
 大疆【新品】DJI Avata 360 8K 全景旗舰无人机 360° 跟拍沉浸式体感操控 O4 全
大疆【新品】DJI Avata 360 8K 全景旗舰无人机 360° 跟拍沉浸式体感操控 O4 全  大疆 DJI Neo 2 会飞的跟拍摄影师 运动亲子户外露营旅行智能跟拍4K入门航拍飞行相机新手无人
大疆 DJI Neo 2 会飞的跟拍摄影师 运动亲子户外露营旅行智能跟拍4K入门航拍飞行相机新手无人  专业触屏液晶遥控器4K高清航拍避障无人机无刷30公里续航GPS返航无人机高清专业航拍遥控飞机高端飞行
专业触屏液晶遥控器4K高清航拍避障无人机无刷30公里续航GPS返航无人机高清专业航拍遥控飞机高端飞行 机器人并不是万能的,做的项目越多,越感觉机器人的局限性也越多,没有我们想象的那么强大,机器人一般常用于对精度要求不高的场合,比如,搬运、焊接、喷漆等,而对于切割、装配等就显得力不从心,造成这种问题的根源就是机器人重复路径精度太低,远不如机械手或直线模组。


之前我们搞过一个切割的项目,将切割工具固定在机器人末端,利用机器人走路径来完成切割,但实际执行的时候,发现机器人切割的轨迹歪歪扭扭,根本就不是一条很直的直线,跟预想的效果差太多。
机器人编程指令里,有直线行走指令,比如日本FANUC机器人的直线指令是L,比如 L P[1] 200mm/sec FINE,但直线指令并不能让机器人走出理想情况下的直线,从A点到B点的直线,编程时只给了A点和B点的坐标,中间点位都是控制系统采用插补算法求出来,插补的话,就涉及到一个细分的问题,细分的越小,直线走的就越接近,因此,机器人实际行走的并不是一条绝对的直线,而是有众多点拟合的一条线,这条线存在偏差就很正常了,而且偏差还很大,这个偏差就是机器人重复路径精度。
下面看一下重复定位精度和重复路径精度有什么区别和联系。
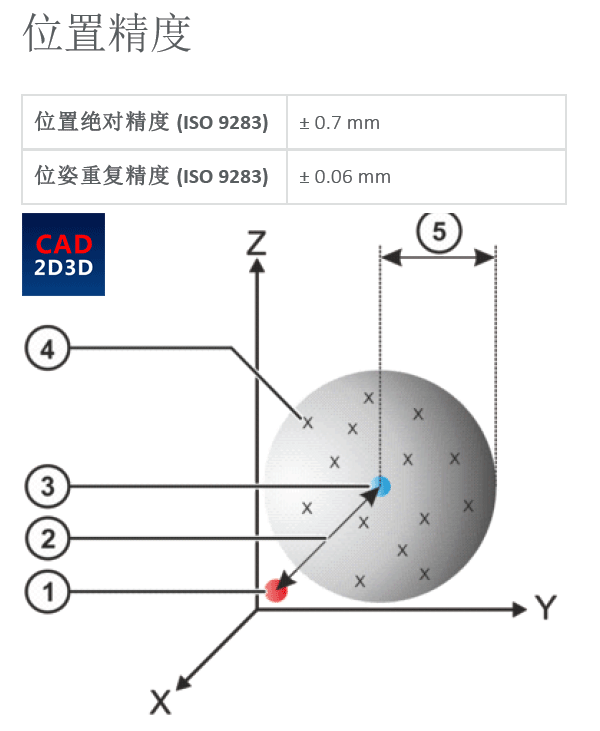
重复定位精度(RP)的定义:对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度。
重复定位精度就是下图⑤所示的距离大小。
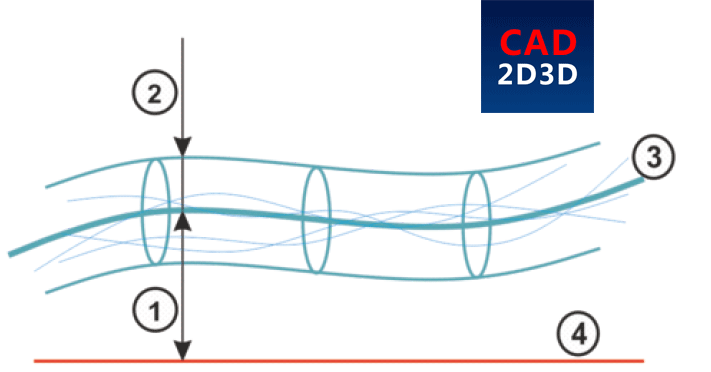
重复路径精度(RT)的定义:对同一指令轨迹重复n次时实到轨迹的一致程度。
重复路径精度就是下图②所示的距离大小。
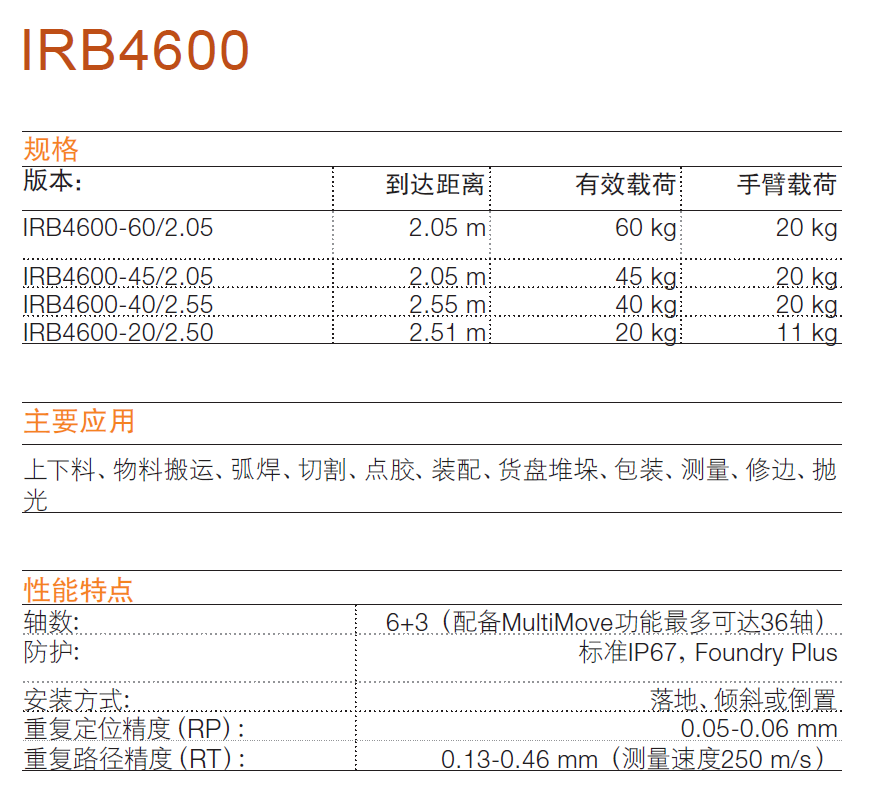
机器人选型时,都要看一下机器人重复定位精度,比如日本FANUC R-2000iC/165F的重复定位精度是±0.05,其实除了重复定位精度之外,还有一个重复路径精度,有些应用就对机器人重复路径精度有要求,但是FANUC官网并没有提供重复路径精度,目前我只知道ABB是提供重复路径精度信息的,比如ABB IRB4600 重复定位精度0.05mm,但重复路径精度0.46mm,两者差一个数量级,具体见下图:
重复路径精度差会产生哪些问题呢?只要涉及到轨迹路径相关的应用需求都要小心,特别是高精度要求的应用,应避免直接使用机器人,而应该优先考虑直线模组。
重复定位精度这个概念很常见,比如各种自动化生产线招标书中,肯定有机器人重复定位精度要求,但很多人只知道皮毛,不知道具体含义,就连很多机器人厂家的技术人员,对重复定位精度的解释也是含糊不清,而重复路径精度,知道的人就更少了,作为技术人员,一定要知其然知其所以然,这样才能做得得心应手万无一失。
机器人重复定位精度和重复路径精度的详细说明请参见 《GB/T 12642-2013 工业机器人 性能规范及其试验方法》:https://www.cad2d3d.com/post-944.html
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1613.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度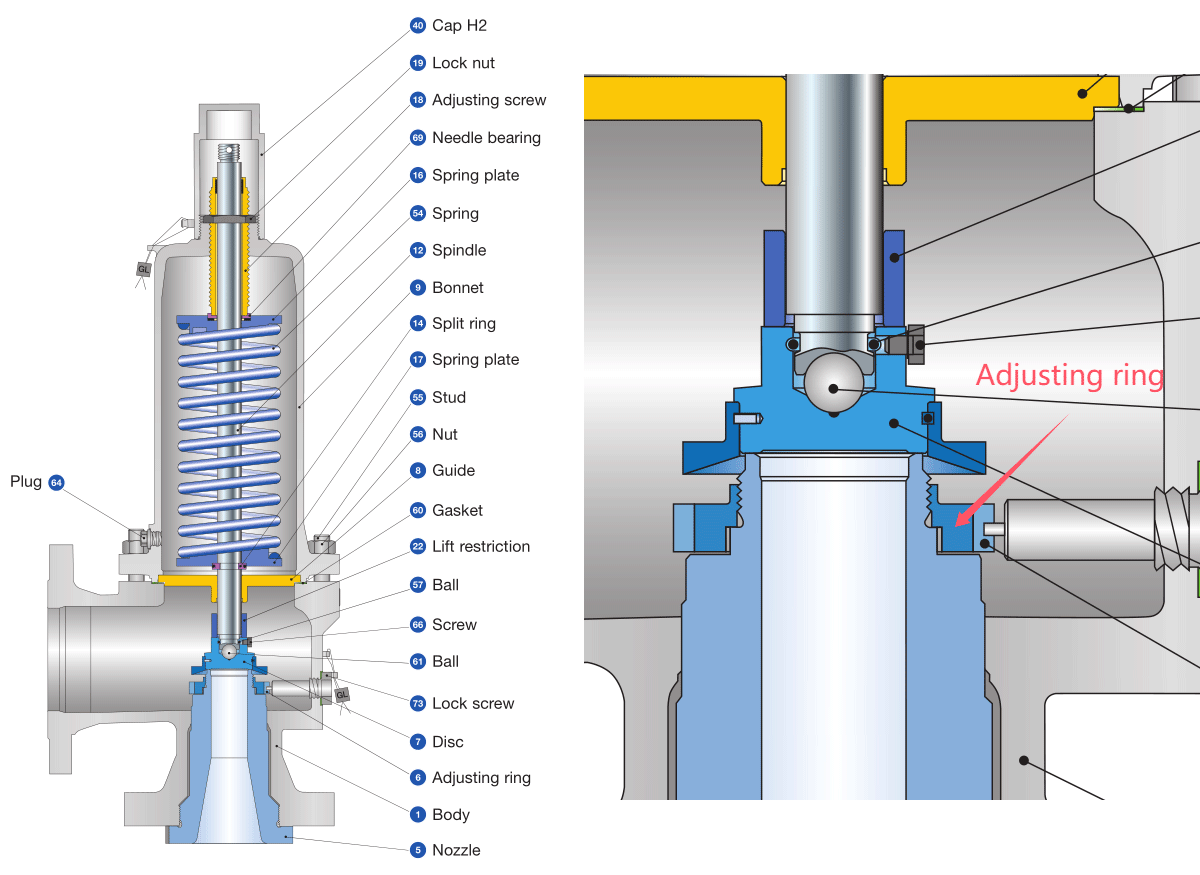 德国莱斯安全阀调节环设计、功能和作用详述,Adjusting Ring of Safety Valves
德国莱斯安全阀调节环设计、功能和作用详述,Adjusting Ring of Safety Valves- 德国剪刀日本制造15元包邮,中国制造丢人吗?非要碰瓷日本和德国
 日本真空发生器空吸入流量大于消耗量,气越用越多,永动机来了?
日本真空发生器空吸入流量大于消耗量,气越用越多,永动机来了?- 现实世界毫无存在感,互联网上也毫无痕迹,我们对这个世界的贡献几乎为零
- 机器人学导论,Introduction to Robotics Mechanics and Control,美国斯坦福大学教材
- 不要问我设备的设计使用寿命是多少,因为我也不知道,我就是随手一写
- 方案大师 第3.3节:锻造自动化生产线的设计方法和流程
- 日本大隈全自动化机床,所有活都让机器人做,无人工厂已经到来
- SolidWorks草图中快速选中文字的两种方法:缩小或右键属性
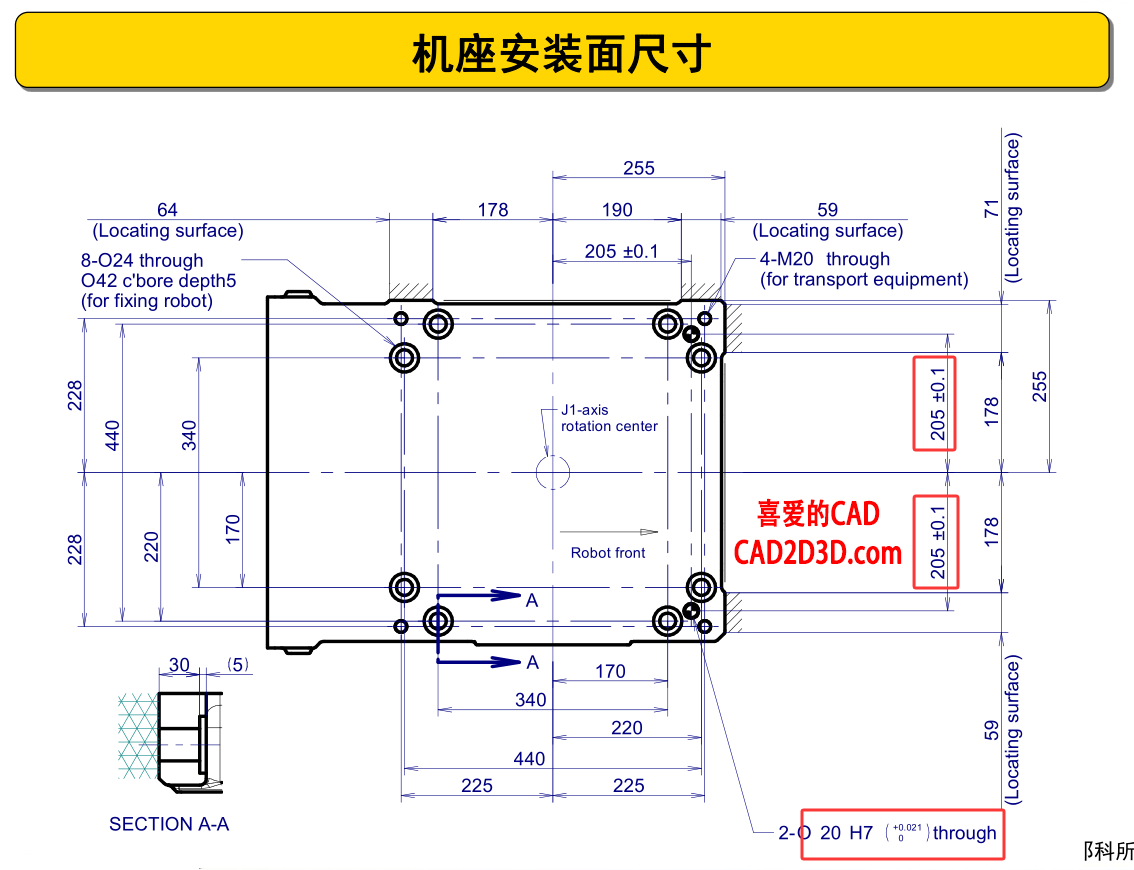 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载