
与 工装夹具 相关商品:
查看所有与 工装夹具 相关商品 >>
 推拉快速夹GH301BM GH301AMSS GH301AL不锈钢 测试架工装夹具压夹
推拉快速夹GH301BM GH301AMSS GH301AL不锈钢 测试架工装夹具压夹
 快速夹具夹钳压紧器快速工装夹具36204M锁紧器36202M 36224M
快速夹具夹钳压紧器快速工装夹具36204M锁紧器36202M 36224M
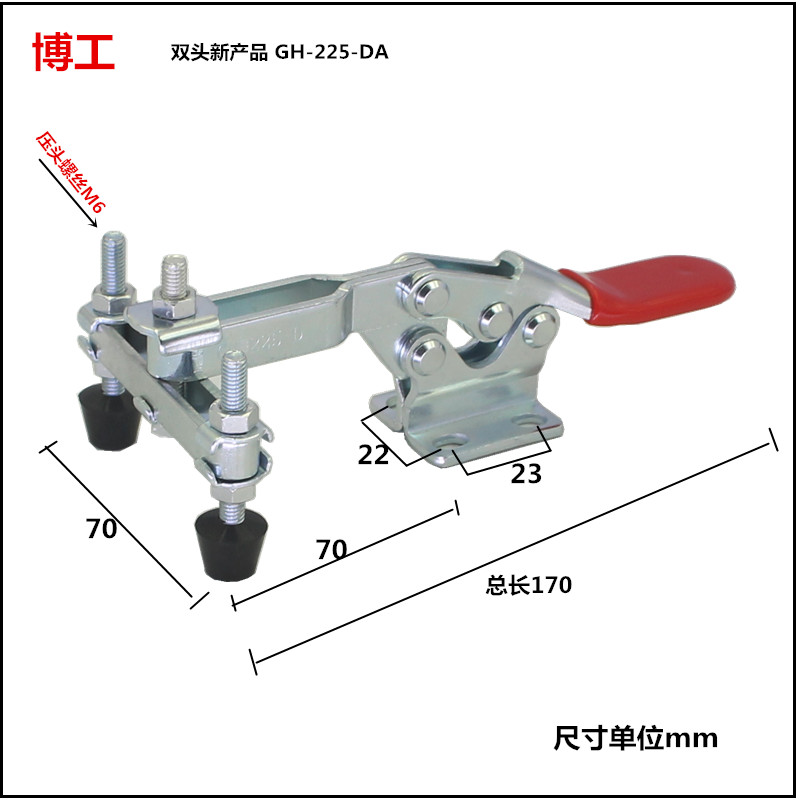 新品 首单优惠 双头快速夹具 水平式夹钳 GH 225D 工装夹具压紧器
新品 首单优惠 双头快速夹具 水平式夹钳 GH 225D 工装夹具压紧器
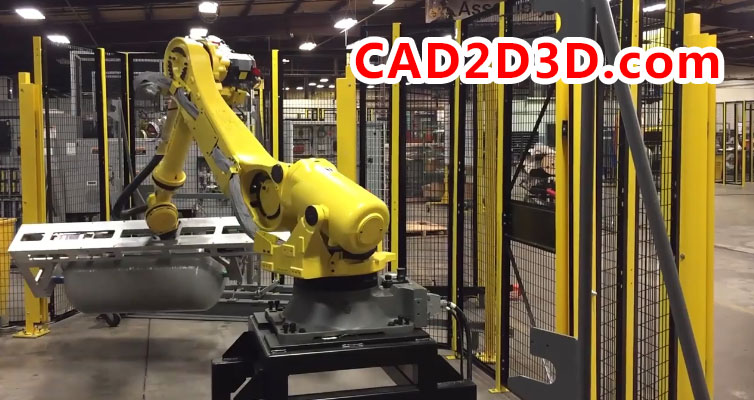
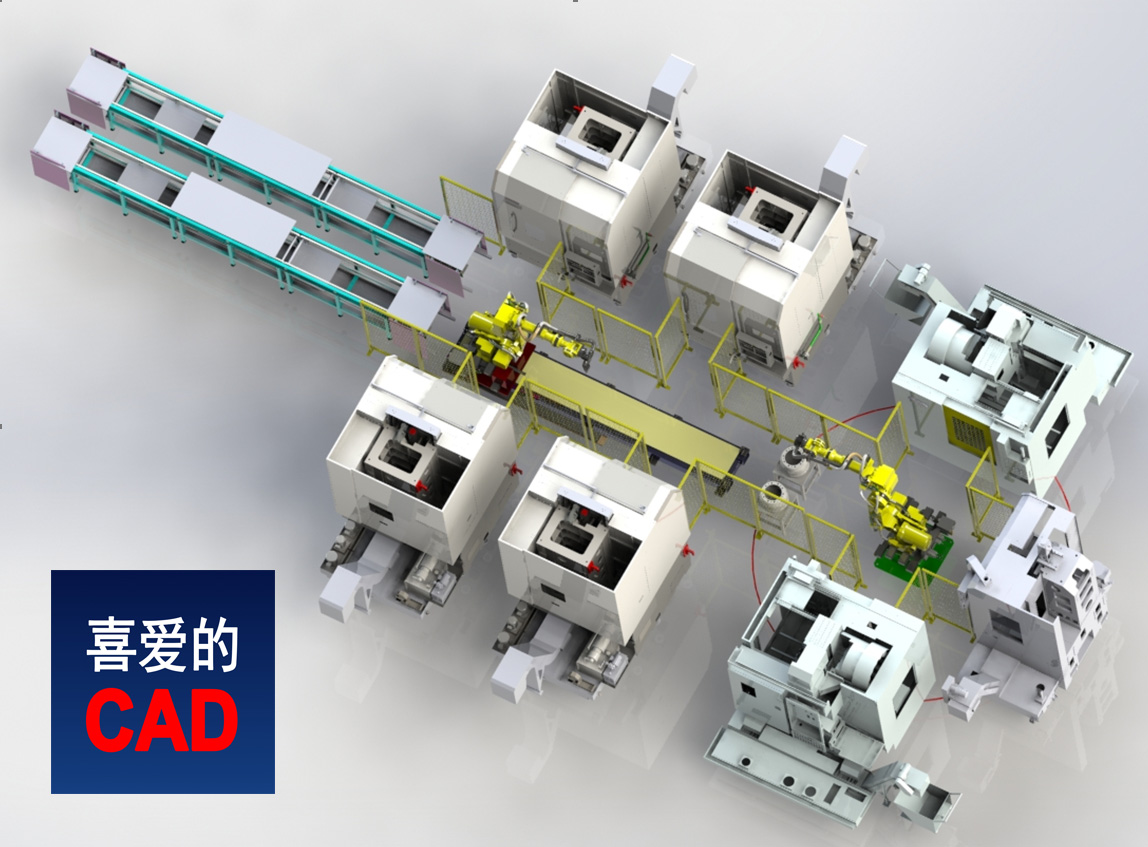
储罐转运挂链,机器人会测量储罐的长度和直径,手爪自动调整开度,实现准确抓取。
机器人控制系统测量悬挂链速度及挂钩位置,机器人利用链速追踪功能,达到机器人和悬挂链同步运动,实现在挂件的时候,工件和链条保持相对同步,从而实现准确挂件。

留言说明
如对本文有疑问,可关注微信公众号 科技大爆炸TheBigBang 直接留言即可。
手机扫描下方二维码直接关注 科技大爆炸TheBigBang。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com
转载请注明:
文章作者:任鸟飞 原文链接:https://www.cad2d3d.com/post-1217.html



 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 看到我们的机器人原点标识线,只剩苦笑,差距还很大,路还很长
看到我们的机器人原点标识线,只剩苦笑,差距还很大,路还很长
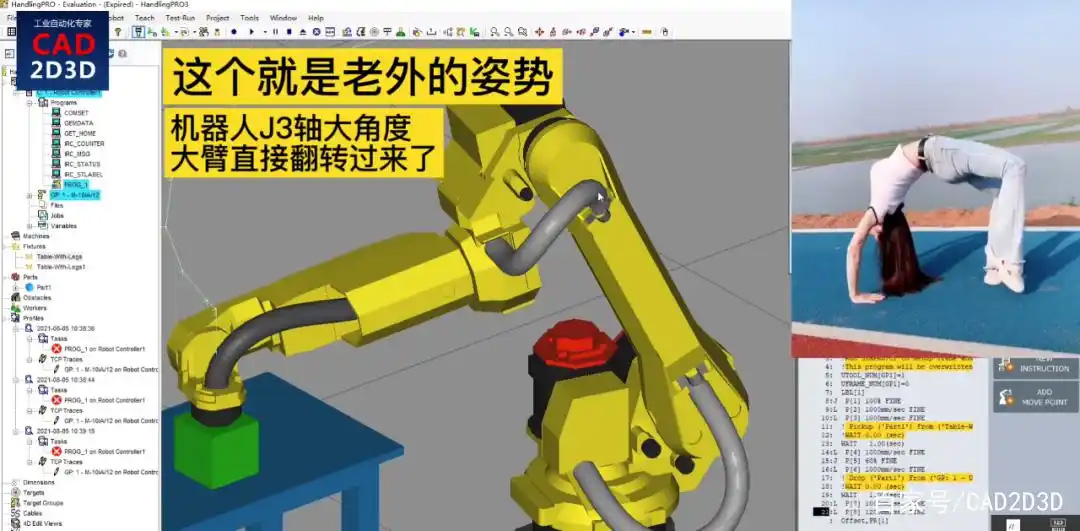 机器人能从屁股后面取放件吗?看到老外的设计我彻底傻眼了
机器人能从屁股后面取放件吗?看到老外的设计我彻底傻眼了
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 汽车一看就懂 汽车构造与原理从入门到精通
汽车一看就懂 汽车构造与原理从入门到精通 AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 科技从一颗螺丝钉开始,看似简单的螺丝钉,可惜有几个人用对了?
科技从一颗螺丝钉开始,看似简单的螺丝钉,可惜有几个人用对了? 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载