摆动缸、凸轮和杠杆任意变速直线运动机构
摆动 缸 、 凸 轮 和 杠杆 任意 变速 直线 运动 机 构
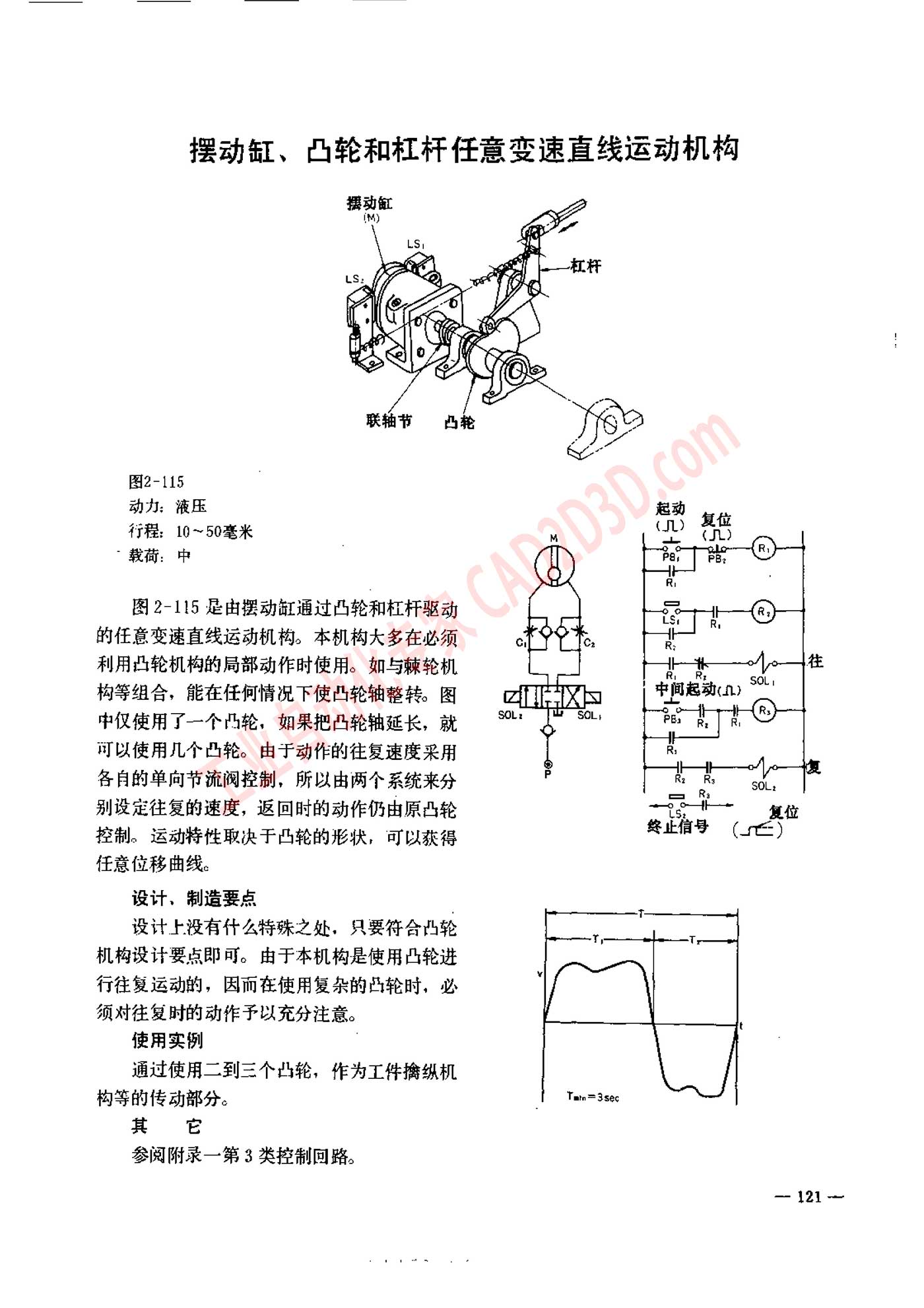
图 2-115
动力 , 液压
行程 ,10~50 豪 米
- 载荷: 中
图 2-115 是 由 摆动 缸 通过 西 轮 和 杠杆 驱动
的 任意 变速 直线 运动 机 构 。 本 机 构 大 多 在 必须
利用 节 轮 机 构 的 局 部 动作 时 使 用 。 如 与 琼 轮机
构 等 组 合 , 能 在 任何 情况 下 使 凸轮 轴 整 转 。 图
中 仅 使 用 了 一 个 凸轮 , 如 果 把 西 轮轴 延长 , 就
可 以 使 用 几 个 凸轮 。 由 于 动作 的 往复 速度 采用
各 自 的 单 向 节 流 阀 控制 , 所 以 由 两 个 系统 来 分
别 设 定 往复 的 速度 ,返回 时 的 动作 仍 由 原 凸 轮
控制 。 运动 特 任 取决 于 凸轮 的 形状 , 可 以 获得
任意 位 移 曲线 。
设计 , 制 造 要 点
设计 上 没有 什么 特殊 之 处 , 只 要 符合 凸轮
机 构 设 计 要 点 即 可 。 由 于 本 机 构 是 使 用 凸轮 进
行 往复 运动 的 , 因 而 在 使 用 复杂 的 凸轮 时 , 必
须 对 往复 时 的 动作 予以 充分 注意 。
使 用 实例
通过 使 用 二 到 三 个 贞 轮 , 作 为 工件 擒 纵 机
构 等 的 传动 部 分 。
其 它
参阅 附录 一 第 3 类 控制 回路 。
— 121 —
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)