
 电赛智能小车套件麦克纳姆轮底板四轮机器人2四驱亚克力板底盘4wd
电赛智能小车套件麦克纳姆轮底板四轮机器人2四驱亚克力板底盘4wd  STM32智能视觉小车 麦克纳姆轮底盘 机械臂小车编程搬运机器人C26
STM32智能视觉小车 麦克纳姆轮底盘 机械臂小车编程搬运机器人C26  麦克纳姆轮Mecanum全向轮智能小车配件TT马达电机ROS机器人万向轮
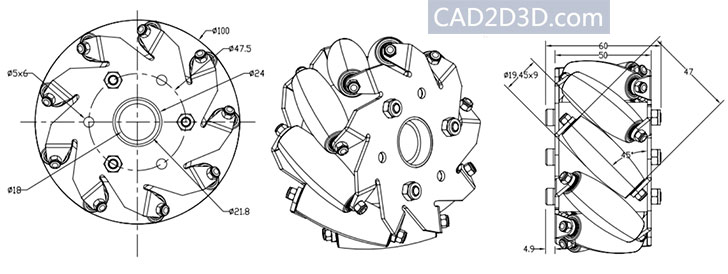
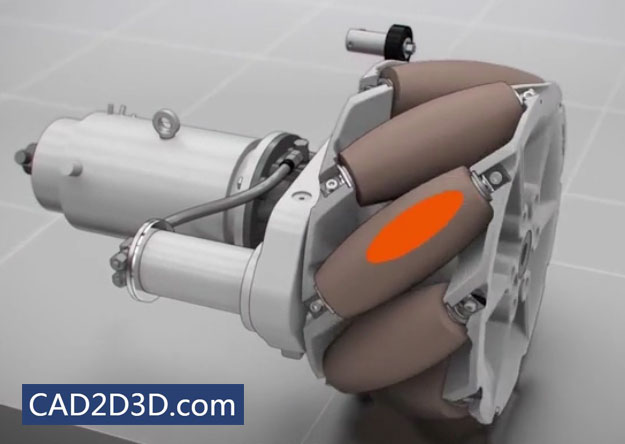
麦克纳姆轮Mecanum全向轮智能小车配件TT马达电机ROS机器人万向轮 麦克纳姆轮,是瑞典麦克纳姆公司设计。在中心轮圆周方向又布置了一圈独立的、倾斜角度(45°)的行星轮,这些成角度的行星轮把中心轮的前进速度分解成X和Y两个方向,实现前进及横行。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
麦克纳姆轮圆周方向布置的周向轮不会转动,受力类似斜齿轮的齿。
麦克纳姆轮淘宝购买地址:点我直接打开淘宝购买

1.0 什么是麦克纳姆轮
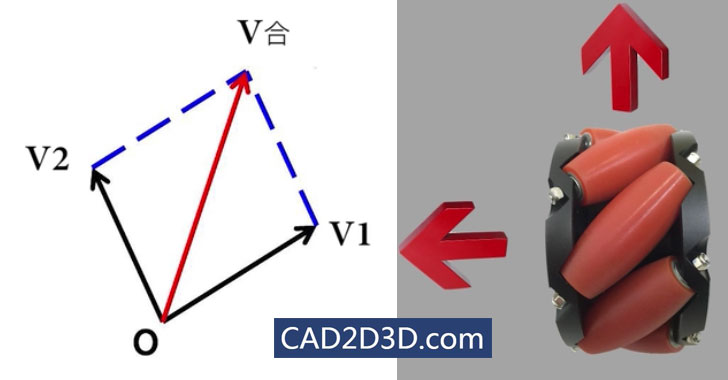
依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。

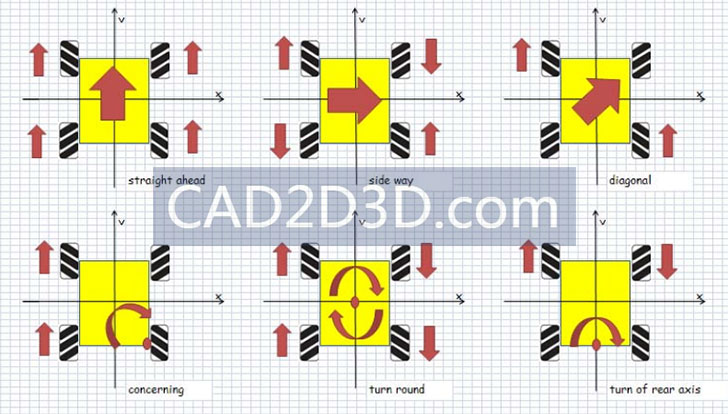
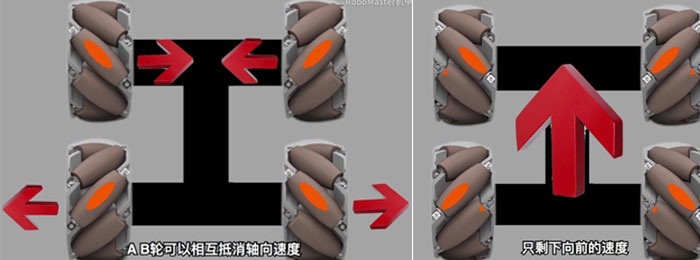
2.0 麦克纳姆轮行走转向原理
四个麦克纳姆轮分别连接到电机上以进行独立控制。 机器人可以像四个普通车轮一样前进,后退和旋转。滚子的配置在45°还允许机器人在任何方向上横向移动并通过它们的组合(即使在旋转!)。我们将力量分成两个向量,一个向前/向后和一个右/左。 当一侧的车轮以相反的方向旋转时,向前和向前旋转向后向量抵消,而两个横向向量加起来。 与之相反另外两个轮子导致四个增加的侧向矢量。
3.0 应用场景


4.0 麦克纳姆轮缺点
麦克纳姆轮受力和行走方向不平行,必然导致垂直方向受力,轮子和地面产生相对滑动,对轮子表面磨损严重。
5.0 视频
输入暗号阅读全文
暗号:
暗号获取方式
关注本站官方微信公众号 科技大爆炸 从0到1,私信回复
暗号993
即可自动获取。
手机扫描下方二维码快速关注公众号科技大爆炸 ↓↓↓

转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post- 993 .html
留言说明:
如对本文有疑问,可关注微信公众号 科技大爆炸 从0到1 直接留言即可。手机扫描下方二维码直接关注 科技大爆炸 从0到1。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
正在加载你可能感兴趣的文章...
 日本不二缓冲器规格书,缓冲器的种类及选型计算方法
日本不二缓冲器规格书,缓冲器的种类及选型计算方法
 钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
 女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
 滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载