
 3d模型代下溜溜模型下载知末cad模型网代下su模型代下24H自动下载
3d模型代下溜溜模型下载知末cad模型网代下su模型代下24H自动下载  Blender家居室内场景渲染3d模型工程源文件客厅房间沙发设计素材
Blender家居室内场景渲染3d模型工程源文件客厅房间沙发设计素材  Blender人物模型韩国女性3D模型写实美女角色建模带骨骼绑定素材
Blender人物模型韩国女性3D模型写实美女角色建模带骨骼绑定素材 2.5 相机校准
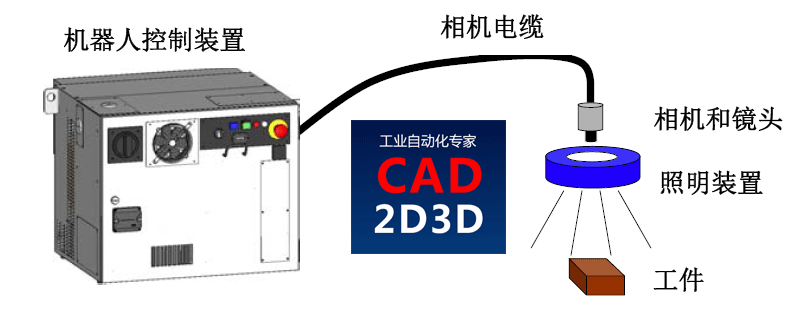
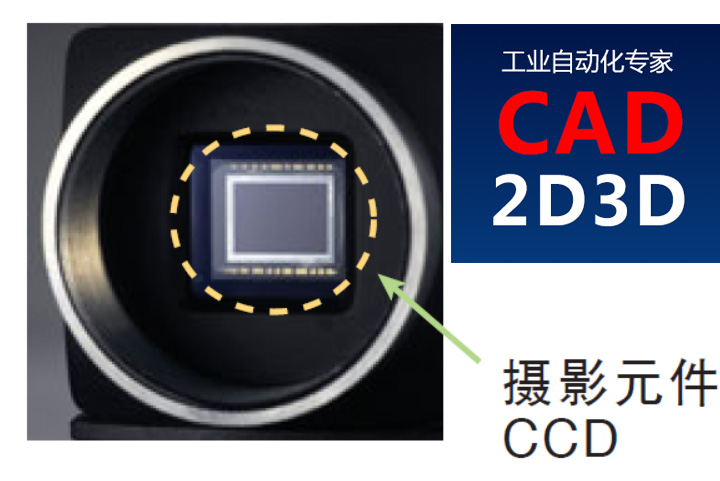
iRVision 利用相机,从所拍摄的图像检测出对象物。要使用iRVision 已检测出的对象物位置,进行机器人的补正,需要将iRVision 检测出的图像上的位置数据变换为符合机器人动作基准的坐标系(用户坐标系、或者工具坐标系)上的位置数据。要进行如此的数据变换,需要有相机在观察哪一个机器人的坐标系,如何进行观察的信息。设定该信息的作业叫做相机的校准。相机的校准,是在使用iRVision 而进行机器人动作补正的应用中十分重要的要素。要正确进行机器人的补正,需要预先正确进行相机的校准。
2.6 关于视觉数据
我们将iRVision 的示教数据叫做“视觉数据”。对iRVision 进行示教,就是创建视觉数据后进行示教。视觉数据,与机器人的程序和I/O 的设定一样,被存储在机器人控制装置内的存储器中
2.6.1 视觉数据的种类
视觉数据,根据其目的分类为如下4 种。
相机:进行连接相机的端口编号、相机的种类、相机的设置方法等设定。
相机校准:进行相机中所拍摄的图像的坐标系和机器人动作的坐标系的相互关联。
视觉程序:设定生产线运转时iRVision 所进行的图像处理等内容。
应用数据:进行应用固有的设定。
2.6.2 能够创建的视觉数据数
利用用户使用的控制装置能够创建的视觉数据数,根据各种要件而会发生变化,不能一概而论。这里提供对用户使用的控制装置能够创建的视觉数据个数进行概算的大致标准。
视觉数据被存储在机器人控制装置的 FROM 中。因此,能够存储视觉数据的容量,随用户使用的控制装置的FROM 的可用容量而不同。指定的选项软件越多,FROM 的可用容量就越小。用户使用的控制装置的FROM 的可用容量,可通过示教器的[STATUS](状态)→[记忆体]进行确认。
机器人控制装置上具有“自动备份功能”这样的功能,机器人程序的全部用户数据的备份,将会被定期地自动保存起来。自动备份的保存目的地标准设定下为FROM(FRA:),标准设定留下最新的2 组。因此,视觉数据的存储中能够使用的容量为(FROM 的可用容量- 1MB)的1/4。
能够创建的视觉数据的个数,随要创建的视觉数据的大小而不同。虽然视觉程序会成为最大的视觉数据,但是,视觉程序的大小,依赖于图形匹配工具等中所示教的模型的大小。视觉程序的大小,小的为几个KB 左右,大的可达几百KB以上。
假设 FROM 的可用容量为10 MB,视觉数据的大小平均为100 KB,则能够在视觉数据的存储中利用的为9 MB 的大约1/4,也即 2.2 MB 部分,能够创建的视觉数据的个数为2.2 MB÷100 KB=22 个左右
2.6.3 创建更多的视觉数据
视觉数据被存储在机器人控制装置的FROM 模块中。当FROM 模块的可用容量不足时,就无法继续创建更多的视觉数据。希望创建更多的视觉数据时,可通过采用如下介绍的任何一种方法增加容量。
将自动备份设为无效
R-30iB/R-30iB Mate 控制装置的标准设定下,设为自动进行程序等的备份。自动备份,标准设定下被保存在FROM 中,留下最新的2 组。通过将自动备份设为无效,就可以创建大约4 倍的视觉数据。有关自动备份功能设定的变更步骤,请参阅“R-30iB/R-30iB Mate 控制装置 操作说明书(基本操作篇)”。
将自动备份目的地变更为 MC:
R-30iB/R-30iB Mate 控制装置的标准设定下,设为自动进行程序等的备份。自动备份,标准设定下被保存在FROM 模块中,留下最新的2 组。将自动备份的保存目的地从FRA:(FROM)变更为MC:(记忆卡),就可以创建大约4 倍的视觉数据。有关自动备份功能设定的变更步骤,请参阅“R-30iB/R-30iB Mate 控制装置 操作说明书(基本操作篇)”。
变更 FROM 模块
R-30iB/R-30iB Mate 控制装置上,作为FROM 模块的大小,提供有3 类,也即32MB、64MB、128MB。通过将用户使用的控制装置的FROM 模块更换为大容量的FROM 模块,就可以创建更多的视觉数据。
2.7 用户坐标系和工具坐标系
机器人的位置和姿势使用坐标系来进行表述。用户坐标系是用户给出定义的用来定义机器人作业空间的坐标系,工具坐标系是用来定义机器人的工具(末端执行器)的位置和朝向的坐标系。工具坐标系的原点,有时也将其特称为TCP(Tool Center Point)。
发那科制的机器人,采用叫做示教重放方式的方式。该方式的机器人,按照所示教的方式再现动作。因此,在一般的机器人系统上,并不将坐标系视为十分重要。即使坐标系有某些不适当之处,机器人也只是重复所示教的动作,因而这不会成为问题。
另一方面,在使用视觉系统的机器人系统上,坐标系则具有重要的意义。譬如,在计算视觉系统“沿着X 方向移动10 mm”或者“绕Z 轴旋转30°”这样的补正量时,机器人“沿着哪个方向移动10 mm”、“以哪一个点为中心旋转30°”,全都依赖于坐标系的定义。
用户坐标系
用户坐标系定义机器人进行作业的空间。进行位置补正时,视觉系统计算的“沿着X 方向移动10 mm”或者“绕Z 轴旋转30°”这样的补正量,以该用户坐标系为基准而予以表述。因此,在使用视觉系统而进行机器人的补正时,正确设定用户坐标系非常重要。用户坐标系的朝向发生偏离,或者原点的位置发生偏离时,机器人会向着与所期望的方向不同的方向移动,或者以与所期望的点不同的点为中心旋转。
2 维视觉系统中,用户坐标系还发挥着另外一个重要的作用。那就是在3 维的现实空间内,定义“进行作业的2 维平面”。在iRVision 的2 维补正应用中,假设进行作业的2 维平面与用户坐标系的XY 平面平行,并以“用户坐标系的Z=OOmm 的平面”这样的形式定义作业平面。
工具坐标系
工具坐标系,表示机器人的工具(末端执行器)的位置和朝向。在使用视觉的机器人系统上,对设定用户坐标系时的TCP(Tool Center Point、工具坐标系的原点)进行正确设定十分重要。在设定用户坐标系时,通过机器人的TCP 来修正用户坐标系的原点、X 轴方向的点、Y 轴方向的点。此时,使用的TCP 位置如果不正确,在其误差的影响下,设定的用户坐标系也将成为不正确的坐标系。
此外,在进行抓取偏差补正时,视觉系统计算的“沿着 X 方向移动10 mm”或者“绕Z 轴旋转30°”这样的补正量,以该工具坐标系为基准予以表述。
用户坐标系的共享化
多台机器人共同进行作业时,需要进行设定以使机器人在物理上共享同一用户坐标系。我们将之叫做用户坐标系的共享化。具体而言,在如下所示的情况下,需要进行用户坐标系的共享化。
- 利用一个补偿数据进行多台机器人的补正。
- 要补正的机器人和具有相机的机器人不同。
在进行用户坐标系共享化时,在所有机器人上使用相同编号的用户坐标系。譬如,机器人1 的5 号用户坐标系和机器人2 的5 号用户坐标系,以物理上成为相同坐标系的方式进行共享化。
动态用户坐标系
也可使用动态用户坐标系进行视觉的补正。但是,需要注意如下制约事项。
- 请在视觉程序的[补正用坐标系]中指定动态用户坐标系的编号。
- 请在相机校准的[基准坐标系]中指定动态用户坐标系以外的用户坐标系的编号。
- 但是,在相机被固定在变位机上等、相机与动态用户坐标系一起移动的情况下,请在相机校准的[基准坐标系]中指定动态用户坐标系的编号。
- 要使得执行视觉检测命令时和执行取得补偿数据命令时的动态用户坐标系的位置相同。换句话说,请勿在从视觉检出直至取得补偿数据的期间内移动动态用户坐标系。
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1577
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1577.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 毫无美感!机械工程师不如3岁小孩!设计图纸奇丑无比!建议将机械专业放到美术学院
毫无美感!机械工程师不如3岁小孩!设计图纸奇丑无比!建议将机械专业放到美术学院 针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理
针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
 发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载