
与
电磁阀 相关商品:
查看所有与
电磁阀 相关商品 >>
 4V210-08气动电磁阀4V110-06气缸换向气阀220V控制阀24v电子阀12V
4V210-08气动电磁阀4V110-06气缸换向气阀220V控制阀24v电子阀12V  亚德客电磁气动阀4V210-08二位五通AC220V线圈换向控制阀组DC24V
亚德客电磁气动阀4V210-08二位五通AC220V线圈换向控制阀组DC24V  德力西电磁水阀1寸控制阀220V常闭型4分全铜直通自来水管开关水阀
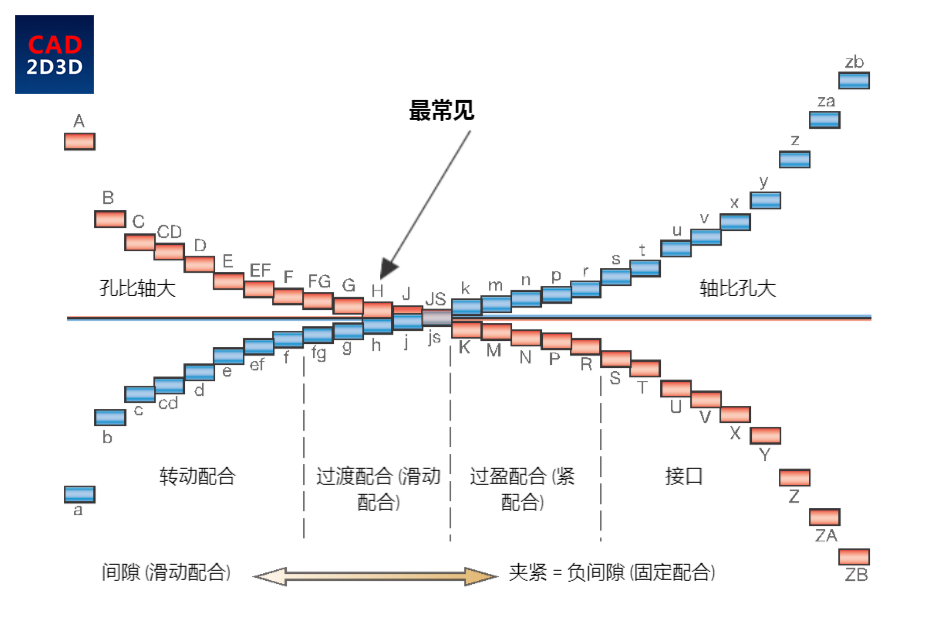
德力西电磁水阀1寸控制阀220V常闭型4分全铜直通自来水管开关水阀 基本偏差的代号用拉丁字母表示,大写代表孔,小写代表轴。轴孔配合关系分为间隙配合、过渡配合、过盈配合。
具体参见GB/T 1800.1-2009 产品几何技术规范(GPS)极限与配合。
转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1296.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 东北超前20年!城市梦碎选择返乡,马大帅大结局也是大多数人的结局
东北超前20年!城市梦碎选择返乡,马大帅大结局也是大多数人的结局 金属圆棒料切割的3种设备
金属圆棒料切割的3种设备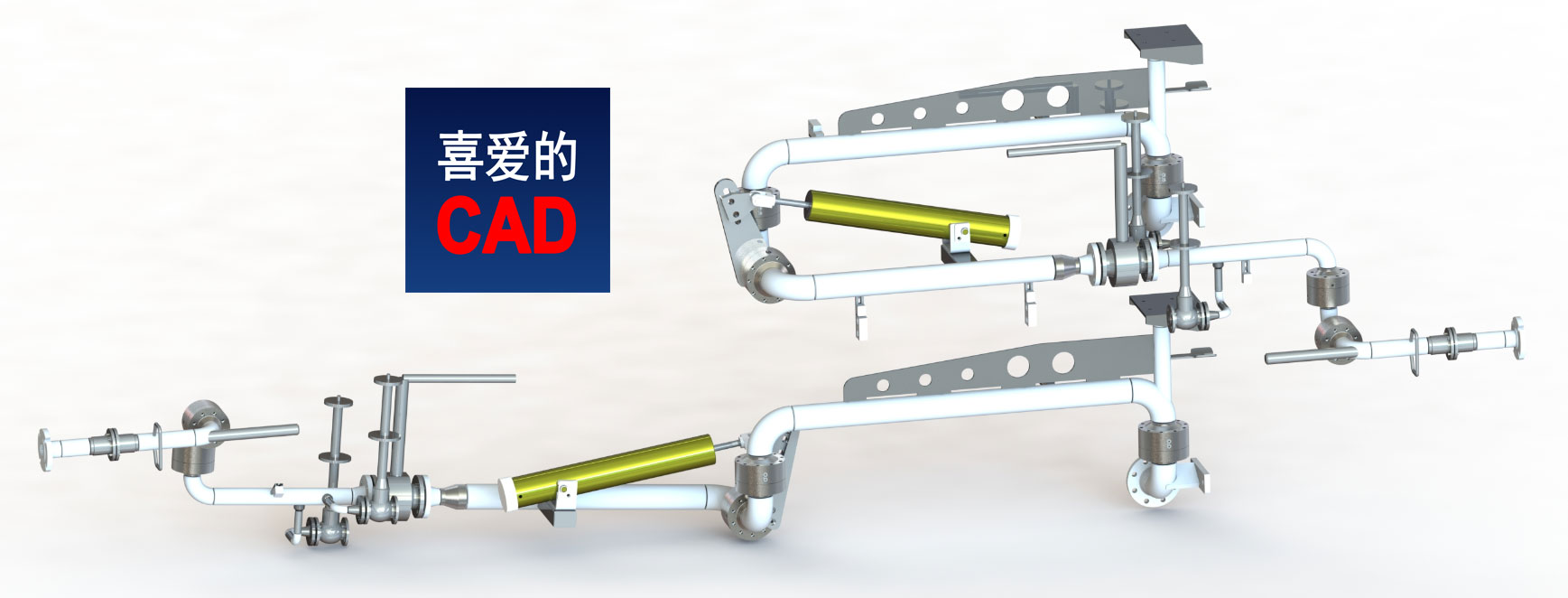 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
 半个世纪前手绘的机械图纸,精致程度吊打现在的机械工程师,机械行业没落了,没有高手入行了
半个世纪前手绘的机械图纸,精致程度吊打现在的机械工程师,机械行业没落了,没有高手入行了
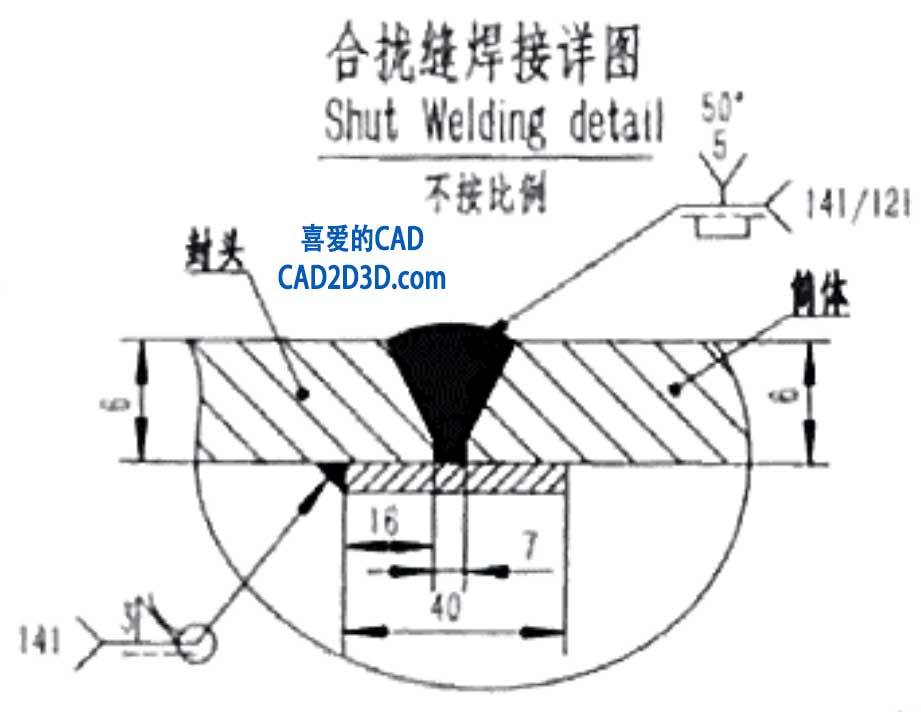 焊缝符号表示法,尺寸标注方法图示,设计院出具的设计图焊缝标注实例,ISO 2553 标注示例
焊缝符号表示法,尺寸标注方法图示,设计院出具的设计图焊缝标注实例,ISO 2553 标注示例
 USB接口类型大全及对应的传输速度,Type C原来也是USB
USB接口类型大全及对应的传输速度,Type C原来也是USB
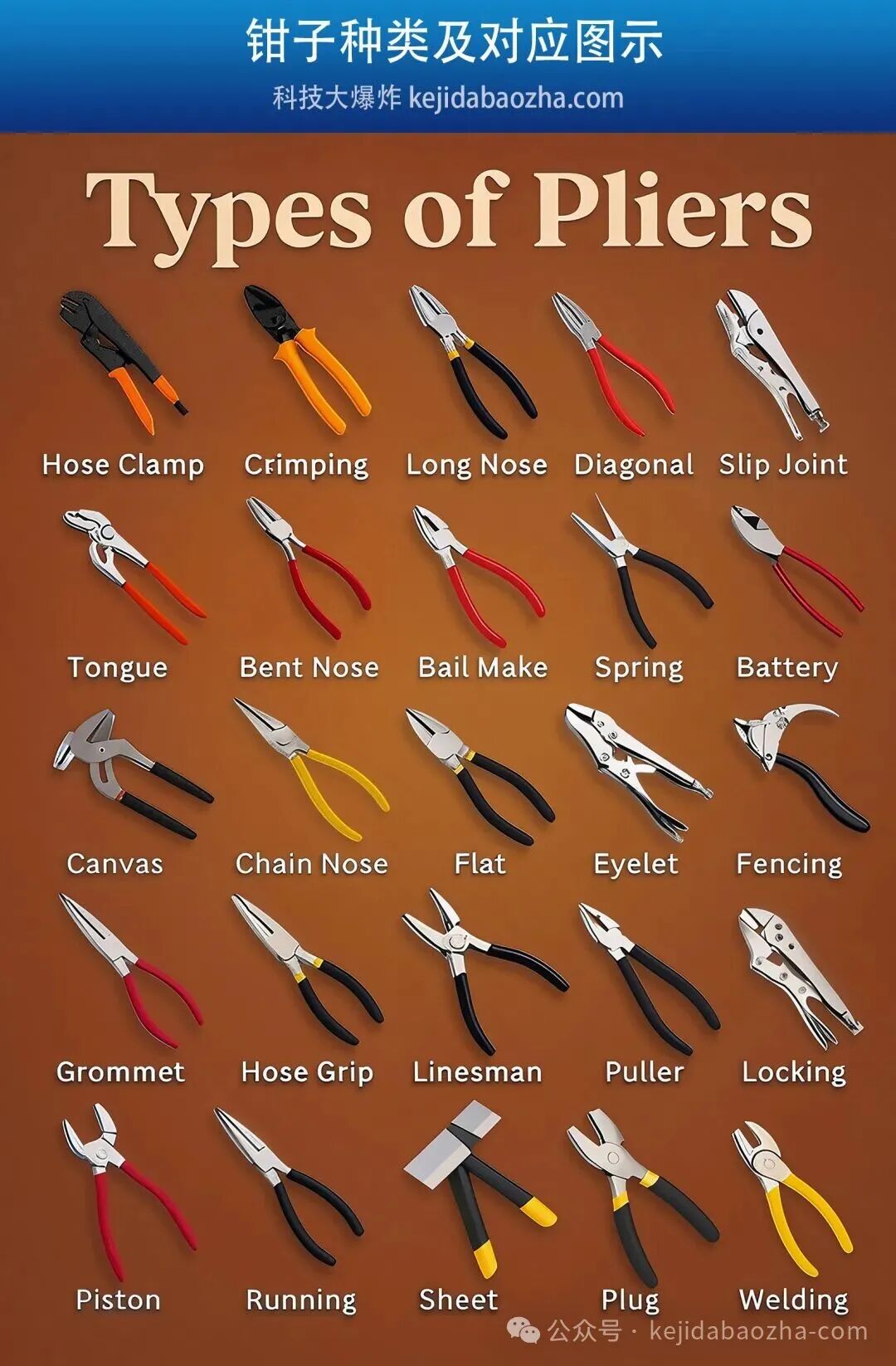 钳子种类及对应图示,各种钳子的中英文名称对照
钳子种类及对应图示,各种钳子的中英文名称对照
 砂轮刀片种类及对应图示,各种砂轮刀片中英文对照
砂轮刀片种类及对应图示,各种砂轮刀片中英文对照
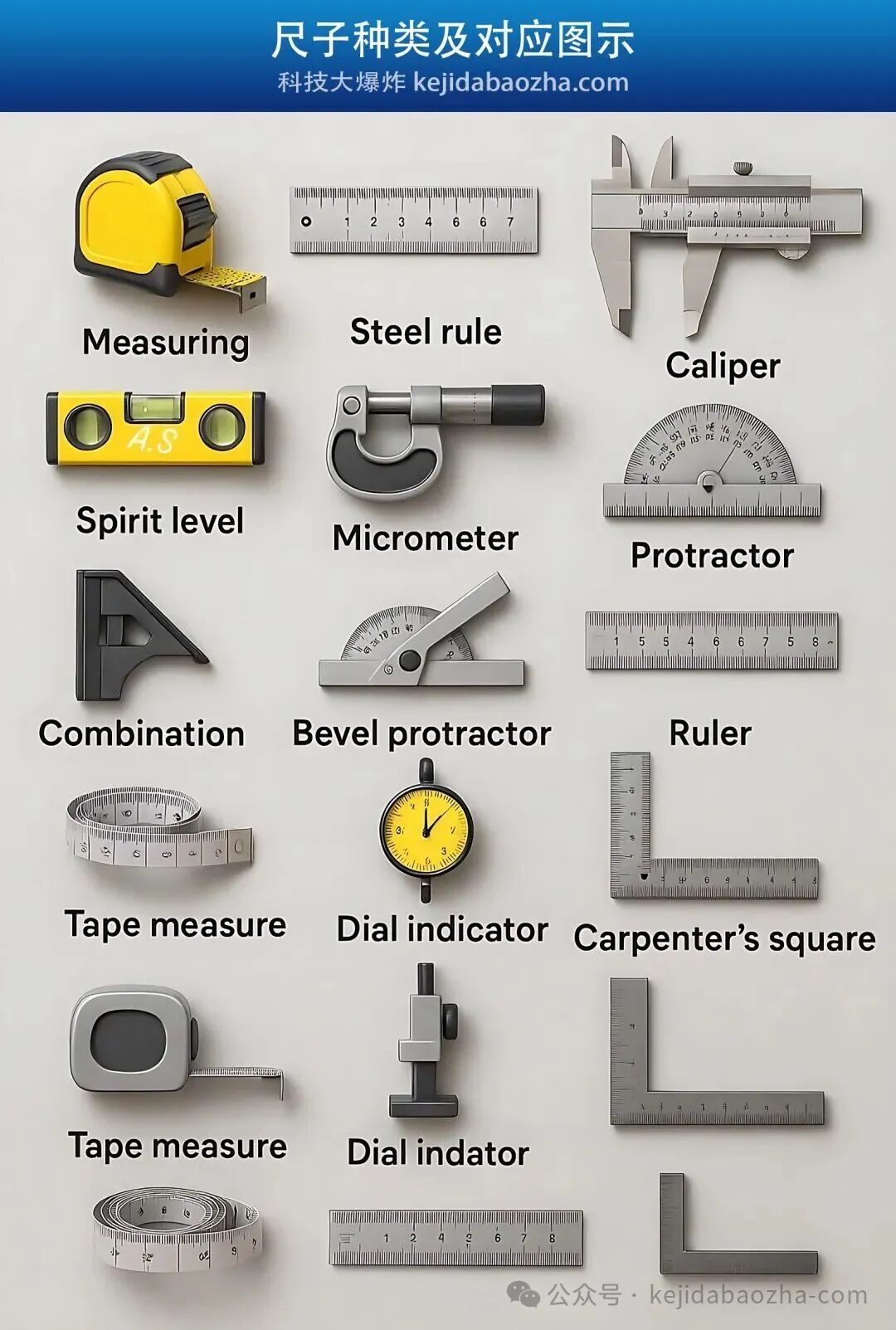 尺子种类及对应图示,各种尺子中英文名称对照
尺子种类及对应图示,各种尺子中英文名称对照
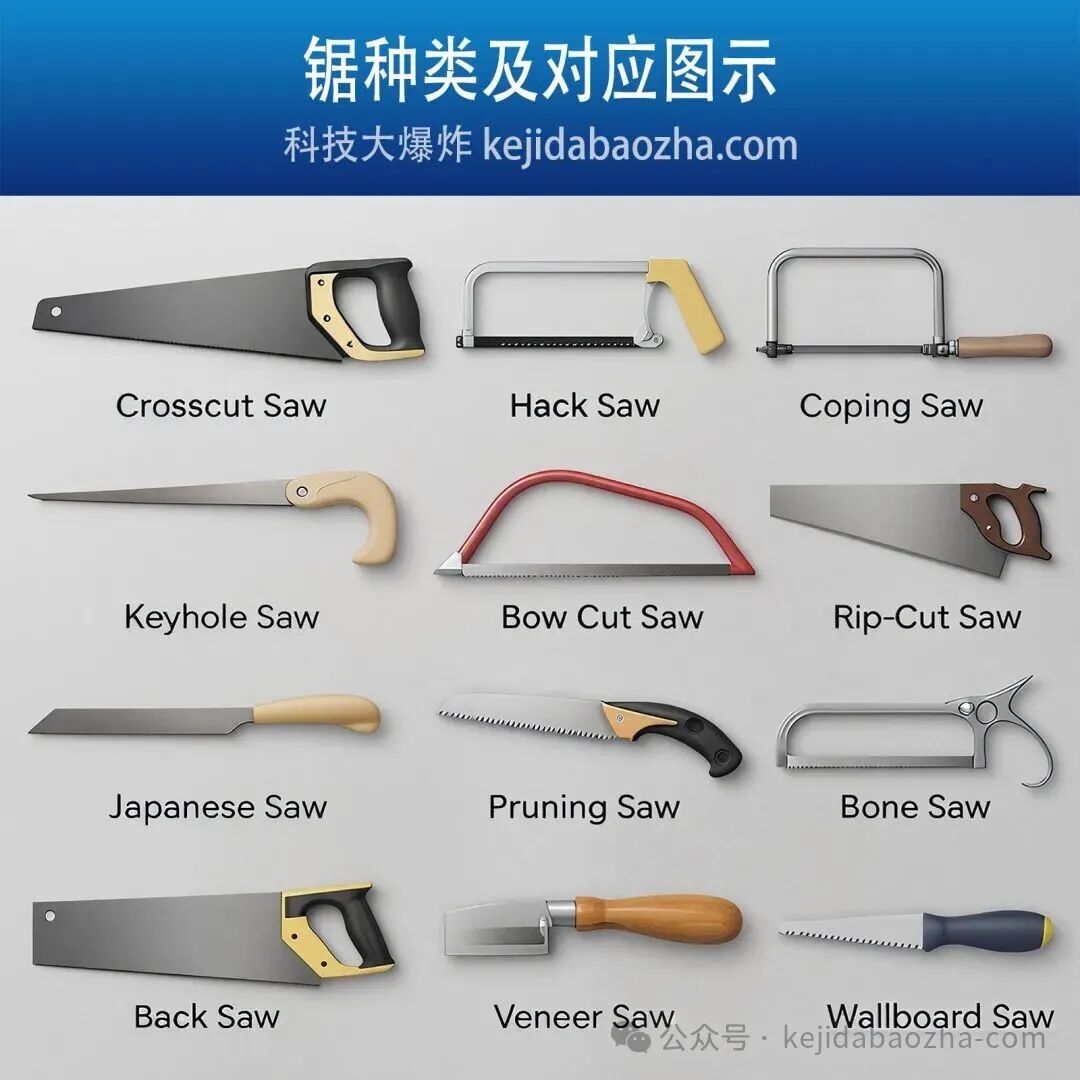 锯的种类及对应图示,各种锯的中英文名称对照
锯的种类及对应图示,各种锯的中英文名称对照
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载