
 CAD2D3D 官网服务器所有文件资源,3D模型、设计软件和案例视频等
CAD2D3D 官网服务器所有文件资源,3D模型、设计软件和案例视频等  机械手 Z 轴行程放大机构3D模型 SolidWorks 源文件免费
机械手 Z 轴行程放大机构3D模型 SolidWorks 源文件免费  LNG装车橇3D模型免费下载,SolidWorks源文件,STEP通用3D文件
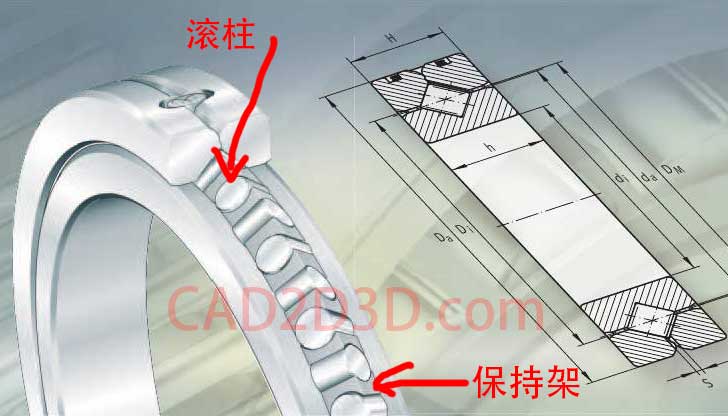
LNG装车橇3D模型免费下载,SolidWorks源文件,STEP通用3D文件 交叉滚柱轴环是一种滚子轴承,旋转精度高,可承载各个方向的负荷。由于具有直交排列的圆柱滚子,因此它可以承载各个方向的负荷。
1 特点优点
在交叉滚柱轴环中,因圆柱形滚柱在呈90的V形沟槽滚动面上通过间隔保持器被相互垂直排列,这种设计使得单个轴承就可承受径向载荷、轴向载荷及力矩载荷等所有方向的负荷。
尽管内外环的尺寸被最小限度地小型化,但是交叉滚柱轴环仍具有高刚性,所以最适合于工业用机器人的关节部或旋转部、加工中心机的旋转工作台、机械手旋转部、精密旋转工作台、医疗机器、测量仪、IC制造装置等的用途。
2 高旋转精度
因在垂直排列的滚柱间装有间隔保持器,防止了滚柱的侧倒或滚柱的相互摩擦,所以能防止旋转扭矩的增加。另外,与以往使用铁板保持器的类型相比,不会发生滚柱的一方接触现象或锁死现象。即使被施加预压,也能获得稳定的旋转运动。 并且,由于内环或外环是分割为2部分的构造,可以调整预压,所以可获得高精度的旋转运动。
3 操作容易
被分割的内环或外环,在装入滚柱和间隔保持器后,与交叉滚柱轴环固定在一起,以防止互相分离,故安装交叉滚柱轴环时操作十分简单。
4 防止滚柱侧倒
通过间隔保持器使滚柱间的相互摩擦消失,还防止了滚柱的侧倒,从而能获得稳定的旋转扭矩。滚柱 间隔保持器
5 大幅度地提高了刚性(比传统型号提高3~4倍)
与使用双列薄形角接触球轴承不同,由于滚柱为垂直交叉排列,因此只用1个交叉滚柱轴环就可承受各个方向的负荷,且刚性提高了3~4倍以上。
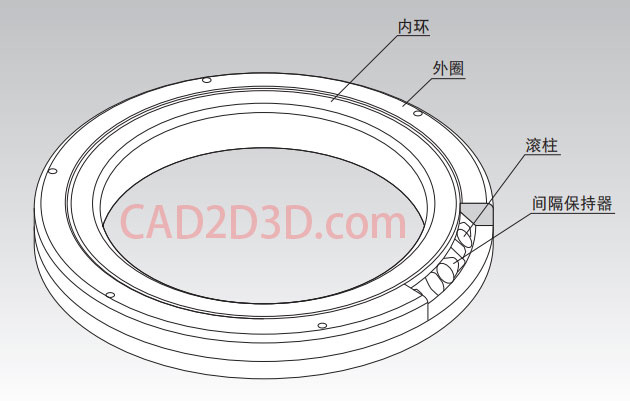
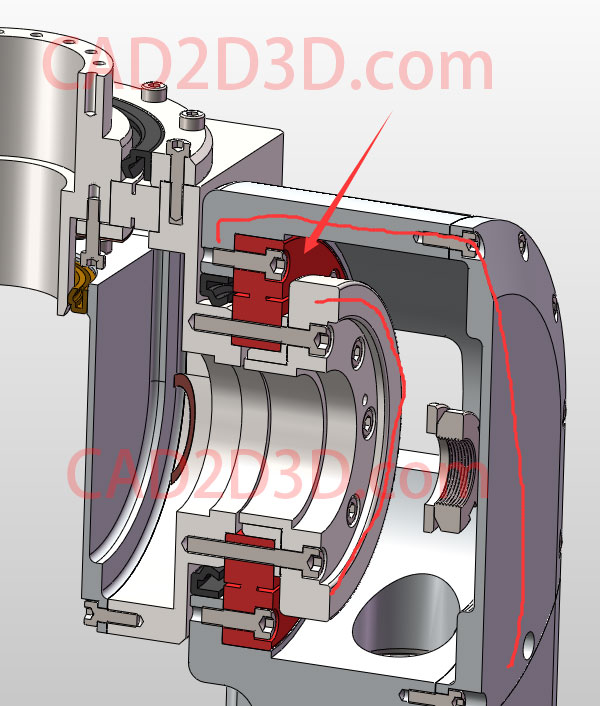
6 结构组成
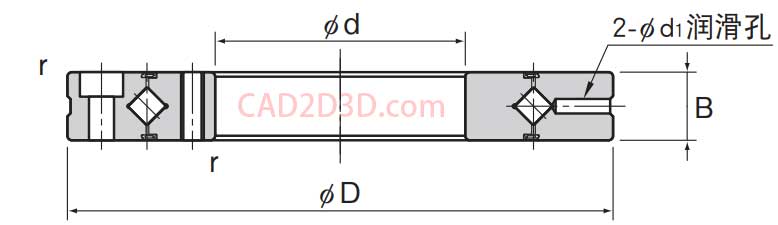
7 结构原理
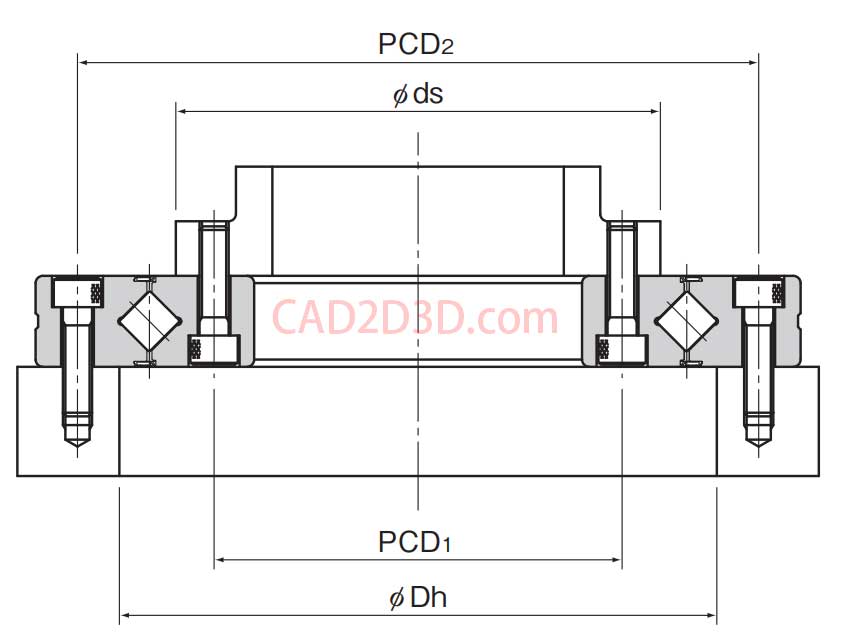
8 安装方式
9 工业机器人关节应用
应用在机器人关节处。
参考文献:https://www.thk.com/?q=cn/node/6546
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1199
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1199.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 USB接口类型大全及对应的传输速度,Type C原来也是USB
USB接口类型大全及对应的传输速度,Type C原来也是USB 冲击钻内部构造和运行原理,冲击钻零部件中英文名称对照
冲击钻内部构造和运行原理,冲击钻零部件中英文名称对照- 机器人学导论,Introduction to Robotics Mechanics and Control,美国斯坦福大学教材
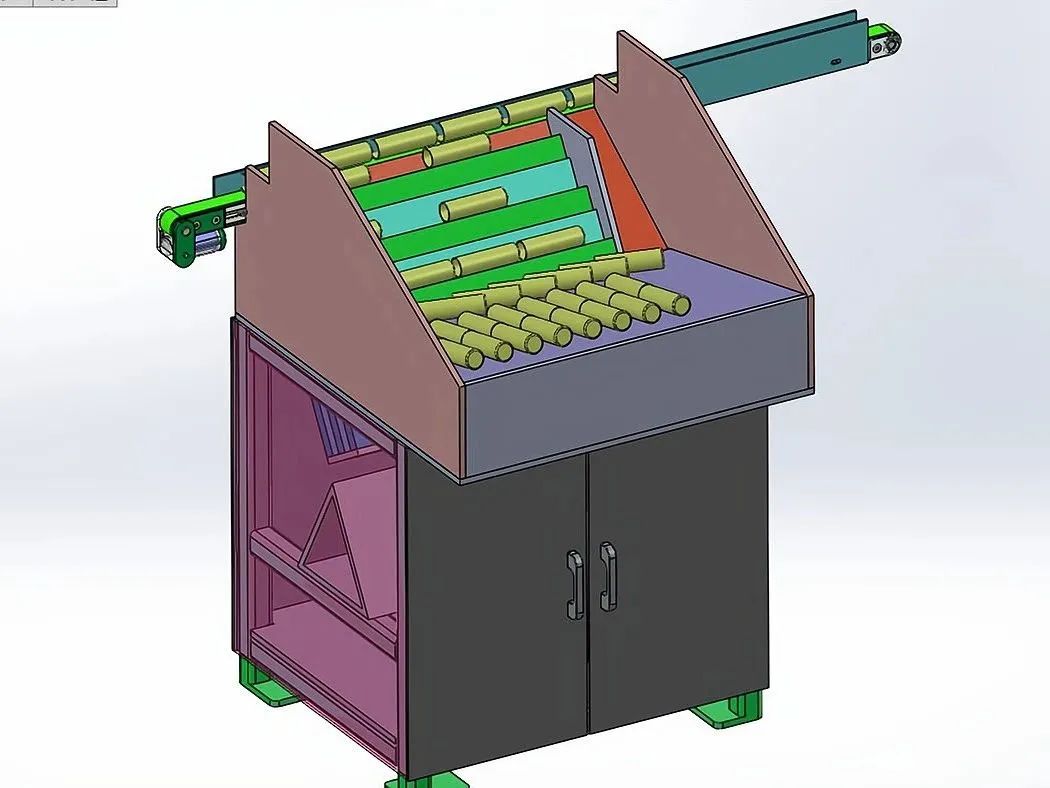 干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置
干货!推板上料机内部构造和运行原理详解,最常见的乱料上料装置 机床电主轴内部结构,刀具刀柄如何与主轴连接,如何实现快速换刀
机床电主轴内部结构,刀具刀柄如何与主轴连接,如何实现快速换刀- 外观最好看的机床,为了追求别致,连机器人都是倾斜安装的……
- 日本电产新宝官网,主营伺服马达专用减速机和高速精密自动冲床
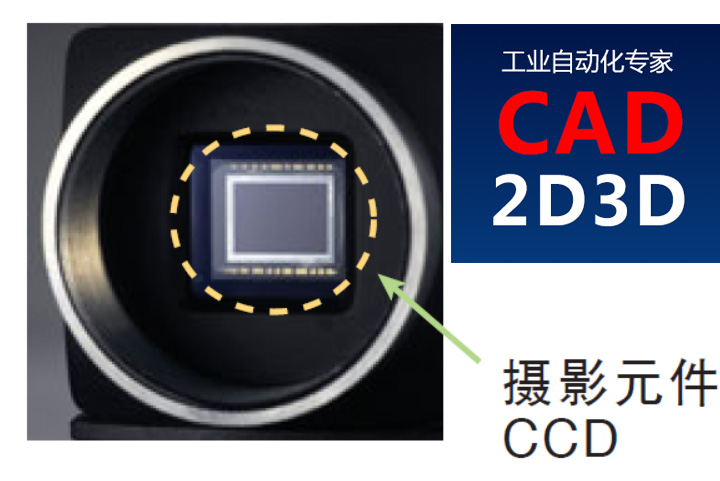 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理- 锻造自动化生产线(机器人上下料)如何设计,生产线难点以及潜在风险点和应对措施
- 快速换模系统4大件:模具夹紧器 / 油压式举模滑轨 / 移栽臂 / 换模台车
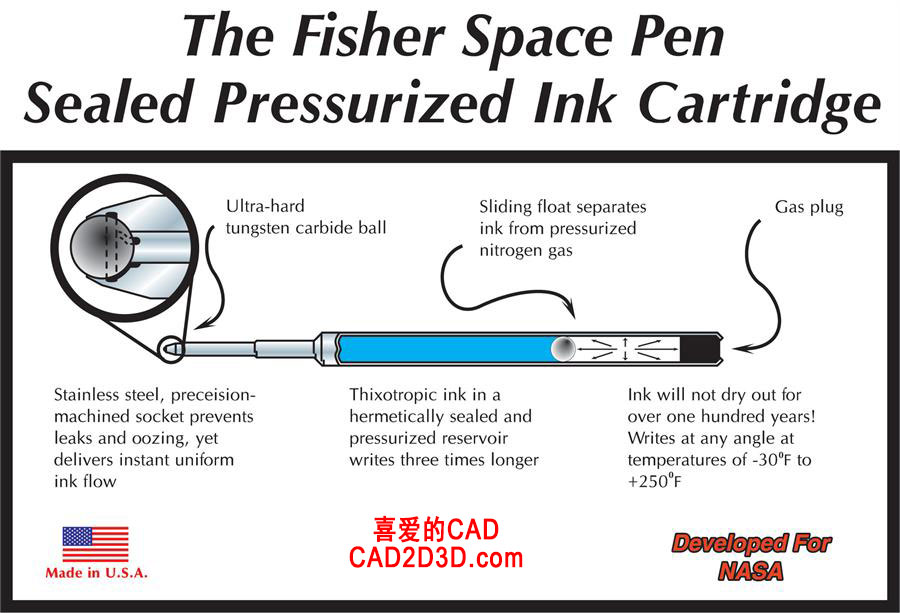 一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
 塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
 油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
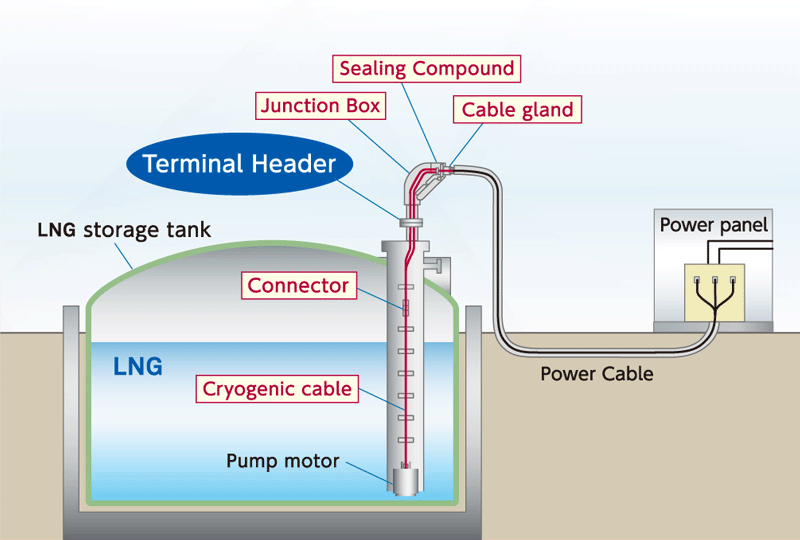 LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
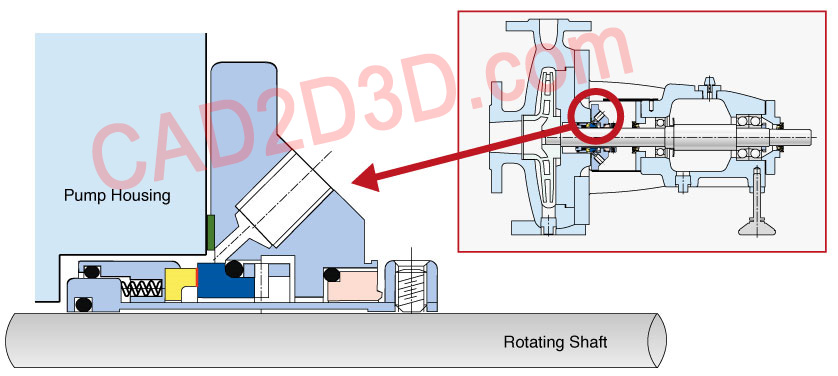 泵机械密封组成、内部构造和运行原理
泵机械密封组成、内部构造和运行原理
 减速机种类、特性及其优劣势
减速机种类、特性及其优劣势
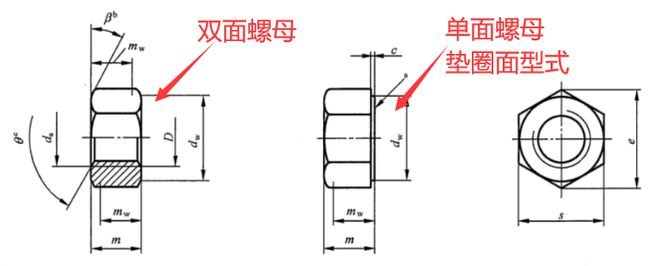 惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载