软浮动功能有效时,有如下限制。
- 示教时的动作路径得不到保证。
- 示教路径随倍率而变化。
- 与通常动作相比,所需操作时间将会延长。
2 进行如下操作时,本功能将自动成为无效。
- 程序执行开始时
- 程序结束时
- 程序因伺服关闭的报警而停止时
- 在程序暂停状态下执行JOG 进给时
- 在程序暂停状态下手动移动光标而再启动程序时
- 执行后退操作时
- 接通电源时
3 程序暂停后再启动时,本功能的有效/无效、以及软浮动开始比率取决于暂停前的状态。但是,在执行上述第2 步操作时,本功能成为无效。
4 不能用软浮动指令以外的指令来将本功能设定为有效。
5 本功能有效时,即使在动作语句位置定为类型中指定“FINE”(定位),机器人也会在“CNT 0”(平顺0)下移动(不会进行到位检测)。
6 本功能有效时,机器人在被外力移动某一距离以上的情况下,会发生下列伺服报警。
- 机器人处在停止状态的情形 “SRVO-023 Stop error excess(G:i A:j)”(伺服-023 停止时误差过大(G:i轴:j))
- 机器人处在动作中的情形
“SRVO-024 Move error excess(G:i A:j)”(伺服-024 移动时误差过大(G:i
轴:j))
7 在处在制动状态下将本功能设定为有效时,制动器将被自动解除,而后,本功能成为有效。
8 本功能有效时,制动器控制无效。
9 动作组的屏蔽为 [*,*,*,*,*](=没有动作组)程序,试图执行软浮动的各指令语句时,会发生如下报警。
“INTP-216 (程序名 行编号) Invalid value for group number”(执行-216(程序名 行编号)组编号错误)
10 本功能处在有效状态下的动作范围,应设定在所需的最小限度内。根据软浮动的比率以及移动距离,重力平衡会发生变化,某些情况下会导致负有重力的轴上下移动。此外,作为动作附加指令使用的情况下,出于相同的理由应将动作范围设定在所需的最低限度内,动作速度应尽量在低速下使用。
11 本功能有效时,通常情况对程序的每一个动作语句执行跟踪处理。可以切换是否通过系统变量$SFLT_DISFUP 来进行该处理。$SFLT_DISFUP 默认值:FALSE
- 设定为“FALSE”的情况下,本功能有效时,在程序的每一动作语句开始时执行跟踪处理
- 设定为“TRUE”的情况下,不对程序的每一动作语句执行跟踪处理。
12 该功能不能在弧焊工具上使用。
13 软浮动开始时、结束时及跟踪时,必须处于不施加外力的状态。若在施加重力以外的外力的状态下,执行软浮动指令,有时机器人会稍有掉落或上升,发出“Stop/Move error excess”(误差过大)或“Softfloat time out”(软浮动超时)的报警。此时,软浮动开始时和结束时,为了避免施加外力,请进行示教点的变更或待机命令的追加等的示教修改。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-788.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 国产机床一直在追赶,但差距好像没变小,无法逾越的坎,是否该放弃?
国产机床一直在追赶,但差距好像没变小,无法逾越的坎,是否该放弃? 螺钉沉孔能放弹垫吗,看完沉孔深度、螺钉头和弹垫厚度,我才恍然大悟
螺钉沉孔能放弹垫吗,看完沉孔深度、螺钉头和弹垫厚度,我才恍然大悟 日本公司做的机加工生产线,代表了当前机加工自动化最高水准!
日本公司做的机加工生产线,代表了当前机加工自动化最高水准! 置物架里隐藏式磁铁吸盘 用来挂钥匙非常好
置物架里隐藏式磁铁吸盘 用来挂钥匙非常好更多最新发布: 技术教程
-
 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
-
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
-
中间介质气化器 IFV(Intermediate Fluid Vaporizer)运行原理、内部构造和高清实物图
-
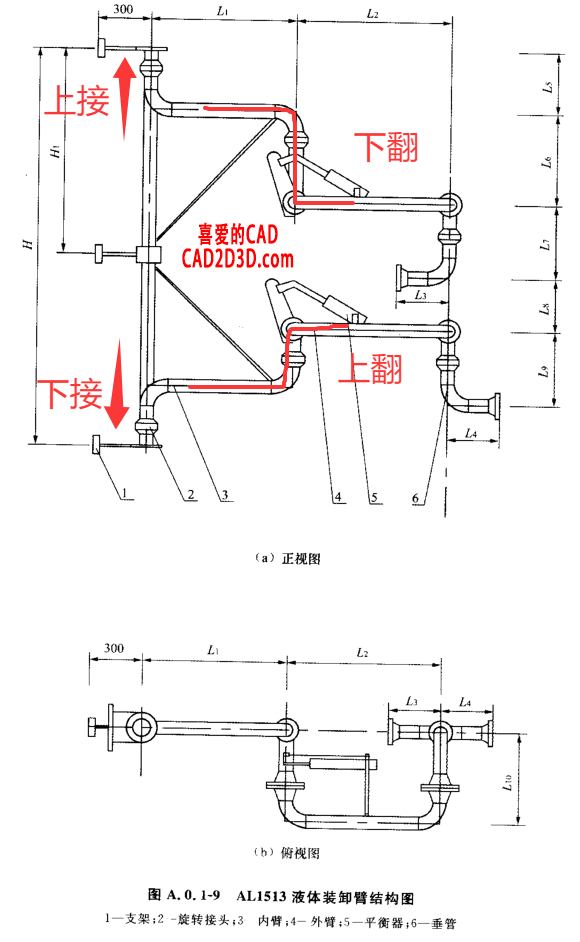 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
-
标准中的 必须、严禁、应、不应、不得、宜、不宜、可 的用词说明
-
SH∕T 3221-2023 石油化工物料汽车装卸设施设计标准有关装卸速度(流速)的要求
-
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
-
GB 50093 自动化仪表工程施工及质量验收规范 温度、压力取源部件安装规定、条文解释说明及案例解析
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载