
堆垛机是用于高货架中负荷单元的存取搬运设备。
由行走电机通过驱动轴带动车轮在下导轨(地轨)上做水平行走,由提升电机通过钢丝绳带动载货台做垂直升降运动,由载货台上的货叉做伸缩运动。

单立柱堆垛机
单立柱堆垛机是自动化立体仓库里面的主要组成部分之一,专用于高架仓库。机架结构是由1根立柱、上横梁和下横梁组成的1个矩形框架,,适用于起重量在2吨以下,起升高度在16米以下的仓库 。堆垛机在货架之间的巷道内运行,主要用于搬运装在托盘上或货箱内的单元货物;也可开到相应的货格前,由机上人员按出库要求拣选货物出库。
| 型号 | 额定载荷 | 转运箱尺寸 | 行走速度 | 加速度 | 升降速度 | 货叉速度 |
| SM-DZ-0510 | 50kg | 600*400*340mm | 120m/min | 0.3m/s | 40m/min | 30m/min |
| SM-DZ-1010 | 100kg | 600*400*340mm | 120m/min | 0.3m/s | 40m/min | 30m/min |


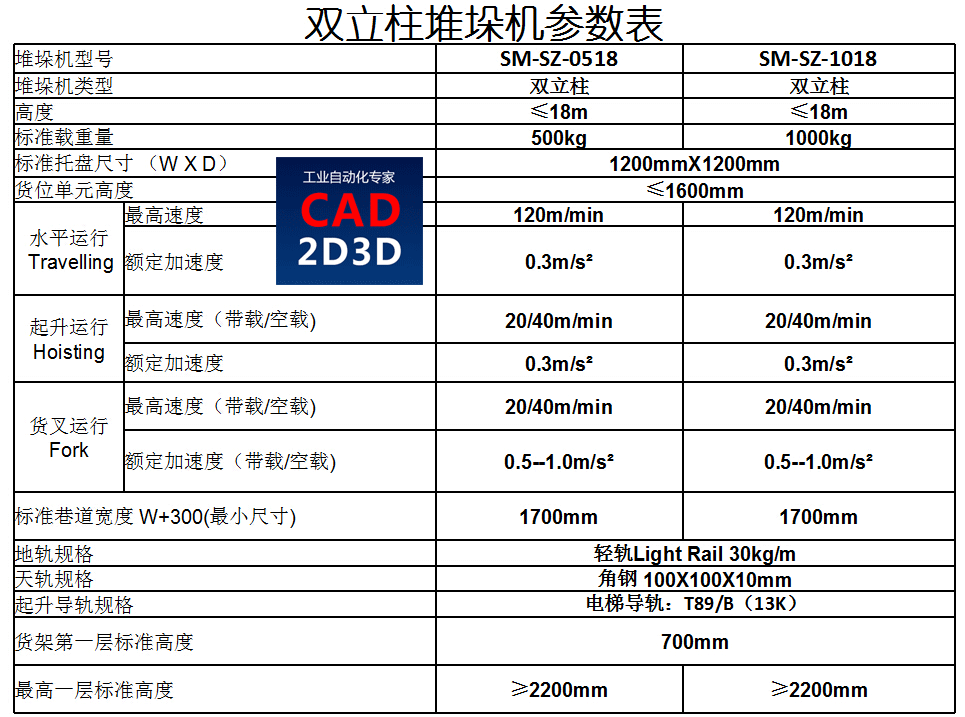
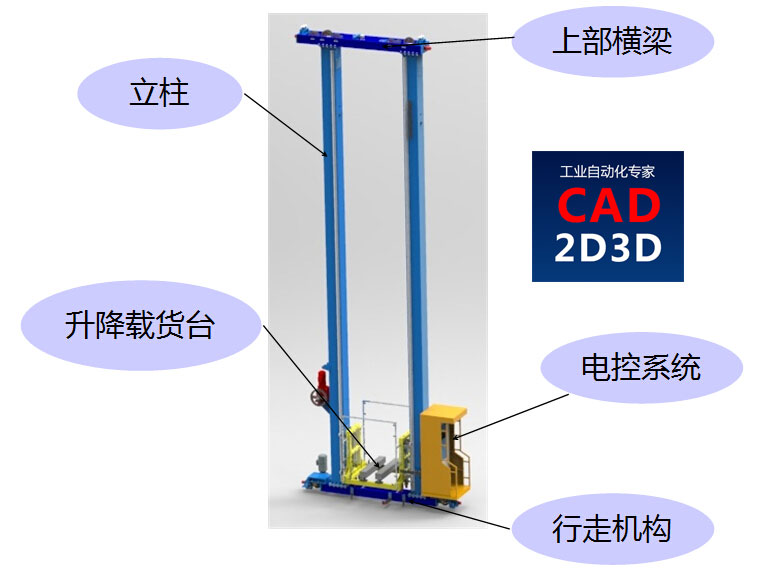
双立柱堆垛机

堆垛机控制系统
采用SIEMENS S7-300系列可编程控制器、施耐德TE ATV系列变频器和检测、控制元件完成堆垛机的各种动作。
堆垛机控制程序采用SIEMENS STEP7编程语言。上位机可通过红外通讯器与堆垛机双向通讯,实时监控。下发作业指令和接收堆垛机的各种状态信息,监视其运行情况。
控制器
采用德国西门子S7-300系列可编程控制器及其输入/输出/通信模块,主机采用CPU313/314。
控制模式
堆垛机工作有维修、手动、单机自动及联机自动四种控制模式。
维修模式
操作人员登机,通过HMI触摸屏操作菜单,直接控制堆垛机的进退、升降或货叉的伸缩运动。此时堆垛机的工作状态为即停模式(类似点动),其间的运行或停止、高低速切换完全由操作人员控制。该模式一般在设备调试或维修时使用。
手动模式
操作人员登机,通过HMI触摸屏操作菜单,直接控制堆垛机的进退、升降或货叉的伸缩运动。此时堆垛机的工作状态为半自动模式,即三维各方向的运动由人工启动,而自动对位并停准。用于设备调试或一般性故障情况下,人工随机存取操作。
单机自动模式
操作人员在堆垛机操作面板(或有地面操作站时在地面操作盘),通过HMI触摸屏操作菜单,输入作业命令(一次可输入多条作业命令),堆垛机自动完成作业后返回原位并等待下批指令。
联机(在线)自动模式
堆垛机通过红外通信器接收由上位机发出的作业指令,自动完成一次作业,并在原地等待下一条作业命令。作业过程和完成情况实时反馈给上位机。
定位方式
堆垛机在水平和垂直运行方向一般使用遮光式光电检测定位,现在更多采用高级的旋转编码器、激光测距器或条码带及扫描器来实现闭环调速和精确的定位。货叉伸缩方向使用接近开关定位。
留言说明
如对本文有疑问,可关注微信公众号 科技大爆炸TheBigBang 直接留言即可。
手机扫描下方二维码直接关注 科技大爆炸TheBigBang。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com
转载请注明
文章作者:尚延伟 原文链接:https://www.cad2d3d.com/post-1402.html




 日本不二缓冲器规格书,缓冲器的种类及选型计算方法
日本不二缓冲器规格书,缓冲器的种类及选型计算方法
 钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
钢丝绳还能减震缓冲?日本都把它做成标准产品了,而我才第一次见
 女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
 滚针凸轮导向器,作为凸轮机构和直线运动的导向使用
滚针凸轮导向器,作为凸轮机构和直线运动的导向使用