
 国行正品 Apple/苹果 iPhone 14/苹果14/13/12全网通手机三期免息
国行正品 Apple/苹果 iPhone 14/苹果14/13/12全网通手机三期免息  2026年新品上市huami小米粿17ultra智能国补未拆封红米K70Pro手机
2026年新品上市huami小米粿17ultra智能国补未拆封红米K70Pro手机 针对中大型折弯件自动化折弯编制以下设计方案。
1 设计依据
- 产品外形:薄板,最大尺寸不超过2800mm×1200mmX2.5mm。
- 工件重量:重量≤100kg。
2 系统构成
本系统由1台FANUC R-2000iB/210F机器人、机器人电动地轨、定位桌、换手架、一台折弯机、安全围栏、安全光栅等组成。
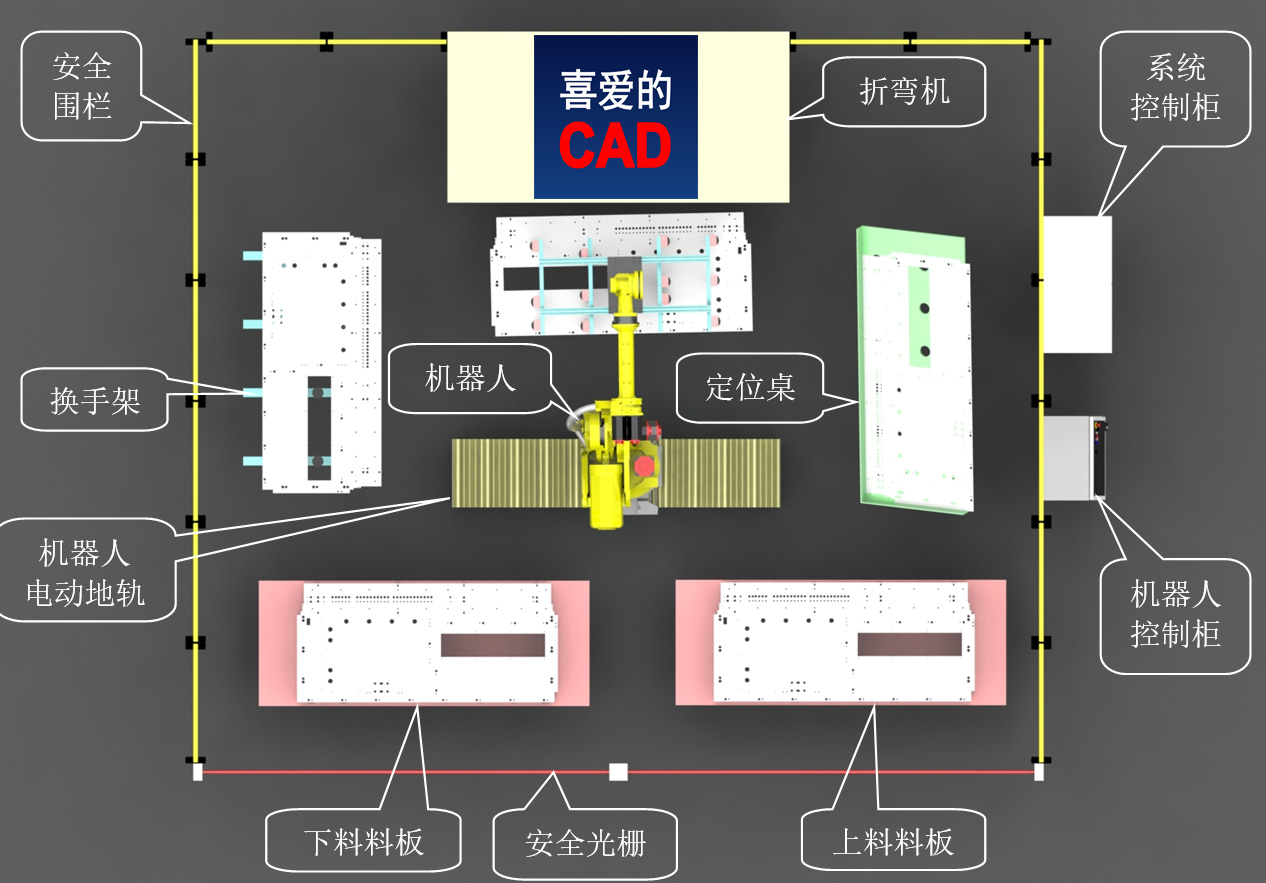
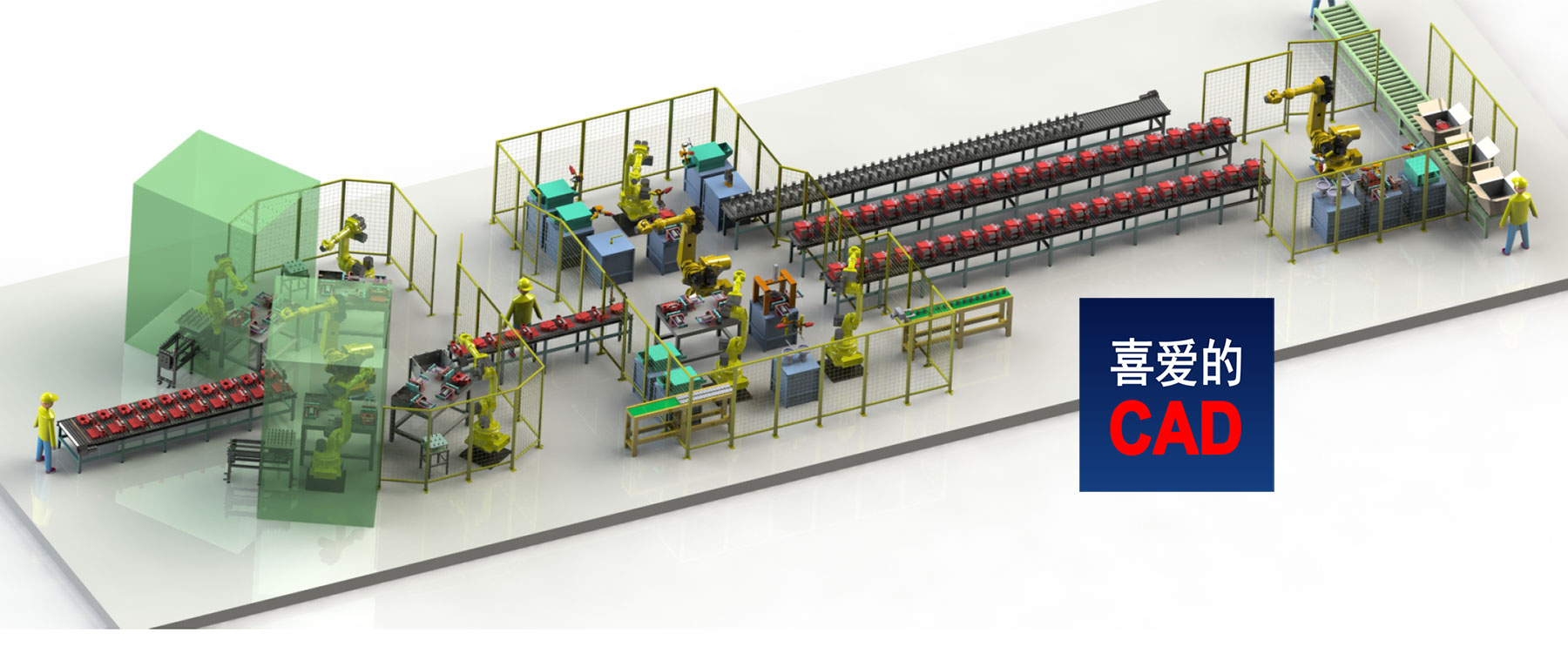
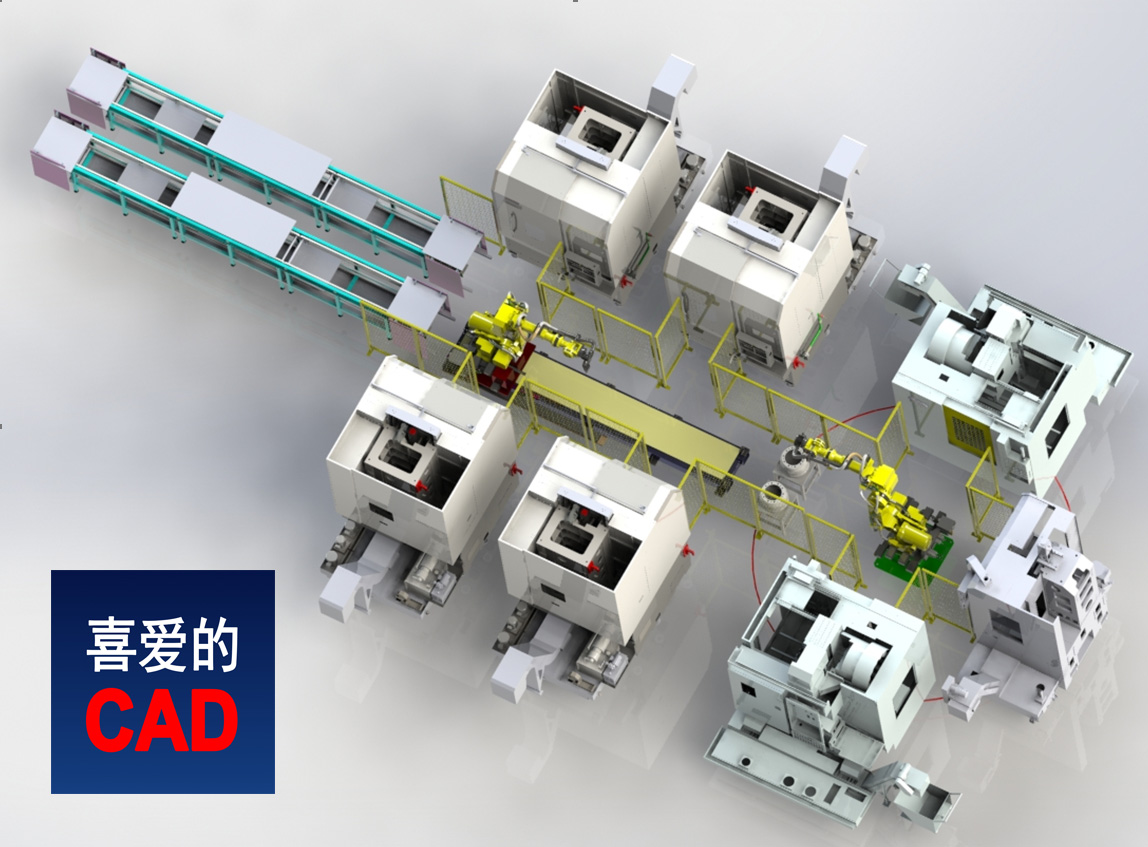
图1 钣金折弯机器人上下料自动化单元布局图
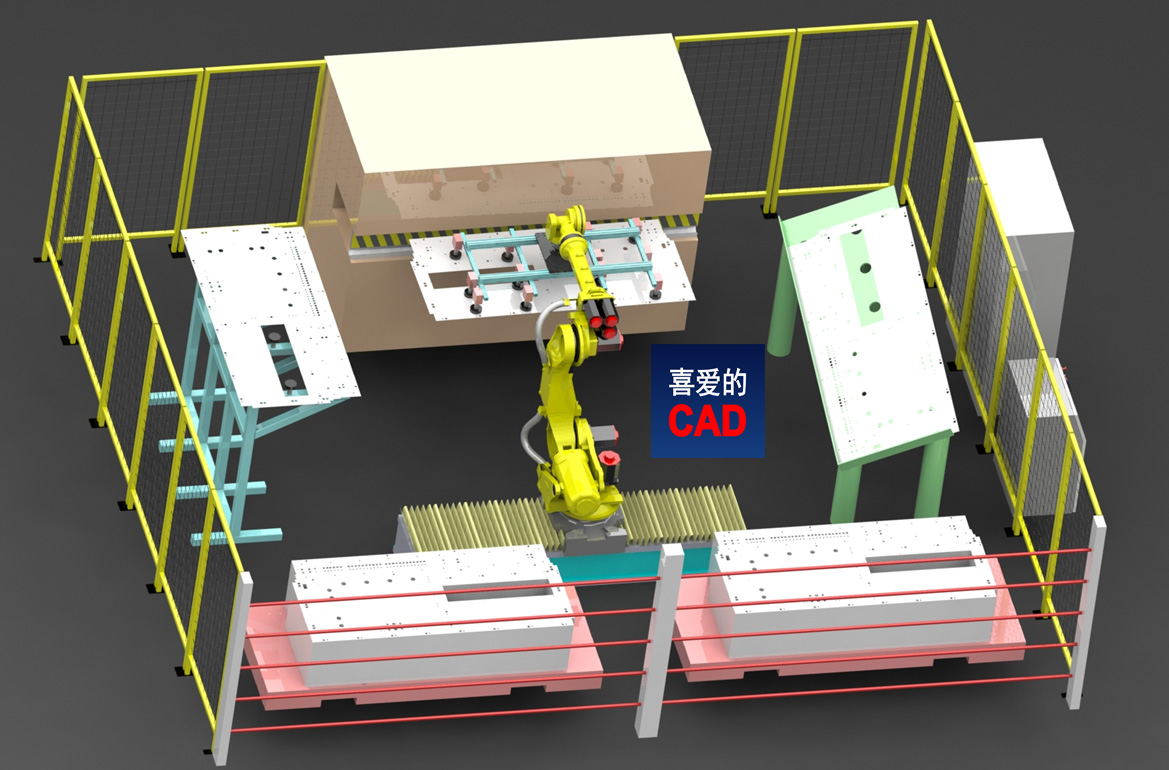
图2 钣金折弯机器人上下料自动化单元三维设计效果图
工人用叉车将摆满工件的上料料板和空的下料料板叉放至指定位置,退出机器人工作区域。
机器人从上料料板上吸取工件,放至定位桌上,松开工件,工件被定位桌定位。
机器人将定位完成的工件吸取至折弯机进行折弯。当需要更换工件的吸取位置时,机器人将工件放至换手架上进行换手,依次循环直至折弯完成。
机器人将折弯完成的工件放至下料料板,开始加工下一个工件。
当上料料板的工件被取光后,机器人停机报警,通知工人前来更换新的上下料料板。
3 设备清单
表1 钣金折弯机器人上下料自动化单元设备清单表
| 序号 | 描述 | 数量 | 功能 |
| 1 | FANUC R-2000iB/210F 固定安装机器人 | 1 | 功能手爪安装及空间运动 |
| 2 | FANUC R-2000iB/210F机器人控制器 | 1 | 机器人本体控制柜 |
| 3 | 机器人手爪 | 1 | 工件抓取 |
| 4 | 定位桌 | 1 | 工件定位 |
| 5 | 换手架 | 1 | 机器人调整姿势时工件暂存 |
4 主要设备描述
4.1 机器人手爪
机器人手爪的示意图如上图所示,由法兰盘、主梁、吸盘安装梁、吸盘等组成。
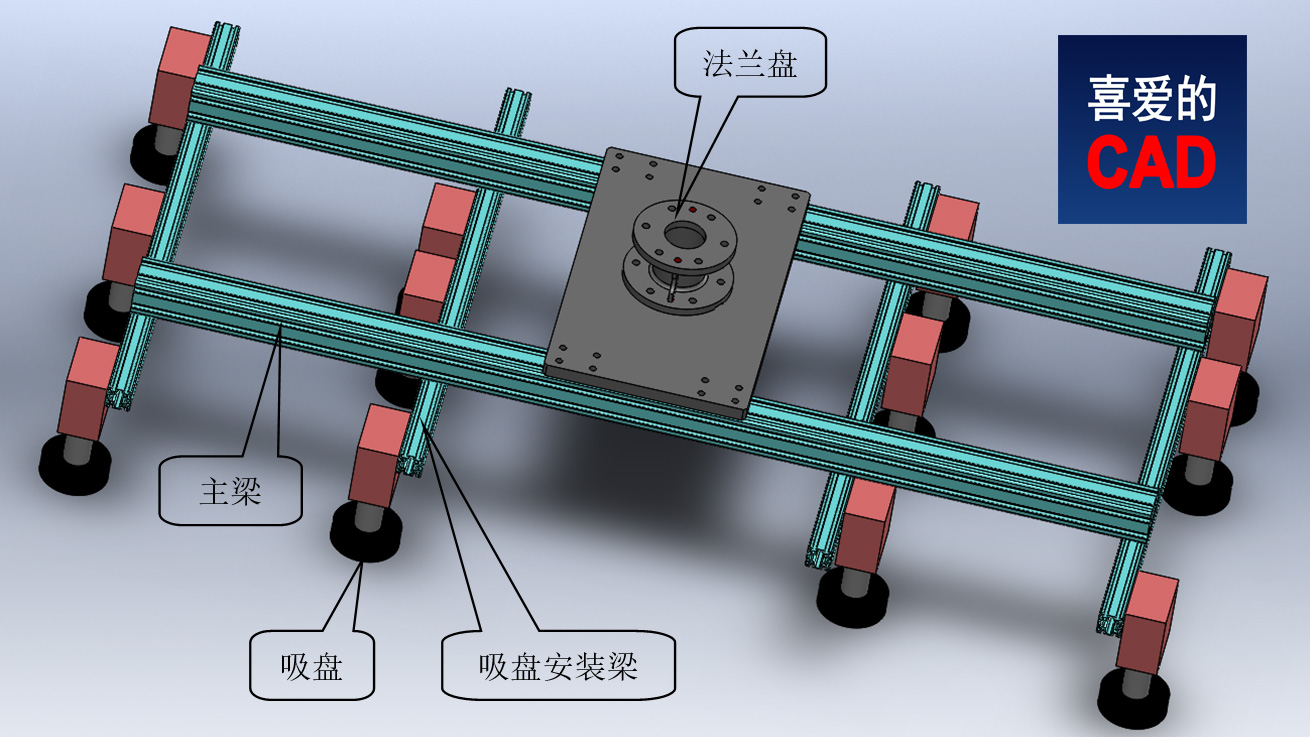
图3 钣金折弯机器人手爪
吸盘可以在吸盘安装梁上移动,吸盘安装梁可以在主梁上移动,使得吸盘可以在一个平面上的XY方向任意摆放。同时可以根据不同工件的具体尺寸实现吸盘的单独关闭。这些设计使机器人手爪适应多种工件。负压检测装置可以检测工件在手爪上是否脱落,确保安全。
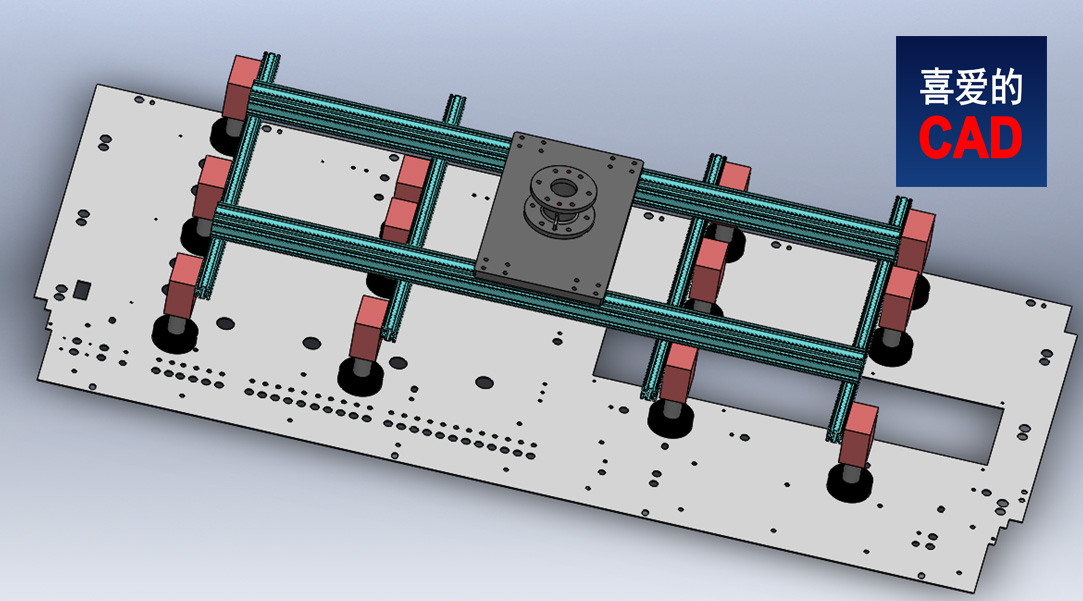
图4 钣金折弯机器人手爪
4.2 定位台
定位台的示意图如上所示,工件可以在定位桌上沿XY两个方向的斜坡自动滑动至一角,从而进行定位。
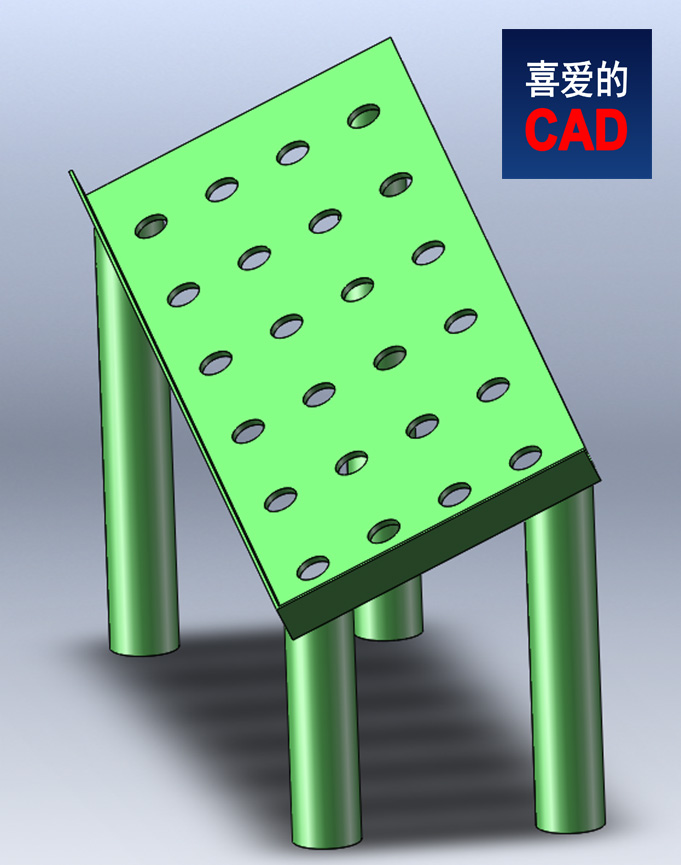
图5 钣金折弯定位台
4.3 换手架
换手架 的示意图如上图所示,由支架、吸盘等组成。
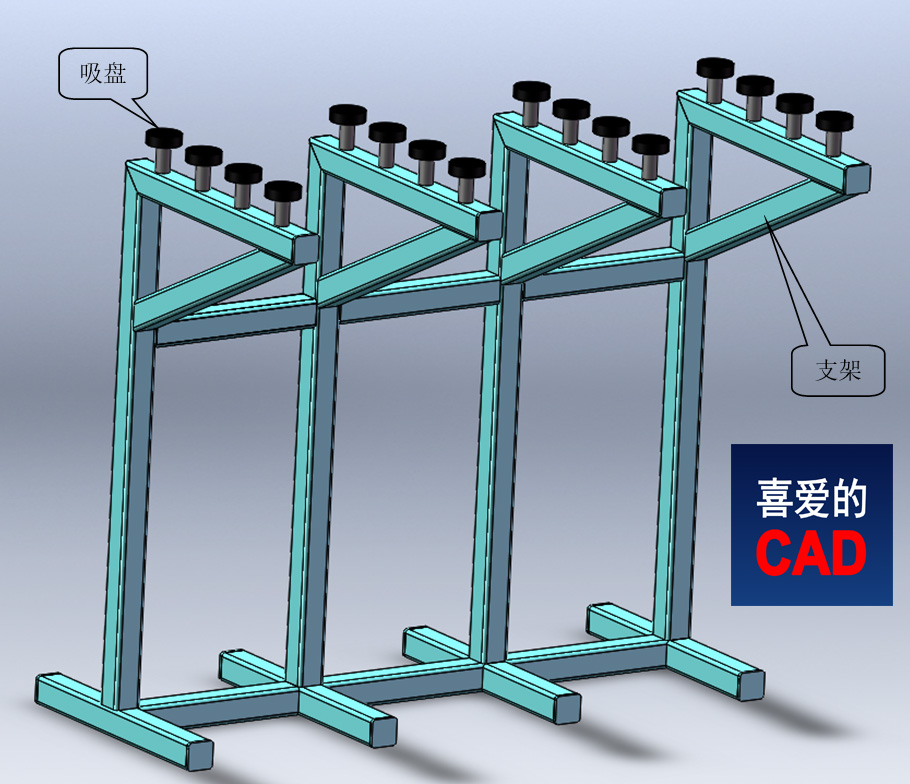
图6 钣金折弯换手架
当机器人需要更换工件的吸取位置时,机器人将工件放至换手架上暂存,调整姿势后再次吸取,达到换手的目的。
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号2236
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-2236.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
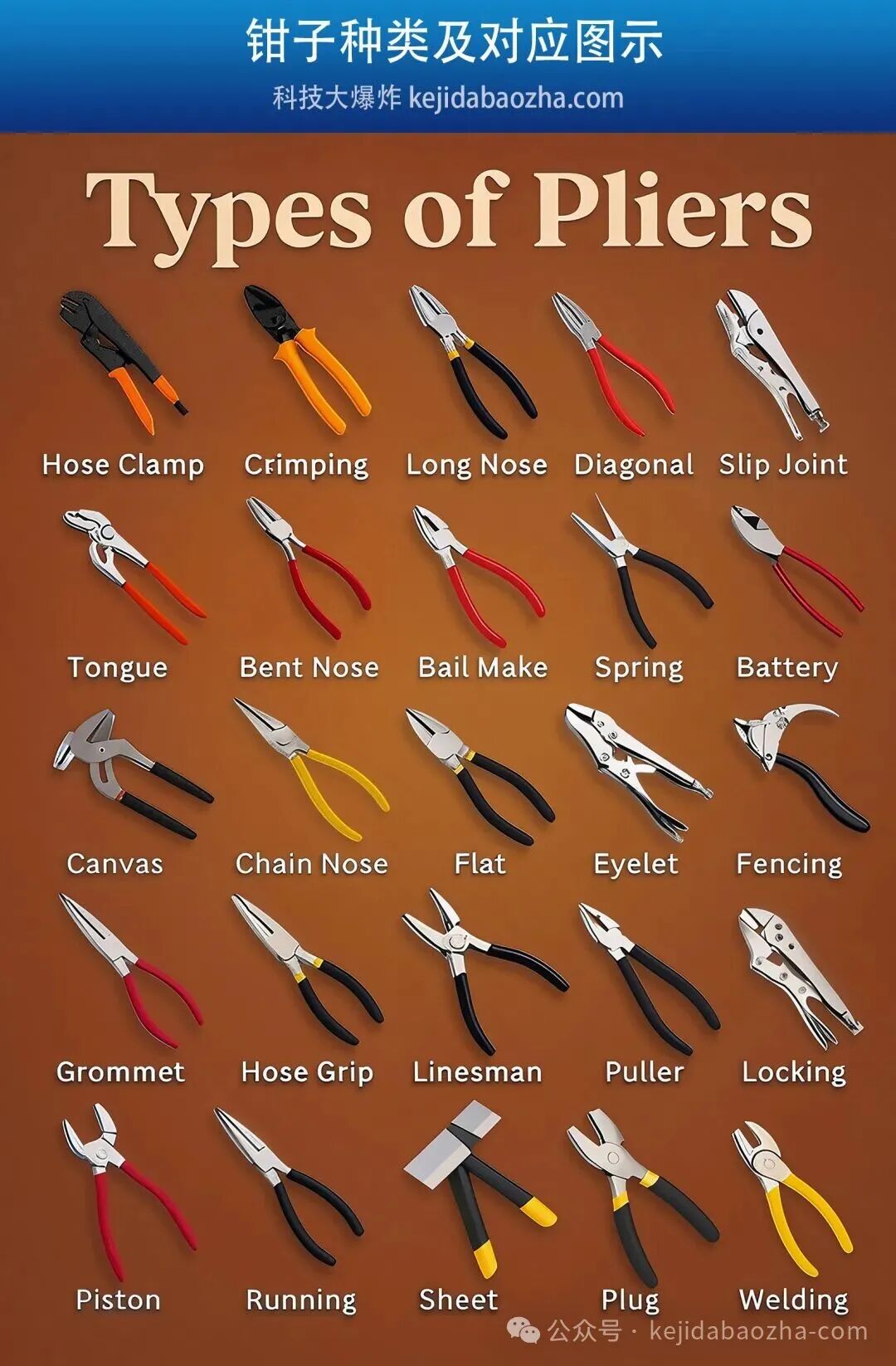 钳子种类及对应图示,各种钳子的中英文名称对照
钳子种类及对应图示,各种钳子的中英文名称对照 装车橇设计大师:装车橇的详细设计(标准规范、设计原则、详细设计和三维模型下载地址)
装车橇设计大师:装车橇的详细设计(标准规范、设计原则、详细设计和三维模型下载地址) 桁架机械手安装调试太难了,精度要求那么高,我们根本干不了
桁架机械手安装调试太难了,精度要求那么高,我们根本干不了- 机器人学导论,Introduction to Robotics Mechanics and Control,美国斯坦福大学教材
- 储油库大气污染物排放标准 GB20950,原油发车采用顶部浸没式或底部发油方式
- 差评!再也不用免费的CAD软件了,LibreCAD太难用了,我已经离不开AutoCAD了
- 在外协厂遇到一位懂技术的老师傅,惺惺相惜,相聊甚欢
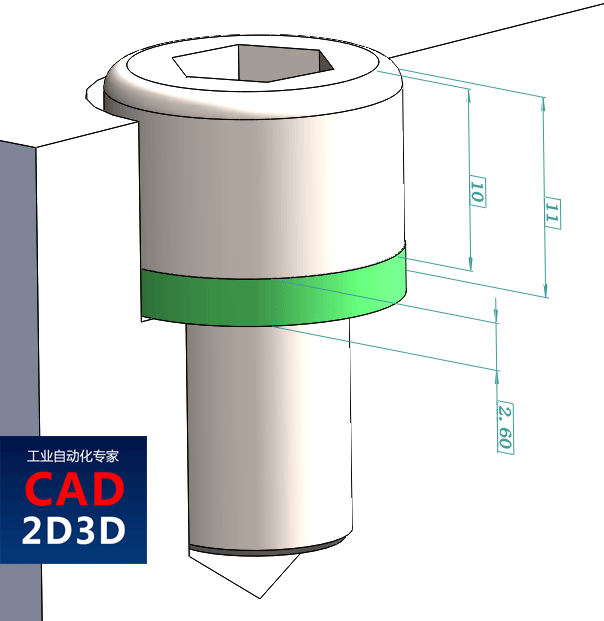 螺钉沉孔能放弹垫吗,看完沉孔深度、螺钉头和弹垫厚度,我才恍然大悟
螺钉沉孔能放弹垫吗,看完沉孔深度、螺钉头和弹垫厚度,我才恍然大悟- 管道上温度变送器(传感器)安装规范要求 测温点 插入深度
- 泵管道布置标准规范 - 机械设计手册 管道与管道附件
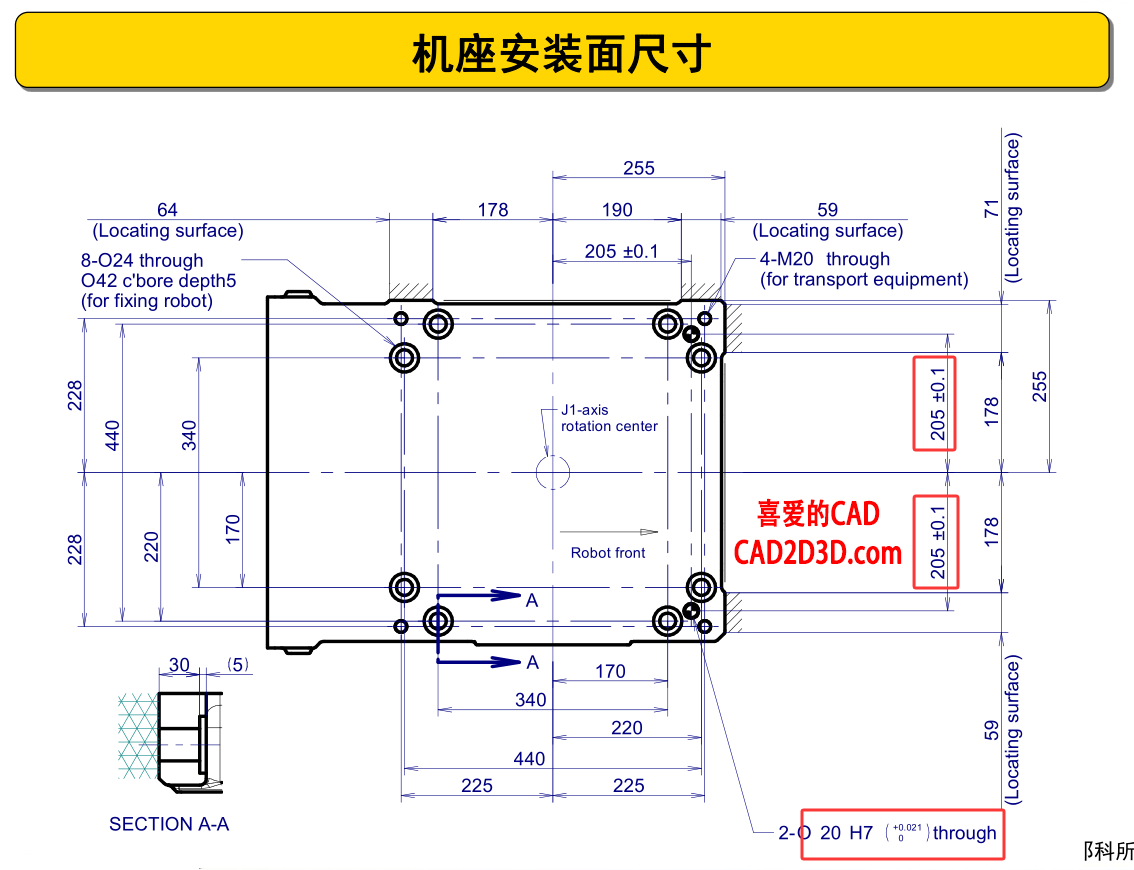 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载