
与
电气设计 相关商品:
查看所有与
电气设计 相关商品 >>
 电气控制原理图代画接线图代做西门子PLC程序eplan梯形图布置设计
电气控制原理图代画接线图代做西门子PLC程序eplan梯形图布置设计  建筑施工图纸cad代画钢结构给排水设计装修报审报建电气消防暖通
建筑施工图纸cad代画钢结构给排水设计装修报审报建电气消防暖通  PLC程序设计代做电气原理图梯形图西门子三菱自动化编程仿真代编
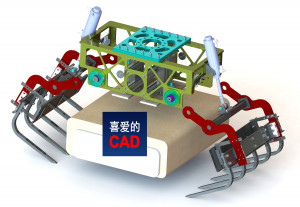
PLC程序设计代做电气原理图梯形图西门子三菱自动化编程仿真代编 机器人码垛手爪用来抓取料袋,采用气缸驱动,框架式结构,重量轻,强度好,实现料袋的快速抓取。机器人码垛手爪采用SolidWork 2020 设计,3D模型下载地址见页面底部下载链接,码垛机器人手爪三维设计效果图如下:
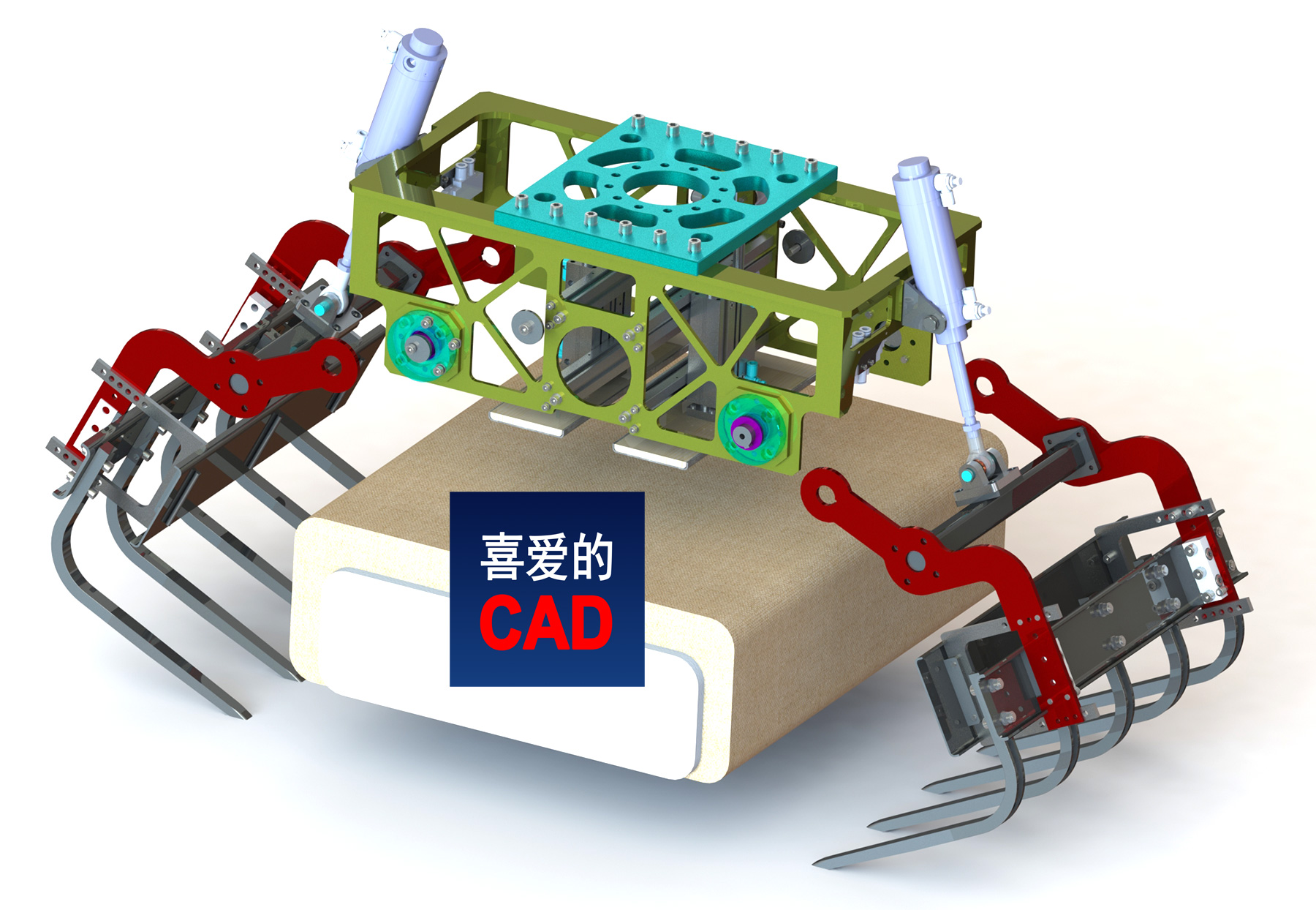
图1 码垛机器人手爪3D模型设计效果图
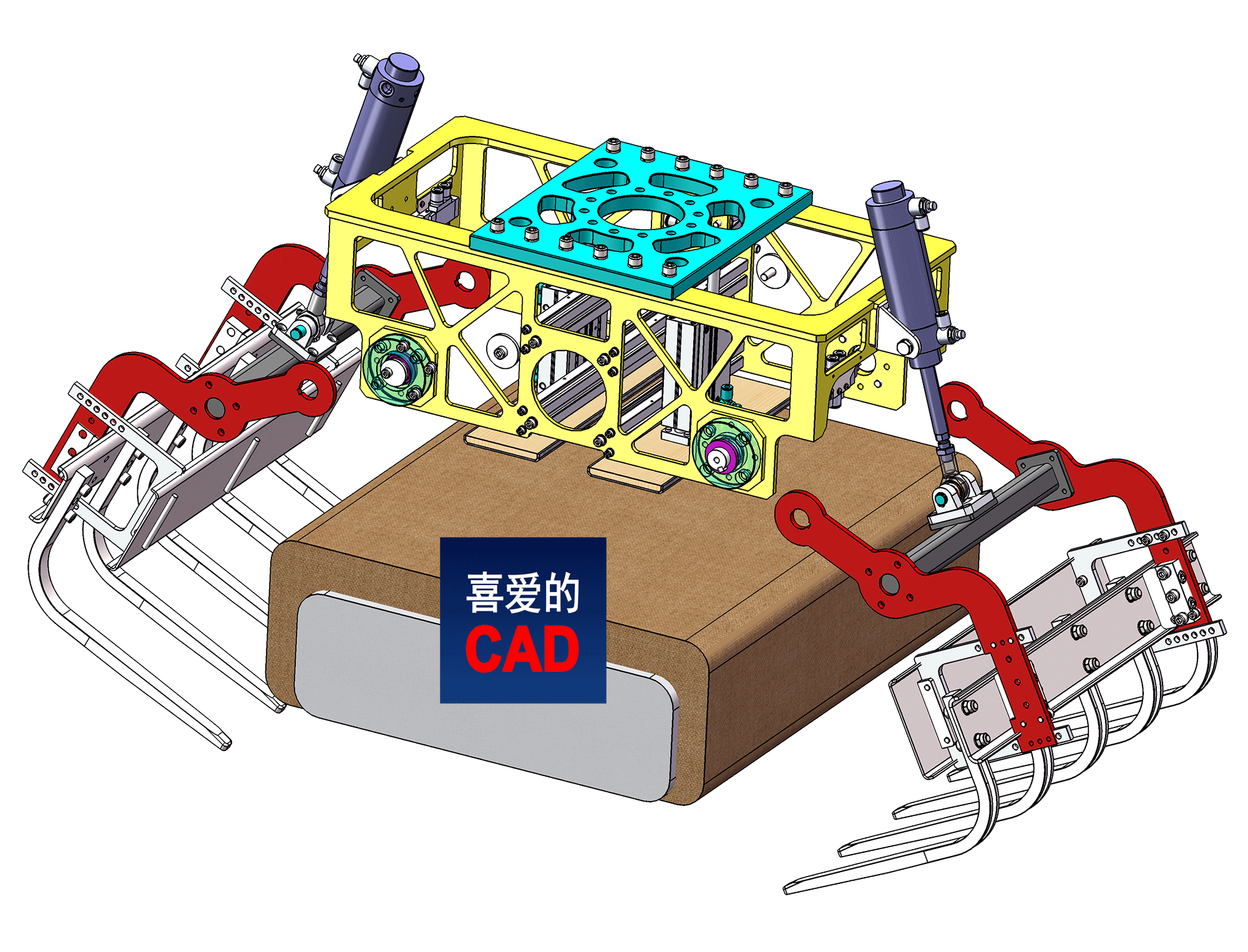
图2 码垛机器人手爪3D模型设计效果图
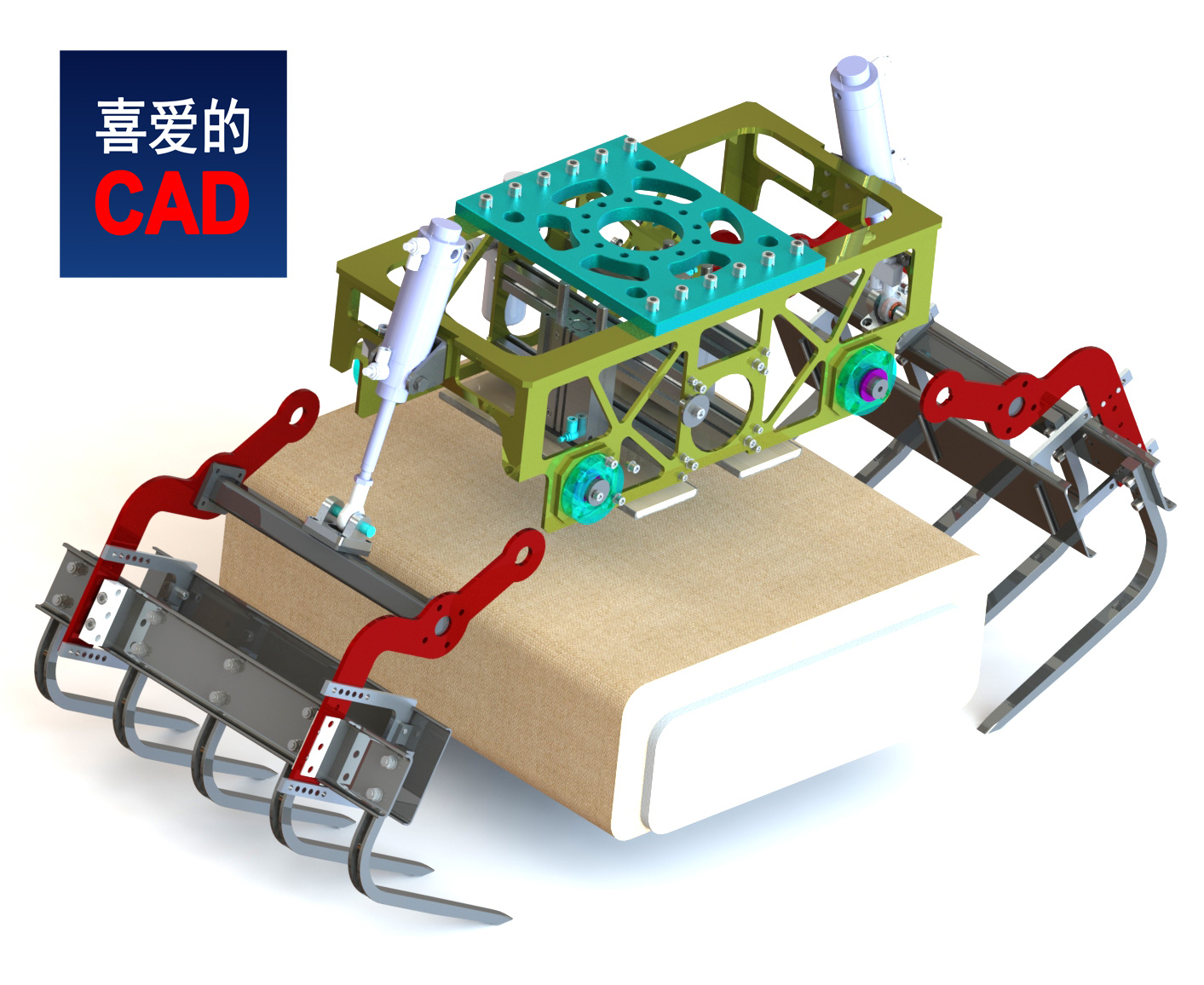
图3 码垛机器人手爪3D模型设计效果图
机器人码垛手爪 3D模型文件包含SolidWorks源文件及STEP通用格式。
 下载地址:
下载地址: 转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-2237.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 低温阀门 加长阀盖 (Extended Bonnet)是什么意思?
低温阀门 加长阀盖 (Extended Bonnet)是什么意思?- 看日本的机械制图,实在是太工整了,充满了美感,是一种享受
 顶部装车鹤管,蒸汽伴热带管道保温层,带气相返回管,带防溢探头
顶部装车鹤管,蒸汽伴热带管道保温层,带气相返回管,带防溢探头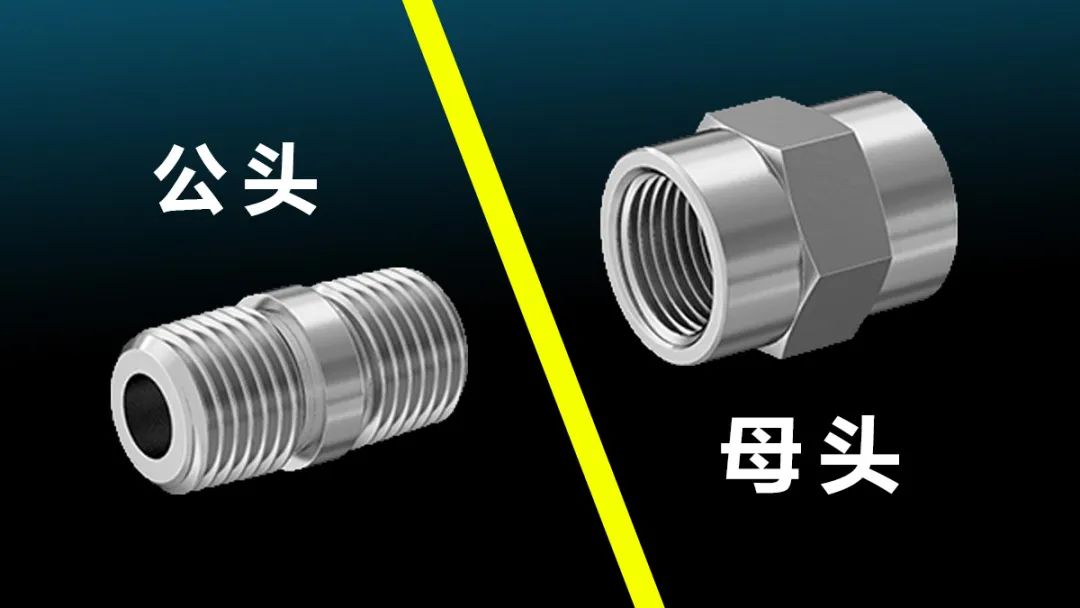 工程师太污了,公头母头这都是些什么名字啊,男女之间的画面感太强,不敢多想
工程师太污了,公头母头这都是些什么名字啊,男女之间的画面感太强,不敢多想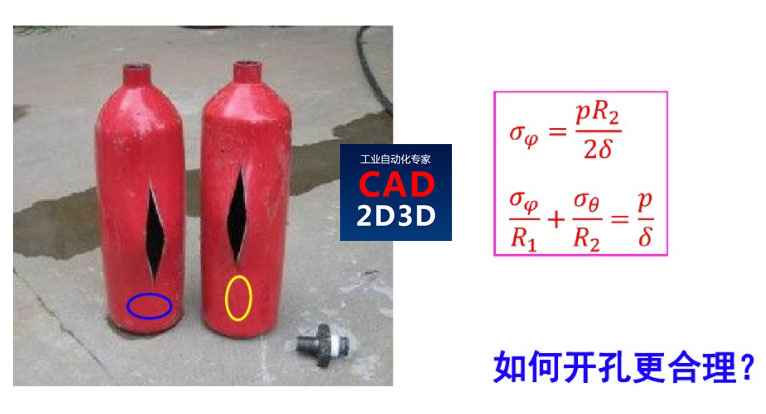 内压薄壁壳体的应力分析,圆筒形和球形周向和经向应力计算公式
内压薄壁壳体的应力分析,圆筒形和球形周向和经向应力计算公式 瑞典洛帝牢(NORD-LOCK)官网,专业的防松垫圈、螺母制造商
瑞典洛帝牢(NORD-LOCK)官网,专业的防松垫圈、螺母制造商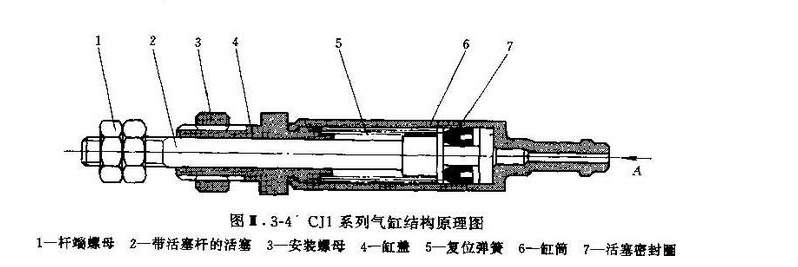 单作用气缸和双作用气缸的区别
单作用气缸和双作用气缸的区别 工业机器人从入门到高级教程 (视频)
工业机器人从入门到高级教程 (视频)- 机器人位置重复精度(Position repeat accuracy)定义解释以及日本 JIS B8432 标准、国际 ISO 9283 标准、中国 GB/T 12642 标准 百度网盘下载
- 环氧树脂板用途:电气绝缘和机械结构件(工装夹具)
 日本 NITTA 机器人柔性夹爪!如人手般温柔的抓住!可搬运最大重量1380g
日本 NITTA 机器人柔性夹爪!如人手般温柔的抓住!可搬运最大重量1380g
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载