
与
物流仓储 相关商品:
查看所有与
物流仓储 相关商品 >>
 快递集包架编织袋撑口支架打包架子建包神器仓储物流分拣装货中转
快递集包架编织袋撑口支架打包架子建包神器仓储物流分拣装货中转  库房仓储货架中重型定制多层加厚快递物流工厂工业承重置物架批发
库房仓储货架中重型定制多层加厚快递物流工厂工业承重置物架批发  塑料托盘九脚吹塑托盘仓库垫板叉车物流防潮板货架仓储板地台卡板
塑料托盘九脚吹塑托盘仓库垫板叉车物流防潮板货架仓储板地台卡板 普通的机械手,每次启动后,都要自动执行一次回原点的动作,所谓的回原点,就是让机械手各轴移动到指定的一个点位,控制系统以此点为基准点,后续程序执行过程中的各点坐标都是以上面的原点位基准,程序中的各点坐标都是相对坐标。
那么机械手为什么要回原点呢,不回行不行?
机械手回原点是因为机械手电机使用的是相对值编码器,电机的旋转度数都是相对的,没有基准点。其实机械手也可以选用绝对值编码器,这样的话,就不存在回原点的问题,但是绝对值编码器价格要贵一些,为了降成本,国内的机械手厂家基本上都选用了相对值编码器。
工业机器人使用的都是绝对值编码器,每个点位的坐标都是唯一的,因此机器人不存在回原点的问题。
下面是常见的机械手横行机构回原点的结构示意图,每次开启,横行机构都要移动到右端的原点位,然后控制系统记录原点位置对应的编码器值,后续所有点位都以此原点位基准点。
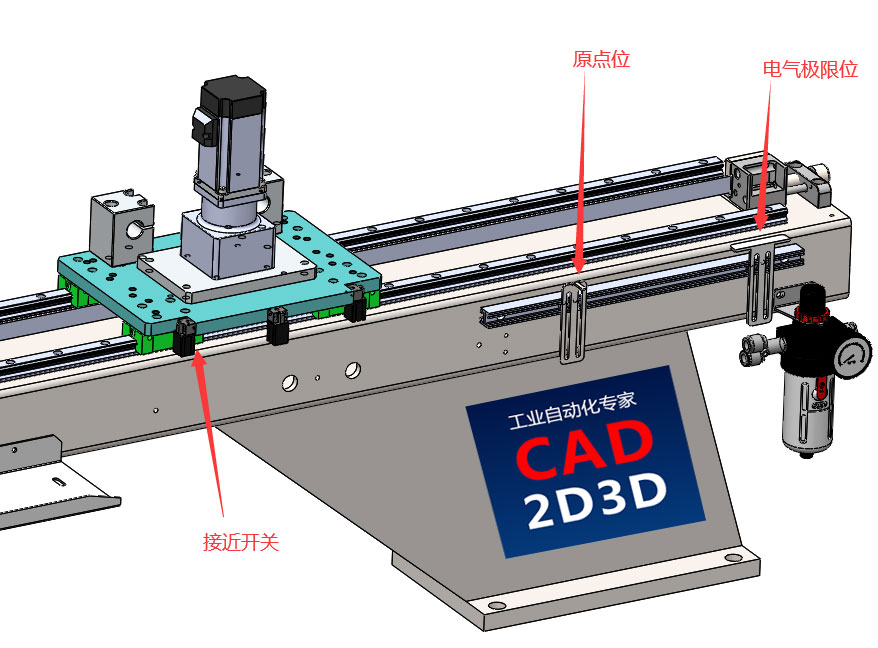
由于回原点使用的是普通的接近开关,实际上每次回原点的位置也存在一定的偏差,导致机械手精度下降。
工业机器人如果出现电池没电或物理撞击等,会造成原点丢失,此时也要执行机器人零点标定,点动控制机器人,将移动人各轴移动到零点位置,并重新记录零点位置。

总之,是否回原点,是由编码器的类型决定的,使用相对编码器,为了安全可靠,每次启动都要执行回原点,而绝对值编码通常情况下都不需要回原点。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1418.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




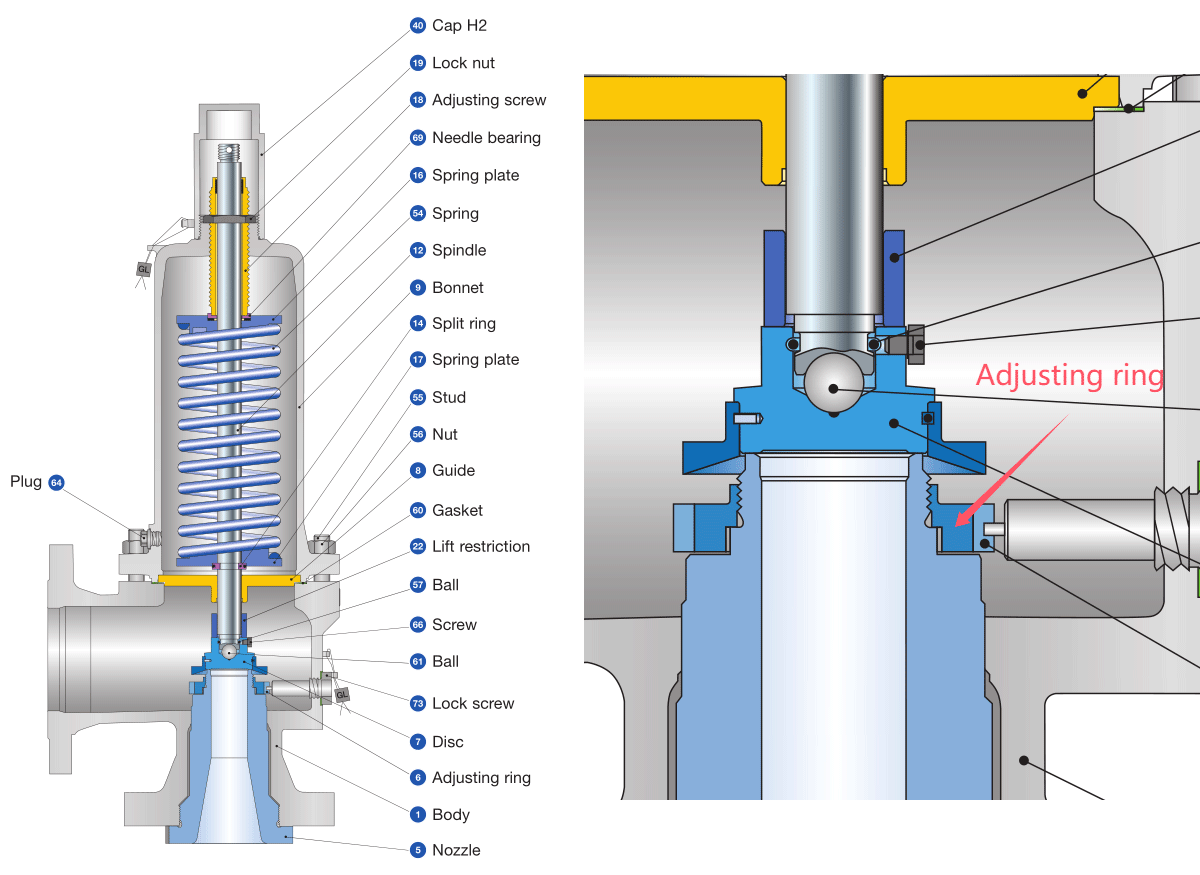 装车橇设计大师:安全阀构造、选型和安装
装车橇设计大师:安全阀构造、选型和安装 标准机器人单元组成要素,机器人装配自动化案例视频
标准机器人单元组成要素,机器人装配自动化案例视频 输送线上工件连续快速翻转装置—连续翻转轮
输送线上工件连续快速翻转装置—连续翻转轮 鸡蛋加工蛋清和蛋黄全自动分离流水线
鸡蛋加工蛋清和蛋黄全自动分离流水线 被淘汰的开口弹簧垫圈,电气工程师如获至宝,防爆接线箱使用弹簧垫圈合理吗?
被淘汰的开口弹簧垫圈,电气工程师如获至宝,防爆接线箱使用弹簧垫圈合理吗?
 超低温电缆的内部构造和性能参数,LNG罐内泵超低温电缆详述
超低温电缆的内部构造和性能参数,LNG罐内泵超低温电缆详述
 日本真空发生器空吸入流量大于消耗量,气越用越多,永动机来了?
日本真空发生器空吸入流量大于消耗量,气越用越多,永动机来了?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载