
 梦初手作diy水晶滴胶麻将猫爪挑泡针消泡器气泡小工具美甲点钻笔
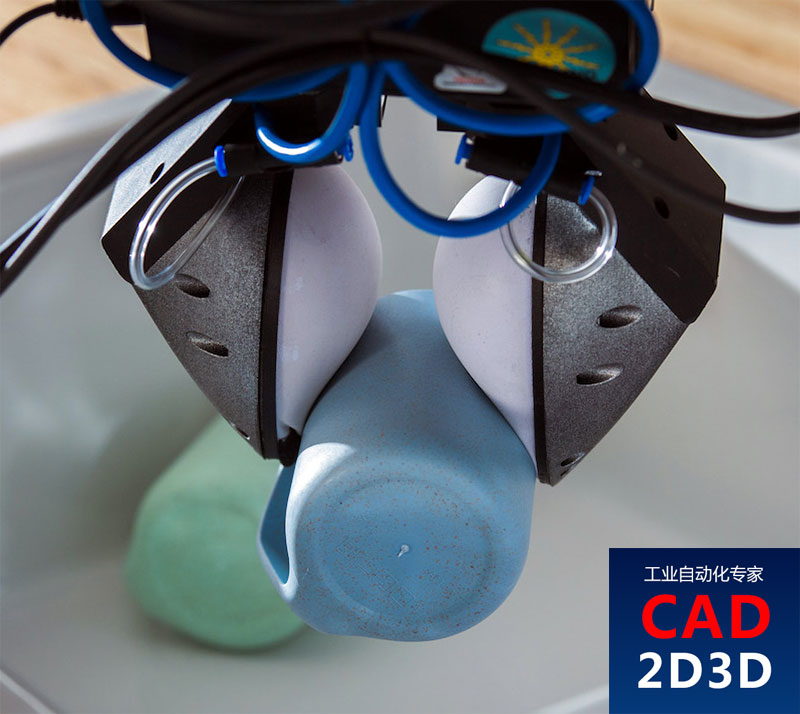
梦初手作diy水晶滴胶麻将猫爪挑泡针消泡器气泡小工具美甲点钻笔 在工业自动化领域,设备的动作都是按照实现写好的程序运行,因此机器人或机械手通常使用的手爪都是刚性手爪,确保点位一致,但在日常生活中,刚性手爪十分危险,显然不合适,因此柔软的气泡手爪就诞生了,气泡手爪里面充气,根据抓取不同外形的物品,并且更安全。
柔软的气泡式手爪可以自动适应物体表面形状,并通过传感器反馈手爪夹持状态。
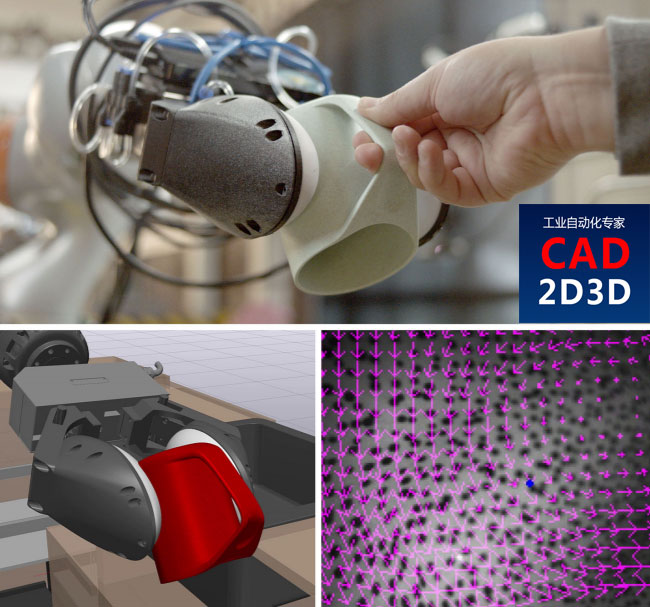
首先将自定义图案沉积到传感器的内表面,通过自定义图案的变形来追踪剪切引起的曼尼普兰郡位移。内部成像传感器捕捉图案距边和角的距离变化,并输出深度图,用来判断手爪夹持状态。
下面是气泡内部的自定义图案,图像传感器检测图案变形。

下面是气泡抓抓取物体时,气泡爪内部传感器跟踪到的剪切变形(右下方)。
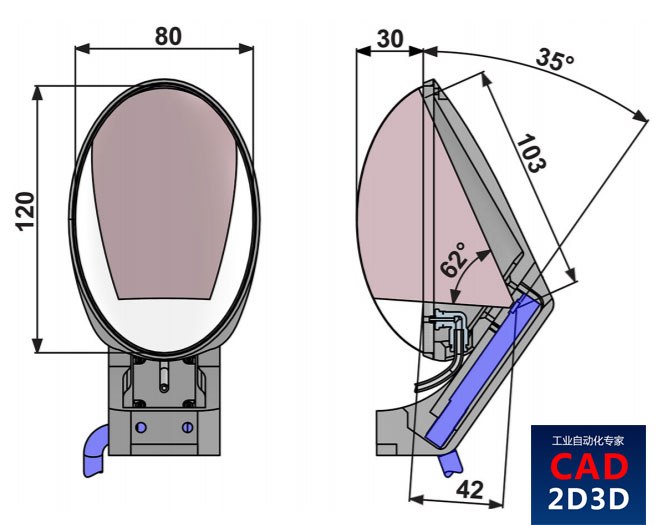
下面是气泡爪内部结构,主要有气泡和图像传感器组成。
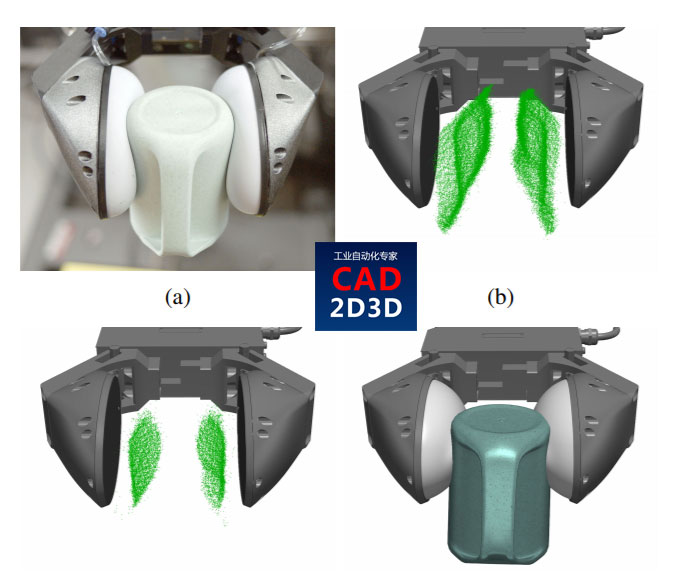
下面是图案点云,图像传感器检测图案变化,形成点云数据,最后判断手爪姿态。
参考文献:https://arxiv.org/pdf/2004.03691.pdf
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站官方微信公众号 科技从0到1,私信回复
暗号1359
即可自动获取。
手机扫描下方二维码快速关注公众号 科技从0到1 ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post- 1359 .html
留言说明:
如对本文有疑问,可关注微信公众号 科技从0到1 直接留言即可。手机扫描下方二维码直接关注 科技从0到1。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
正在加载你可能感兴趣的文章...
 日本不二缓冲器规格书,缓冲器的种类及选型计算方法
日本不二缓冲器规格书,缓冲器的种类及选型计算方法
 钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
 女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
 滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载