
 AspenPlusV11/12/14/15化工流程模拟远程安装HYSYS、EDR服务
AspenPlusV11/12/14/15化工流程模拟远程安装HYSYS、EDR服务  水性涂料树脂合成及应用 闫福安 分子设计原理 树脂结构和性能 涂料研究开发应用管理 化学工程与工艺
水性涂料树脂合成及应用 闫福安 分子设计原理 树脂结构和性能 涂料研究开发应用管理 化学工程与工艺  化工流程模拟Aspen Plus实例教程 张晨第三版 AspenPlus软件 化工过程模拟实训 化工
化工流程模拟Aspen Plus实例教程 张晨第三版 AspenPlus软件 化工过程模拟实训 化工 刚刚在车间里研究日本和德国的机器人,发现稍微大一点的机器人,J2都会配置一个平衡缸,日本FANUC机器人用的是弹簧式平衡,德国KUKA用的液压式(隔膜蓄能器)或配重块的方式,我个人认为液压(隔膜蓄能器)的方式是最好的,出力基本恒定,而且占用空间小。

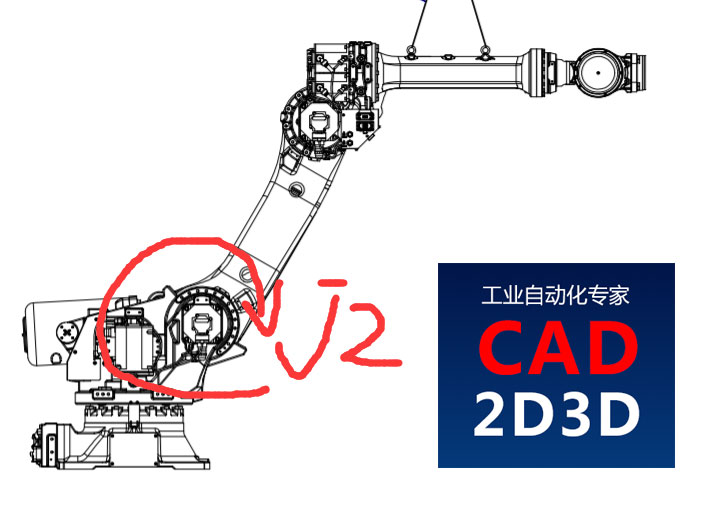
机器人J2轴为什么要用平衡缸?
先看一下实际情况,下图是FANUC R-2000iC/125L机器人1/2/3轴电机上的铭牌,电机功率都是4.3KW,机器人4/5/6轴电机是2KW。
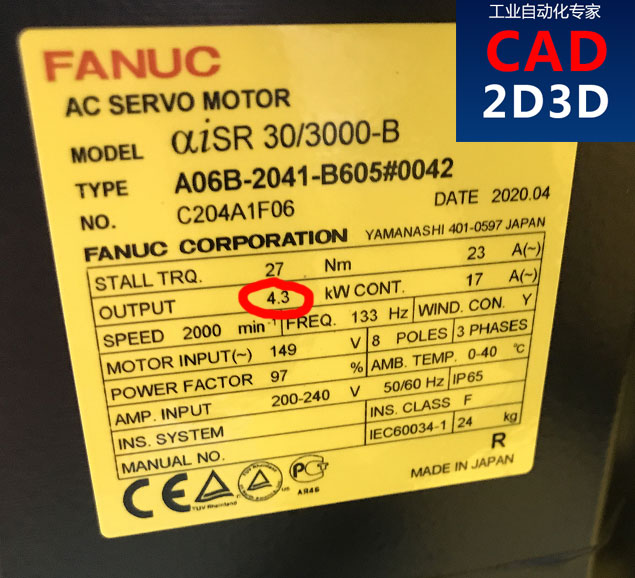
细心的同学肯定发现了,原来机器人1/2/3轴的电机功率是一样的,大家有没有想想,为什么会是一样的?
看一下6轴关节型机器人,在末端负载相同的情况下,负载对J2轴产生的扭矩肯定要远远大于J3轴,通过机器人臂展尺寸,可以推断出,J2轴需要的扭矩大概是J3的2倍,理论上J2和J3轴不能使用同一个规格的电机,为了减少J2轴电机,工程师想出了了一个好方法,那就是通过使用配重的方式来抵消部分扭矩,使整个力系出于平衡状态,这样对电机的扭矩要求就会大幅缩小。
配重有很多方式,使用配重块,成本最低,但会增加转动惯量,使用弹簧缸,出力不恒定,因此,只有液压缸(隔膜蓄能器)这样方式才是最理想的。
下图是机器人J3轴使用配重块的情形:

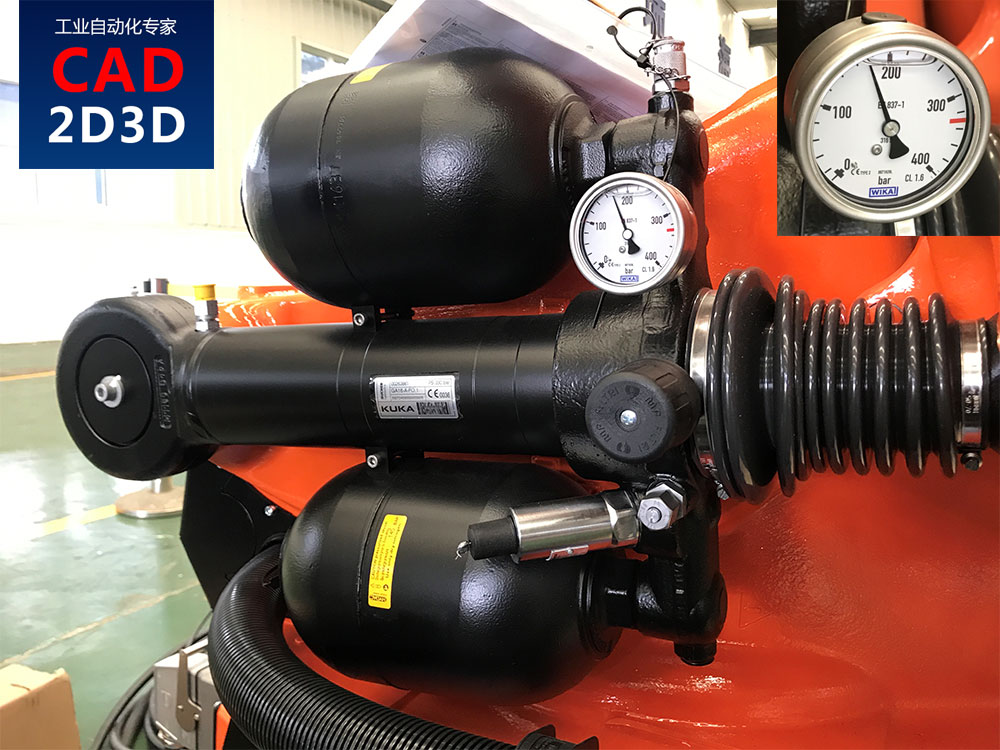
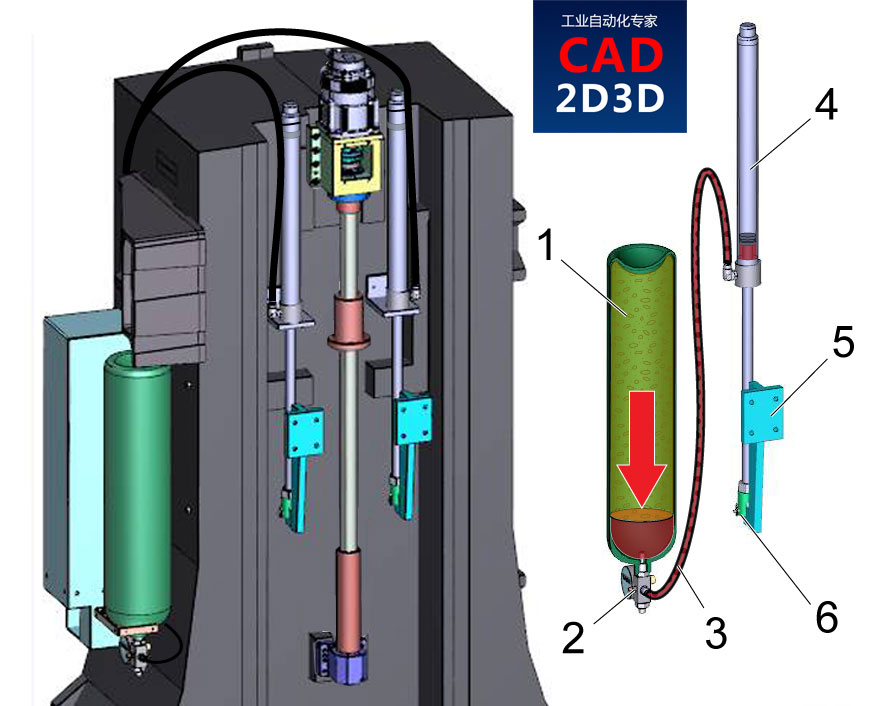
下面看一下KUKA 160kg机器人平衡缸:
下面是KUKA平衡缸的原理图:
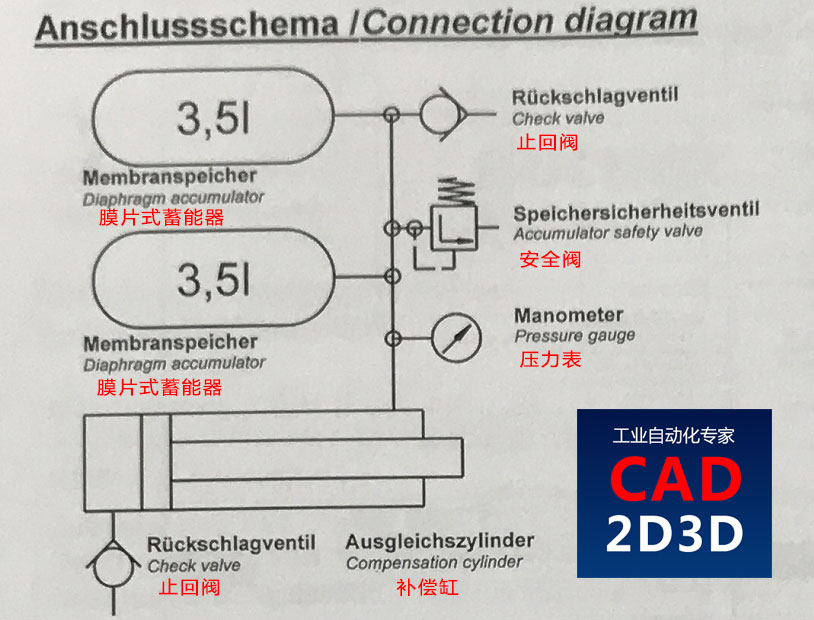
KUKA机器人用的液压平衡缸,缸径40mm,油压20MPa,允许负载20KN左右,也就是说这个平衡缸会维持一个20kN的拉力。
下面算一下机器人负载160kg时,对J2轴产生的扭矩:
负载对J2轴扭矩T1=F(负载重量)×L1(负载力臂)=160kg×9.8N/kg×2米≈3200N.m
下面算一下平衡缸可抵消多大的扭矩:
平衡缸对J2轴的扭矩T2=F(平衡杠推力)×L2(平衡杠力臂)=20kN×0.1米=2000N.m
下面算一下4.3kW的电机减速机产生的扭矩:
J2轴最大的旋转角速度w=105°/s(1.83rad/s),转速n=17.5转/分钟
T3=9550P/n=9550×4.3/17.5=2346N.m
因此,T3>T1-T2,满足使用要求,通过以上计算,符合预期。
现在应该可以明白工程师为什么要选用平衡缸了吧,其实平衡缸不仅用在机器人上,在机床、桁架机械手、压力机等设备上都能见到。
日本和德国的机器人还是值得研究和学习的,通过多看多想,达到知其然知其所以然,最终完全掌握机器人的设计和制造,国产机器人如果能掌握其中10%的精髓,也不至于现在这个局面。
相关文章:
- 隔膜式蓄能器结构:https://www.cad2d3d.com/post-1555.html
- 气动平衡缸结构原理:https://www.cad2d3d.com/post-1550.html
- 液压平衡杠结构原理:https://www.cad2d3d.com/post-1551.html
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1597.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
- 为什么汽轮机出口位置后要加冷凝器?后序还要再次加热,是不是多此一举?
- GB 50316 工业金属管道设计规范,法兰、接头等选用要求
- Flowserve Valtek 气动薄膜式调节阀内部结构及规格参数,泄露等级可达VI级(需要软密封)
 干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美
干货!日本制作的轮毂电机视频,电动汽车四轮独立驱动并不完美 女司机爽了,丰田车新增螃蟹行走模式,可横行霸道
女司机爽了,丰田车新增螃蟹行走模式,可横行霸道- 瑞士古德尔(固都)(GUDEL)公司官网,专注桁架机械手、机器人地轨设计制造
- 机器人软浮动,解决取放件时位置偏差
- 深度学习(deep learning)会不会让机器突破限制,摆脱人类控制?
- 欧标和美标法兰公称压力等级划分,两种标准的法兰压力等级能直接对应吗?
 如何将断裂在螺纹孔内的螺钉取出去?断丝取出器
如何将断裂在螺纹孔内的螺钉取出去?断丝取出器
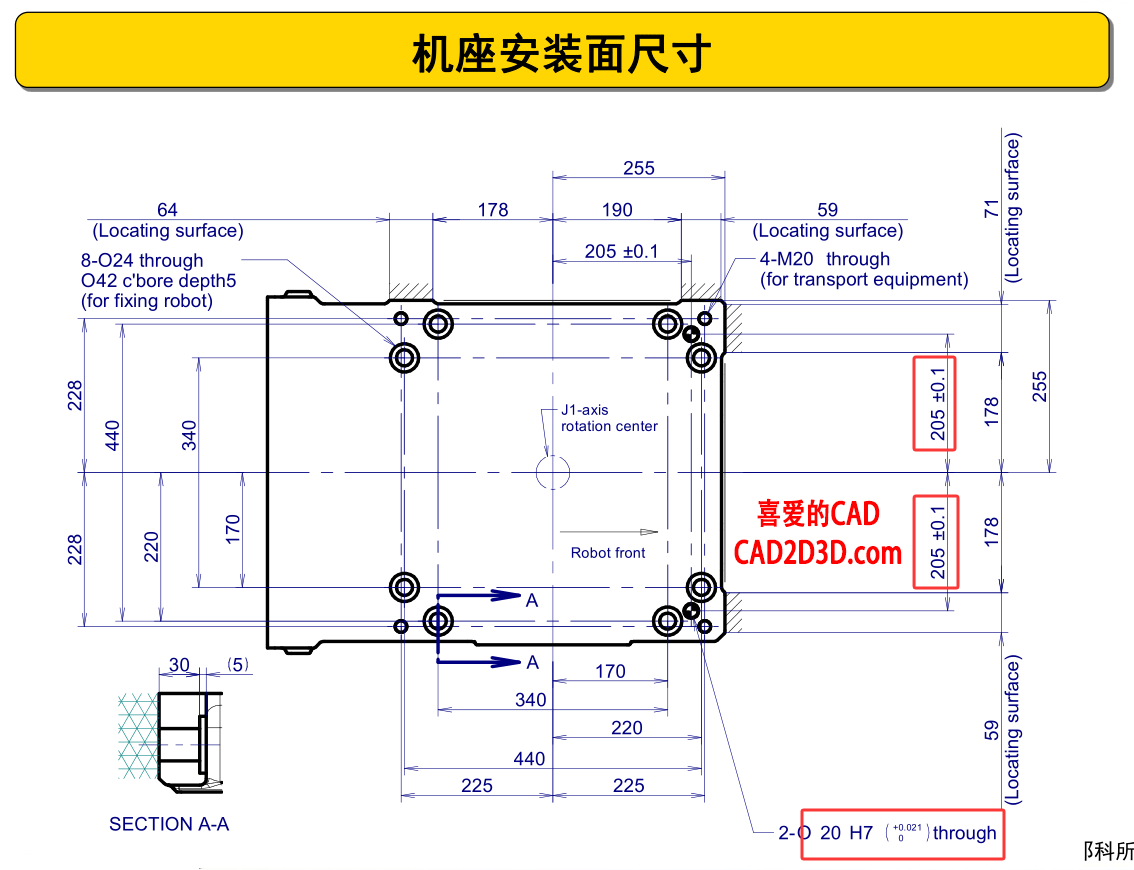 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载