
 齿轮减速电机380V卧式立式400W750W晟邦变频调速电动机齿轮减速机
齿轮减速电机380V卧式立式400W750W晟邦变频调速电动机齿轮减速机  减速电机380V卧式200W/400W城邦750W变频调速1500W立式齿轮减速机
减速电机380V卧式200W/400W城邦750W变频调速1500W立式齿轮减速机  减速电机380V卧式400W750W1500W 立式齿轮减速机三相变频刹车马达
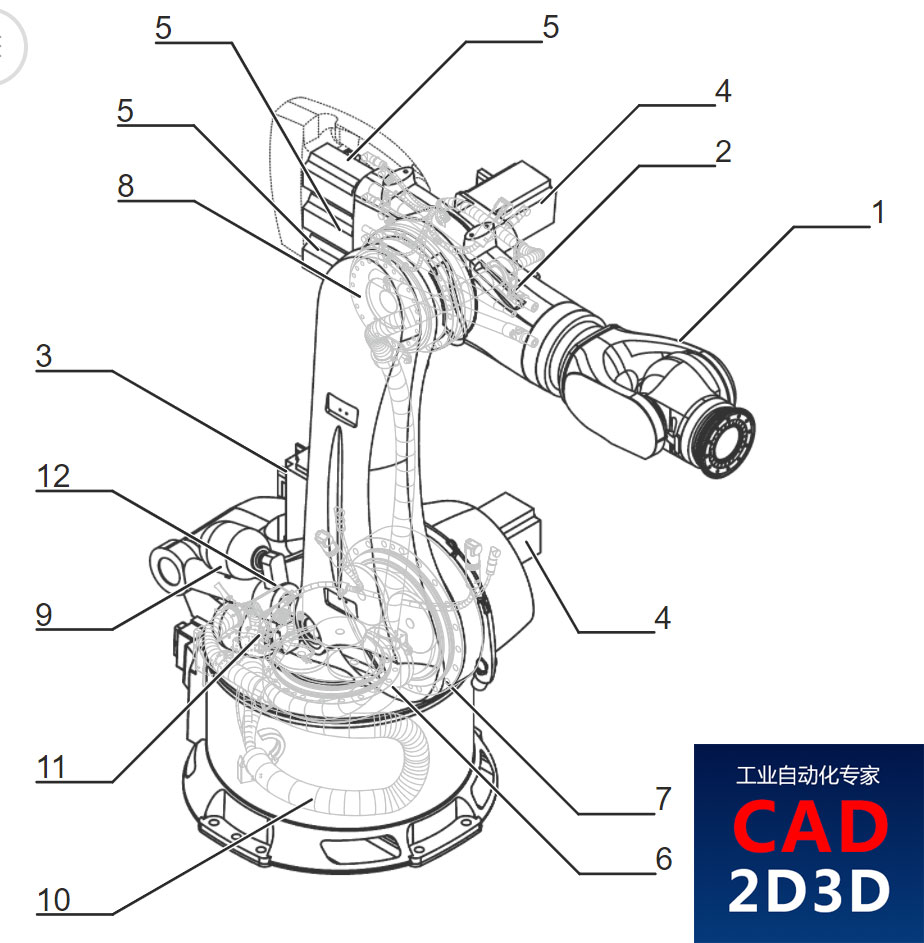
减速电机380V卧式400W750W1500W 立式齿轮减速机三相变频刹车马达 1 KR 600 R2830 机器人本体示意图

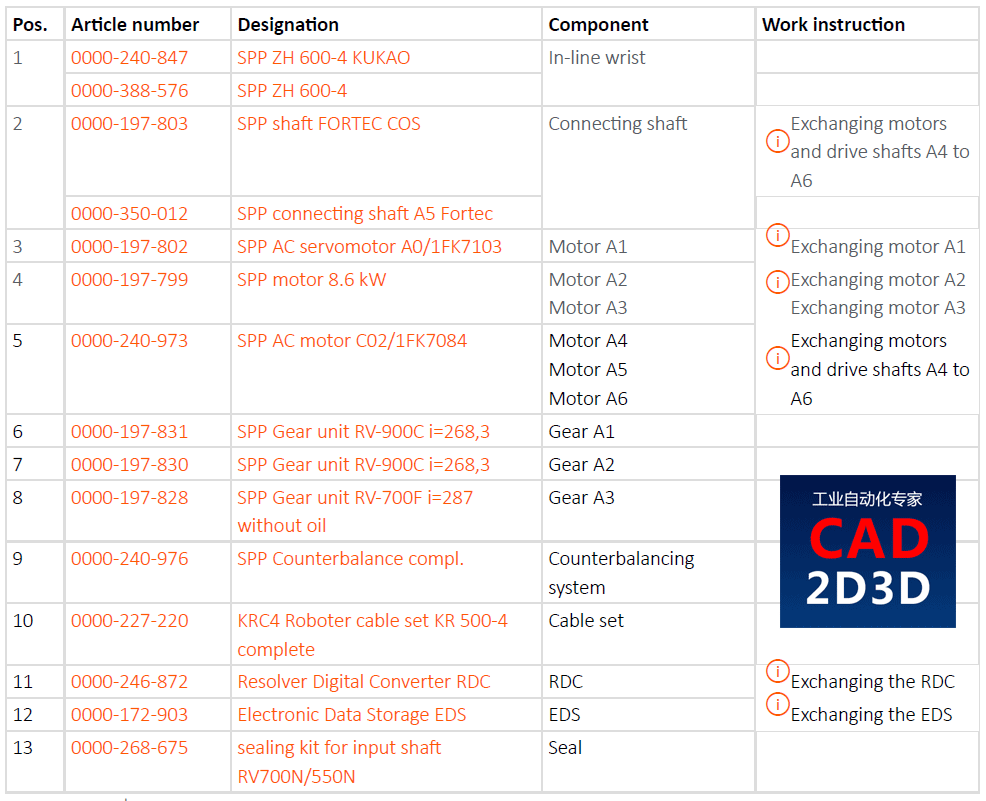
2 KR 600 R2830 机器人结构组成
3 技术参数
| KR 600 R2830 | |
| 轴数 | 6 |
| 可控制的轴数 | 6 |
| 工作空间体积 | 68 m³ |
| 位姿重复精度 (ISO 9283) | ± 0.08 mm |
| 重量 | 约 2650 kg |
| 额定负荷 | 600 kg |
| 最大负载能力 | 729 kg |
| 最大运动范围 | 2826 mm |
| 防护等级 (IEC 60529) | IP65 |
| 机器人机械手防护等级 (IEC 60529) | IP65 |
| 噪声等级 | < 75 dB (A) |
| 安装位置 | 地面 |
| 占地面积 | 1050 mm x 1050 mm |
| 运动系统安装面布孔图 | S960 |
| 允许倾角 | ≤ 0 ° |
| 标准色 | 底座: 黑色 (RAL 9011); 活动部件:KUKA Industrial Orange (RAL 2009) |
| 控制器 | KR C5 L6/L7; KR C4 |
| 变压器名称 | KR C4: KR600R2830 C4 FLR; KR C5: KR600R2830 C4 FLR |
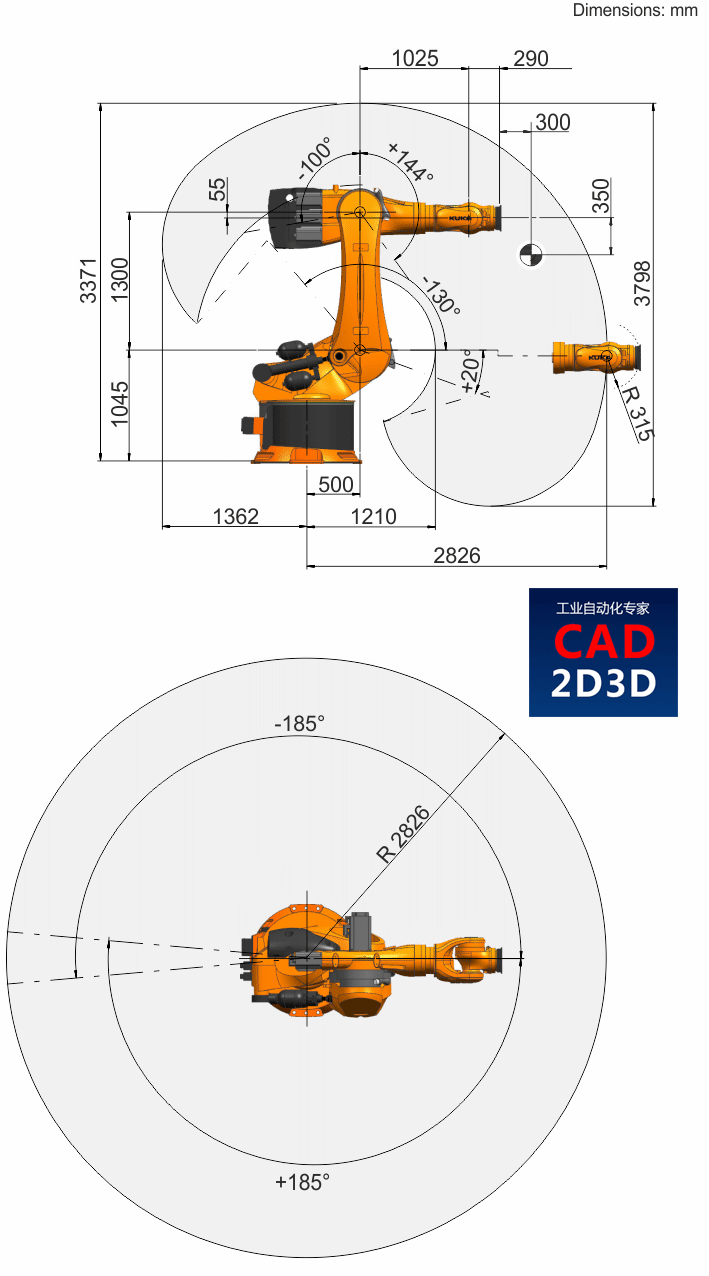
轴数据
| 运动范围 | |
| A1 | ±185 ° |
| A2 | -130 ° / 20 ° |
| A3 | -100 ° / 144 ° |
| A4 | ±350 ° |
| A5 | ±120 ° |
| A6 | ±350 ° |
| 额定负载时的速度 | |
| A1 | 80 °/s |
| A2 | 75 °/s |
| A3 | 70 °/s |
| A4 | 70 °/s |
| A5 | 70 °/s |
| A6 | 110 °/s |
4 工作范围
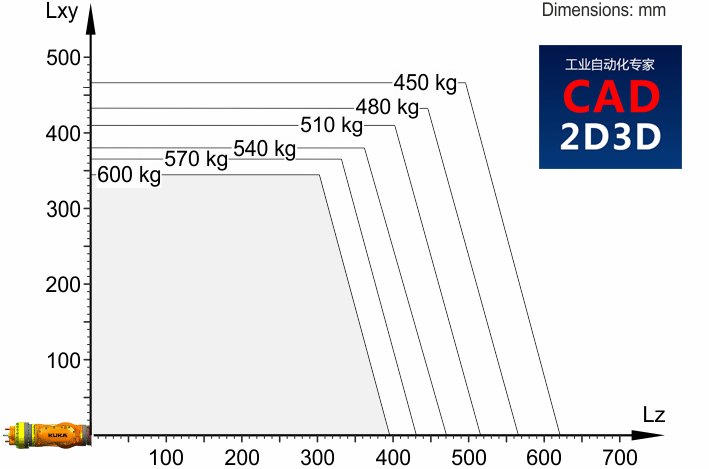
5 负载能力
| 额定负荷 | 600 kg |
| 最大负载能力 | 729 kg |
| 法兰 Ix 额定质量转动惯量 | 300 kgm² |
| 法兰 Iy 额定质量转动惯量 | 300 kgm² |
| 法兰 Iz 额定质量转动惯量 | 300 kgm² |
| 底座的额定附加负载 | 0 kg |
| 底座的最大附加负载 | 0 kg |
| 转盘的额定附加负载 | 0 kg |
| 旋转机构的最大附加负载 | 400 kg |
| 大臂的额定附加负载 | 0 kg |
| 大臂的最大附加负载 | 100 kg |
| 小臂的额定附加负载 | 50 kg |
| 小臂的最大附加负载 | 100 kg |
| 负载重心额定距离 | |
| Lxy | 350 mm |
| Lz | 300 mm |
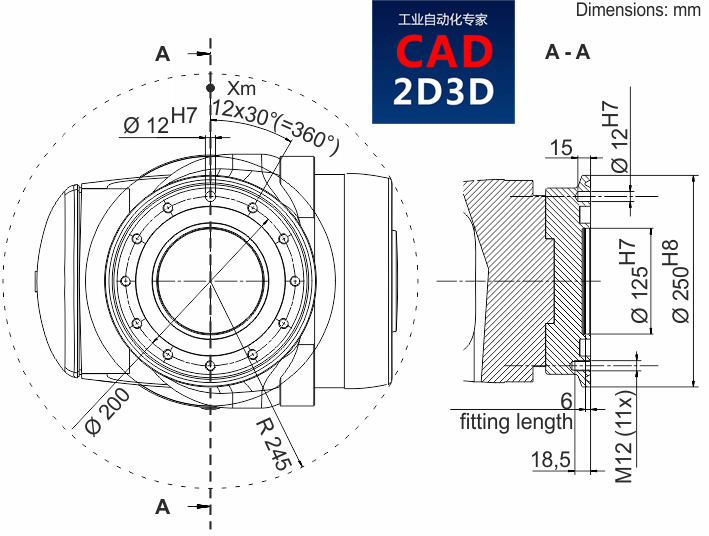
6 连接法兰
7 地基基础
| 纵向动力 F(v) | |
| F(v 正常) | 37000 N |
| F(vmax) | 40500 N |
| 横向动力 F(h) | |
| F(h 正常) | 15900 N |
| F(hmax) | 23500 N |
| 倾覆力矩 M(k) | |
| M(k 正常) | 58900 Nm |
| M(kmax) | 84500 Nm |
| 轴 2 转矩 M(r) | |
| M(r 正常) | 18500 Nm |
| M(rmax) | 45500 Nm |
8 末端法兰负载能力
Due to the motion of the payload (e.g. tool) mounted on the robot, forces and torques act on the mounting flange. These forces and torques depend on the motion profile as well as the mass, load center of gravity and mass moment of inertia of the payload.
The specified values refer to nominal payloads at the nominal distance and do not include safety factors. It is imperative for the load data to be entered in the robot controller. The robot controller takes the payload into consideration during path planning. A reduced payload does not necessarily result in lower forces and torques.
The values are guide values determined by means of trial and simulation and refer to the most heavily loaded machine in the robot family. The actual forces and torques may differ due to internal and external influences on the mounting flange or a different point of application. It is therefore advisable to determine the exact forces and torques where necessary on site under the real conditions of the actual robot application.
The operating values may occur permanently in the normal motion profile. It is advisable to rate the tool for its fatigue strength.
The EMERGENCY STOP values may arise in the event of an Emergency Stop situation of the robot. As these should only occur very rarely during the service life of the robot, a static strength verification is usually sufficient.
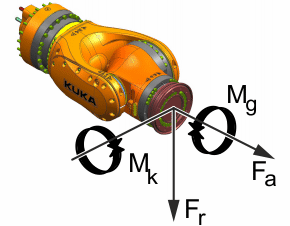
| Flange loads during operation | |
| F(a) | 9200 N |
| F(r) | 7900 N |
| M(k) | 4200 Nm |
| M(g) | 2310 Nm |
| Flange loads in the case of EMERGENCY STOP | |
| F(a) | 10500 N |
| F(r) | 12500 N |
| M(k) | 9000 Nm |
| M(g) | 5600 Nm |
9 精度数据
1)位置精度
| 位置绝对精度 (ISO 9283) | ± 1.2 mm |
| 位姿重复精度 (ISO 9283) | ± 0.08 mm |

| 1 | 编程设定的位置 | 4 | 测得的位置 |
| 2 | 位置绝对精度 | 5 | 位置重复精度 |
| 3 | 测得位置的平均值 | ||
位置精度表示编程的机器人位置和实际占用的机器人位置之间的偏差,并用坐标测量机(CMM)在 9 个位置测量。重复精度由重复 30 次测量时实际占用的机器人位置的偏差得出。对于定位精确的机器人,这些值针对的是机器人基座。
2)轨迹精度
线性运动的轨迹精度:
| LIN 轨迹绝对精度 (ISO 9283) | ± 1.5 mm |
| SLIN 轨迹绝对精度 (ISO 9283) | ± 1.2 mm |
| 轨迹重复精度 线性 (ISO 9283) | ± 0.2 mm |
该数据针对的是 1 m/s 的参考速度。
圆周运动的轨迹精度:
| CIRC 轨迹绝对精度 (ISO 9283) | ± 1.4 mm |
| SCIRC 轨迹绝对精度 (ISO 9283) | ± 0.8 mm |
| 圆周轨道重复精度 (ISO 9283) | ± 0.2 mm |
该数据针对的是 0.5 m/s 的参考速度。
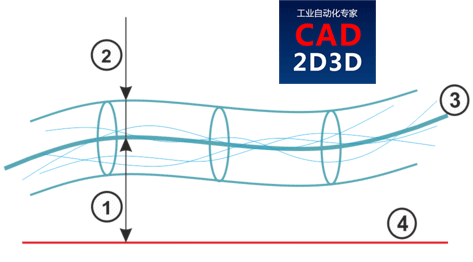
| 1 | 轨迹绝对精度 | 3 | 运行轨迹的平均值 |
| 2 | 轨迹重复精度 | 4 | 编程的轨迹 |
轨迹精度表示机器人在编程的轨迹上运动的能力。
轨迹重复精度表示 10 个运行轨迹与运行轨迹平均值的偏差。
3)超调状态
| 振幅 | 0.6 mm |
| 定位时间 | 0.3 s |
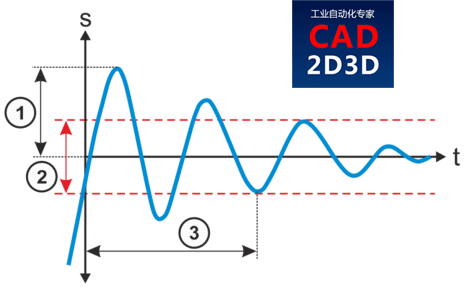
| 1 | 超调振幅 | 3 | 定位时间 |
| 2 | 公差范围 |
- 超调振幅影响机器人在特定位置执行受控的精确暂停的能力。
- 定位时间表示机器人在特定位置上停止的速度。
- 给出的数据基于 ISO 9283,并使用 Krypton/Metris 的基于摄像机的系统测得。因此重复精度被定义为 3 sigma 值。
- 这些数值仅适用于定位精确的机器人选项、且不使用运动模式的新型机器人。
- 所有数值均以额定负载测得。
完整版 KUKA机器人 KR 600 R2830 技术规格书(PDF格式)请参见下方的 下载地址
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1639.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 地价上涨,国内立体库开始爆发,一个汽车壳体立体库,节省千万元
地价上涨,国内立体库开始爆发,一个汽车壳体立体库,节省千万元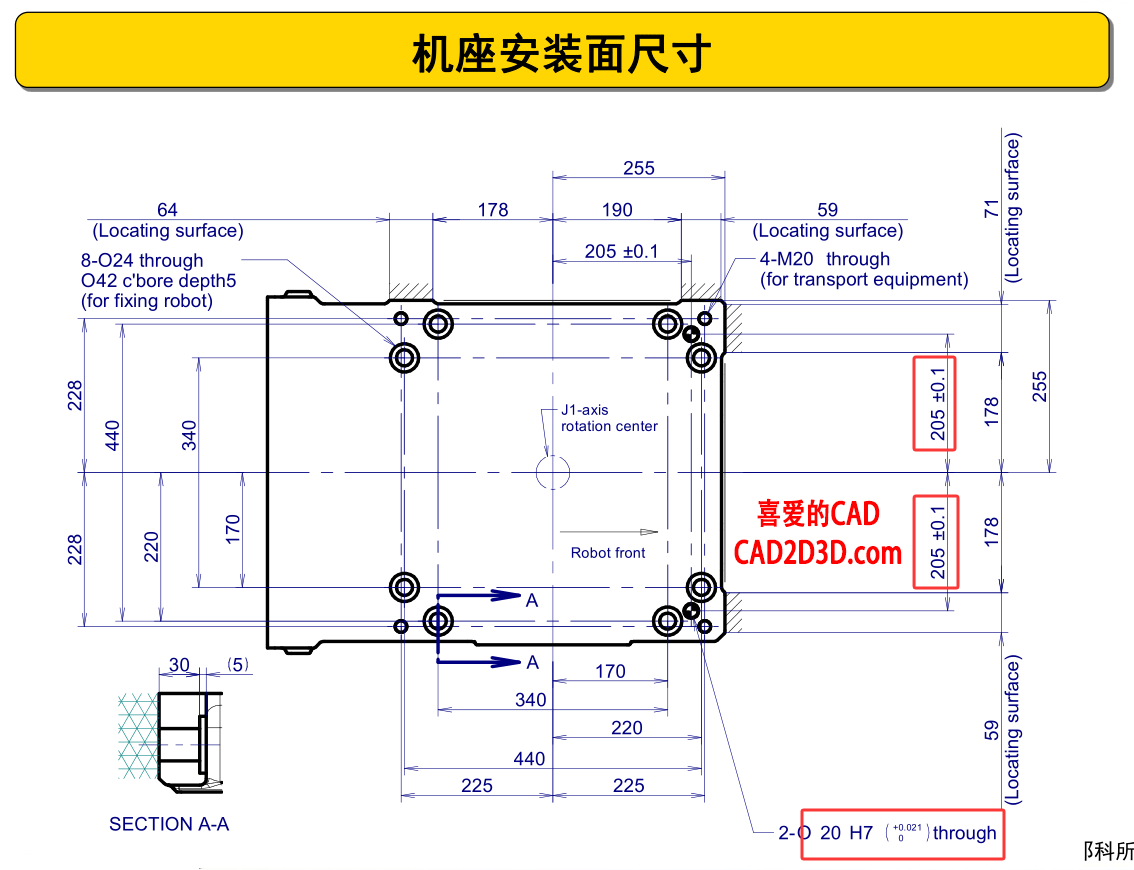 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载