
 小型气动SC32大推力带磁SC63标准气缸SC40X50X63X80X100-25-75-S
小型气动SC32大推力带磁SC63标准气缸SC40X50X63X80X100-25-75-S  SC气缸小型气动标准大推力大全带磁32 40 50 63 SC80 100 125 160
SC气缸小型气动标准大推力大全带磁32 40 50 63 SC80 100 125 160  TDA双轴双杆气缸大推力小型气动TN10/16/20/25/32/40-100-20-50-S
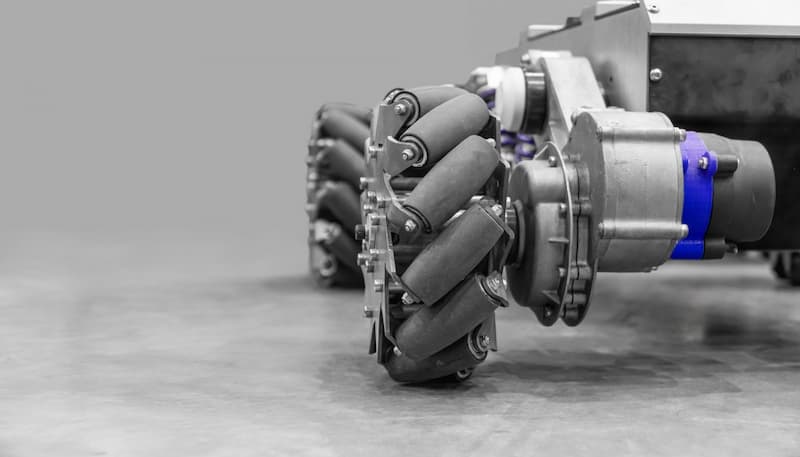
TDA双轴双杆气缸大推力小型气动TN10/16/20/25/32/40-100-20-50-S 日本丰田公司向美国专利商标局提交了一个专利文件,该专利允许每个车轮独立转向 90 度或更大的角度,通过独立控制4个车轮的旋转,实现本身可以朝向任意方向,使车辆可以360度任意移动。

其实车辆可以任意方向移动并不稀奇,因为在AGV(自动导引车)上早已实现,比较常规的实现方式是通过控制4个车轮转向角度来实现,稍微高级一点是采用麦克纳姆轮来实现,麦克纳姆轮本身不能转向,是通过车轮表面的45度滚轴与地面的摩擦力,形成力的 X 分量与 Y 分量不同强度的合成,实现任意转向。
丰田公司的螃蟹行走模式其实就是简单的AGV转向模式,即通过控制4个车轮的角度来实现任意方向行走。
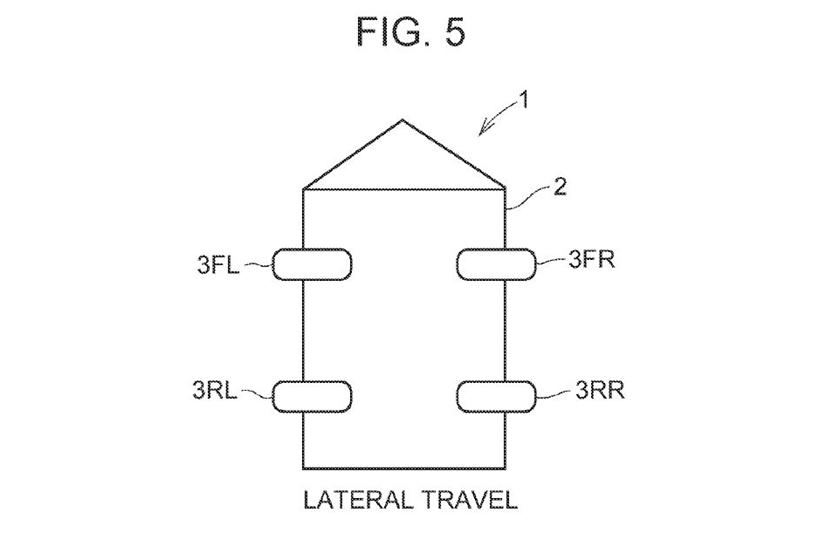
1. 横向行走原理示意图
4个车轮全部旋转90°,即可以实现横向行走。
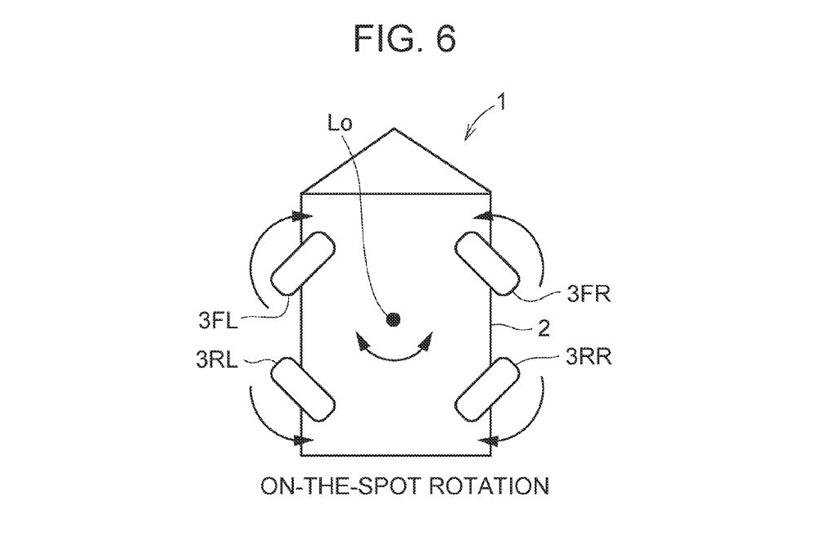
2. 绕中心旋转原理示意图
4个车轮的中心轴相交于一点,即可实现绕该点旋转。
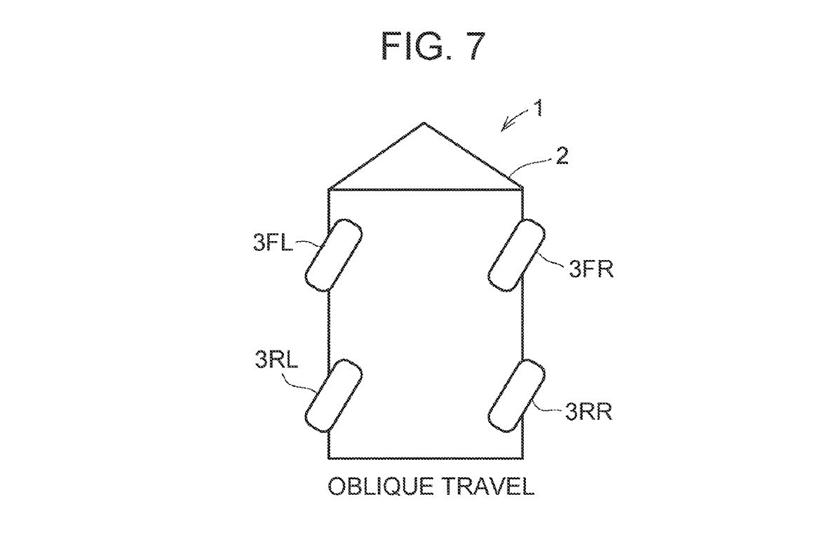
3. 斜走(任意角度直线行走)原理示意图
4个车轮旋转相同的角度,即可实现斜走。
通过丰田给出的原理图,可以推断,此项技术是应用在电动车上面的,4个车轮可以通过电机独立驱动,实现旋转和前进,如果想用内燃机实现上述功能,机械机构将非常复杂,结果肯定是得不偿失。
相对于内燃机驱动,采用电驱动的汽车,能玩出花样的地方有很多,从蒸汽机、内燃机到电气化时代,能源的存在形式发生了翻天覆地的变化,新能源取代传统能源,是大势所趋,我虽然是一名机械工程师,但也不得不承认,电气化确实碾压机械化。
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1727
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1727.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 挡圈卡簧种类及对应的实物图,挡圈卡簧名称中英文对照
挡圈卡簧种类及对应的实物图,挡圈卡簧名称中英文对照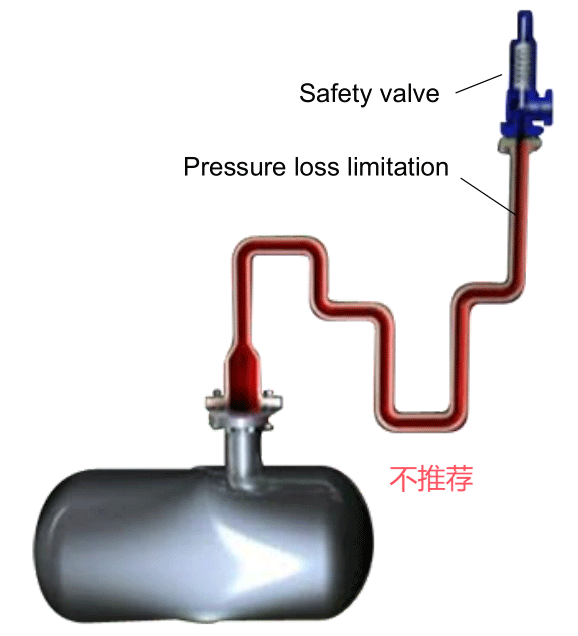 莱斯安全阀安装位置要求及说明
莱斯安全阀安装位置要求及说明 日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮 SMC低回转力矩旋转接头,最多16路压缩空气或真空通道,连续旋转台必备
SMC低回转力矩旋转接头,最多16路压缩空气或真空通道,连续旋转台必备 SICK 3D视觉识别定位 机器人自动取件(连杆乱料取件)
SICK 3D视觉识别定位 机器人自动取件(连杆乱料取件) 日本不二缓冲器规格书,缓冲器的种类及选型计算方法
日本不二缓冲器规格书,缓冲器的种类及选型计算方法
 钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
 滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载