
与
电气设计 相关商品:
查看所有与
电气设计 相关商品 >>
 报建电气图纸专业电路施工图3d代画cad电力设计商场接线家工商场
报建电气图纸专业电路施工图3d代画cad电力设计商场接线家工商场  建筑施工图纸cad代画钢结构给排水设计装修报审报建电气消防暖通
建筑施工图纸cad代画钢结构给排水设计装修报审报建电气消防暖通  电气绘图eplan设计图纸代做西门子plc程序设计修复远程安装服务
电气绘图eplan设计图纸代做西门子plc程序设计修复远程安装服务 日本发那科机器人操作说明书。

FANUC Robot R-30iA 控制装置 Handing Tool 操作说明书百度网盘下载链接:https://pan.baidu.com/s/1rrpIv3GKBwbFP6c3Rpqk8w 提取码: vvby
操作说明书目录:
为了安全使用 s-1
安全预防措施 i
1 前言 1
1.1 有关说明书 1
2 概要 3
2.1 应用工具软件 4
2.1.1 设定系统.4
2.1.2 机器人的JOG 进给.4
2.1.3 程序.4
2.1.4 测试运转(测试执行) 5
2.1.5 自动运转(操作执行) 5
2.2 机器人 5
2.3 控制装置 6
2.3.1 示教操作盘.7
2.3.2 操作面板 15
2.3.3 遥控装置 16
2.3.4 CRT/KB 16
2.3.5 通信 16
2.3.6 I/O17
2.3.7 外围设备I/O 17
2.3.8 机器人的动作 17
2.3.9 急停装置 17
2.3.10 附加轴.18
3 设定机器人系统 19
3.1 I/O 19
3.1.1 数字 I/O 24
3.1.2 群组I/O 29
3.1.3 模拟I/O 32
3.2 机器人I/O 35
3.3 外围设备 I/O 38
3.4 操作面板 I/O 44
3.5 I/O 连接设备画面 47
3.5.1 I/O 连接设备一览画面 47
3.5.2 MODELB单元一览画面 48
3.5.3 信号数设定画面 49
3.6 I/O 连接功能 50
3.7 仿真跳过功能 51
3.8 设定自动运转 53
3.8.1 机器人启动请求(RSR) 54
3.8.2 程序号码选择(PNS) 56
3.8.3 STYLE启动 58
3.8.4 程序选择画面 61
3.8.5 单元接口I/O 67
3.9 设定坐标系 70
3.9.1 设定刀具坐标系 72
3.9.2 设定用户坐标系 80
3.9.3 设定JOG 坐标系 88
3.10 设定基准点 93
3.11 关节可动范围 96
3.12 用户报警 97
3.13 可变轴范围 98
3.14 防干涉区域功能 99
3.15 系统设定菜单 102
3.16 设定一般事项 108
3.17 其他设定 109
4 程序的构成 110
4.1 程序细节信息 111
4.1.1 程序名称 112
4.1.2 程序注解 113
4.1.3 副类型 113
4.1.4 动作群组 113
4.1.5 写保护 113
4.1.6 暂停忽略 114
4.1.7 堆栈大小 114
4.2 行号码、程序末尾记号和自变量 115
4.3 动作指令 117
4.3.1 动作类型 118
4.3.2 位置资料 119
4.3.3 移动速度 124
4.3.4 定位类型 126
4.3.5 动作附加指令 126
4.4 叠栈指令 135
4.4.1 叠栈指令 136
4.4.2 叠栈动作指令 136
4.4.3 叠栈结束指令 137
4.5 暂存器指令 137
4.5.1 暂存器指令 137
4.5.2 位置暂存器指令 139
4.5.3 位置暂存器要素指令 140
4.5.4 栈板暂存器运算指令 142
4.5.5 字符串暂存器、字符串指令 143
4.6 I/O 指令 146
4.6.1 数字I/O 指令 146
4.6.2 机器人I/O 指令 147
4.6.3 模拟I/O 指令 148
4.6.4 群组I/O 指令 149
4.7 转移指令 150
4.7.1 标签指令 150
4.7.2 程序结束指令 150
4.7.3 无条件转移指令 151
4.7.4 条件转移指令 151
4.7.5 自变量 154
4.8 等待指令 161
4.8.1 指定时间等待指令 161
4.8.2 条件等待指令 161
4.9 跳过条件指令 163
4.10 位置补偿条件指令 165
4.11 工具补偿条件指令 166
4.12 坐标系指令 166
4.13 程序控制指令 167
4.13.1 暂停指令 168
4.13.2 强制结束指令 168
4.14 其他指令 168
4.14.1 RSR 指令 169
4.14.2 用户报警指令 169
4.14.3 计时器指令 169
4.14.4 倍率指令 170
4.14.5 注解指令 170
4.14.6 注解指令(语言切换) 170
4.14.7 消息指令 171
4.14.8 参数指令 171
4.14.9 最高速度指令 173
4.15 多轴控制指令 174
4.15.1 程序执行指令 174
4.16 动作群组指令 174
4.16.1 非同步动作群组指令 175
4.16.2 同步动作群组指令 175
5 创建程序 176
5.1 设计程序 177
5.1.1 动作指令 177
5.1.2 预定位置 178
5.2 接通电源和JOG 进给 179
5.2.1 接通和断开电源 179
5.2.2 3 方式开关 180
5.2.3 机器人的JOG 进给 183
5.3 创建程序 189
5.3.1 记录程序 190
5.3.2 修改标准动作指令语句 193
5.3.3 示教动作指令 195
5.3.4 示教动作附加指令 196
5.3.5 示教控制指令 199
5.3.6 TP 启动禁止 204
5.4 修改程序 205
5.4.1 选择程序 206
5.4.2 修改动作指令 206
5.4.3 修改控制指令 214
5.4.4 程序编辑指令 215
5.5 程序操作 227
5.5.1 修改程序细节信息 227
5.6 背景编辑 231
5.7 特殊点检查功能 242
5.8 其他编辑功能 242
5.8.1 自动位置号码变更功能242
5.8.2 程序名称固定功能243
5.8.3 程序过滤器一览显示244
6 执行程序 245
6.1 程序的停止和恢复 245
6.1.1 通过急停操作来停止和恢复程序.245
6.1.2 通过HOLD 键来停止和恢复程序的方法246
6.1.3 通过报警来停止程序247
6.2 执行程序 249
6.2.1 启动程序.249
6.2.2 机器人的动作.250
6.2.3 从暂停状态启动程序253
6.3 测试运转 256
6.3.1 设定测试运转.256
6.3.2 逐步测试运转.258
6.3.3 连续测试运转.260
6.3.4 程序确认/监控262
6.4 I/O 的手动控制 263
6.4.1 强制输出.263
6.4.2 仿真输入/输出264
6.4.3 等待解除.265
6.5 机械手的手动操作 266
6.6 自动运转 267
6.6.1 基于机器人启动请求(RSR)的自动运转.268
6.6.2 基于程序号码选择(PNS)的自动运转.270
6.6.3 外部倍率选择功能271
6.7 即时位置修改 272
7 状态显示 277
7.1 示教操作盘LED 277
7.2 用户画面 278
7.3 暂存器 278
7.4 位置暂存器 279
7.5 栈板暂存器 281
7.6 串暂存器 282
7.7 现在位置 284
7.8 系统参数 286
7.9 程序计时器 287
7.10 运转计时器 288
7.11 执行历史记录 289
7.12 记忆体使用状态 290
8 输入/输出文件 292
8.1 文件输入/输出装置 292
8.1.1 存储卡294
8.1.2 USB 存储器.295
8.2 设定通信端口 298
8.3 文件 301
8.3.1 程序文件.301
8.3.2 标准指令文件.302
8.3.3 系统文件/应用程序文件302
8.3.4 数据文件.302
8.3.5 ASCII 文件302
8.4 保存文件 302
8.4.1 从程序一览画面保存数据303
8.4.2 从文件画面保存数据304
8.4.3 通过辅助菜单来保存文件307
8.4.4 文件操作.308
8.4.5 ASCII 保存310
8.5 载入文件.311
8.5.1 从程序一览画面载入程序文件.311
8.5.2 从文件画面载入文件312
8.6 打印文件 316
8.7 目录功能 319
8.8 自动备份功能 322
8.8.1 自动备份功能的特征322
8.8.2 可以使用的存储卡322
8.8.3 设定自动备份功能322
8.8.4 执行自动备份 (7DA3 系列或更早版) 324
8.8.5 执行自动备份 (7DA4 系列或更新版) 324
8.8.6 管理多个备份.326
8.8.7 载入备份326
8.9 图像备份功能 327
8.10 ASCII 程序载入功能.329
8.10.1 概要329
8.10.2 从示教操作盘载入ASCII 格式的程序330
8.10.3 浏览与ASCII 程序载入功能相关错误的方法.331
8.10.4 LS 文件例332
9 应用 334
9.1 宏指令 335
9.1.1 设定宏指令.335
9.1.2 执行宏指令.340
9.2 移转功能 343
9.2.1 程序移转功能.344
9.2.2 对称移转功能.348
9.2.3 角度输入移转功能352
9.3 坐标系更换移转功能 356
9.4 外力追踪功能 360
9.5 连续回转功能 365
9.6 位置暂存器先执行功能 370
9.7 动作群组DO输出功能 371
9.8 先执行指令功能 373
9.9 先执行距离指令 377
9.9.1 概要.377
9.9.2 规格.377
9.9.3 设定.378
9.9.4 指令.378
9.9.5 指令的示教操作385
9.9.6 限制事项/其他387
9.10 状态监视功能 388
9.11 自动误差恢复功能 395
9.11.1 概要.395
9.11.2 异常恢复功能的概略395
9.11.3 记录再启动程序397
9.11.4 示教RETURN_PATH_DSBL 指令398
9.11.5 设定异常恢复功能398
9.11.6 暂停中的程序被再启动时的流程图.404
9.11.7 异常恢复功能的手动操作画面.404
9.11.8 从示教操作盘执行再启动程序和测试方式.406
9.11.9 更改再启动程序的启动条件.406
9.11.10 其他规格和制约407
9.11.11 警告.408
9.12 遥控TCP 功能 408
9.12.1 功能概要.408
9.12.2 设定.410
9.13 高灵敏度碰撞保护功能 412
9.13.1 概要.412
9.13.2 规格.412
9.13.3 设定.413
9.13.4 碰撞保护设置画面413
9.13.5 程序指令.414
9.13.5.1 COL DETECT ON 指令 / COL DETECT OFF 指令.414
9.13.5.2 COL GUARD ADJUST 指令415
9.13.6 注意事项.416
9.14 负载设定功能 417
9.14.1 概要.417
9.14.2 动作性能画面.417
9.14.3 程序指令.418
9.15 负载估计功能 419
9.15.1 概要.419
9.15.2 操作步骤.419
9.15.3 负载估计的步骤(面向6 轴机器人).419
9.15.4 校正的步骤(面向6 轴机器人).422
9.15.5 其他相关事项.424
9.16 附加轴碰撞保护功能 425
9.16.1 概要.425
9.16.2 注意事项.425
9.16.3 初始设定.425
9.16.4 调节灵敏度.425
9.17 重力补偿功能 426
9.17.1 系统变量.426
9.17.2 动作性能画面.427
9.17.3 调校.428
9.18 密码功能 428
9.18.1 密码功能概要.428
9.18.2 安装用户的密码操作429
9.18.3 使密码功能无效431
9.18.4 程序师用户以及设定者用户的密码操作.431
9.18.5 密码设定文件.434
9.18.5.1 概要 434
9.18.6 密码设定文件的XML 句法435
9.18.7 密码日志.438
9.18.8 对应密码等级的画面限制439
9.18.9 密码自动登入功能442
9.18.10 USB 密码功能.443
9.19 复合运算功能 445
9.20 PMC 监控功能 457
9.21 PMC 编辑功能 459
9.22 操作记录功能 461
9.22.1 概要.461
9.22.2 将被记录的事件463
9.22.3 设定操作记录簿466
9.22.4 操作.467
9.22.5 扩展的报警履历471
9.22.5.1 设定方法 471
9.23 原始路径再继续功能 473
9.24 程序工具箱 477
9.24.1 软极限设定.478
9.25 高性能轨迹恒定控制功能 480
9.25.1 概要.480
9.25.2 直线距离指定功能480
9.25.2.1 直线距离指定功能的使用方法481
9.25.2.2 直线距离指定功能的制约483
9.25.2.3 直线距离指定功能的使用步骤483
9.25.3 拐角范围指定功能484
9.25.3.1 对半径长度的CRy484
9.25.3.2 示教技术 485
9.25.3.3 对动作速度变化的轨迹恒定控制485
9.25.3.4 兼容性和制约 485
9.25.3.5 处理速度高速化功能487
9.25.3.6 制约 489
9.25.4 直线最高速功能489
9.25.4.1 制约 490
9.26 高性能外力追踪功能 490
9.26.1 概要.490
9.26.2 与以往的外力追踪功能的关系.490
9.26.3 操作步骤.491
9.26.4 外力追踪的技能493
9.26.5 直角外力追踪的技能495
9.27 多任务功能 496
9.27.1 概要.496
9.27.2 功能.496
9.27.2.1 创建程序时的注意事项496
9.27.2.2 多任务的启动方法 497
9.27.2.3 母程序与子程序相关的动作497
9.27.2.4 母程序与子程序相关的注意点498
9.27.3 监视.498
9.27.4 暂停、强制结束499
9.27.5 关于循环停止信号(CSTOPI).500
9.28 异常等级设定功能 500
9.28.1 异常等级的概要500
9.28.2 异常等级的详细500
9.29 异常时状态记录功能 503
9.30 多任务用自动异常恢复功能 504
9.30.1 概要.504
9.30.2 自动误差恢复功能505
9.30.3 再启动程序功能505
9.30.4 维修程序功能.505
9.30.5 再启动程序指令506
9.30.6 再启动动作无效指令508
9.30.7 维修程序指令.509
9.30.8 自动异常恢复功能的设定511
9.30.9 再启动程序功能的手动操作画面.520
9.30.10 从示教操作盘执行再启动程序和测试模式.522
9.30.11 变更再启动程序的启动条件.522
9.30.12 其他规格和制约522
9.30.13 警告(请务必仔细阅读) 523
9.31 距离指定信号输出功能 523
9.32 附加轴伺服OFF(局部停止)功能 529
9.32.1 概要.529
9.32.2 规格.529
9.32.3 制约.531
9.32.4 设定.531
9.32.5 注意事项.535
9.32.6 程序例.536
9.33 断续滚焊功能 539
9.33.1 概要.539
9.33.2 规格.539
9.33.2.1 指令 539
9.33.2.2 断续滚焊条件 539
9.33.2.3 断续滚焊处理流程 541
9.33.2.4 其他 542
9.33.3 调整.543
9.33.4 限制.544
9.33.5 附录.545
9.34 双驱动功能 545
9.34.1 双驱动功能的概要545
9.34.2 双驱动功能的设定546
9.35 2 台控制功能 547
9.35.1 功能概要.547
9.35.1.1 规格 548
9.35.1.2 选项 548
9.35.2 操作面板.549
9.35.2.1 电池异常 549
9.35.2.2 示教操作盘有效 549
9.35.2.3 报警 549
9.35.2.4 遥控运转中 549
9.35.2.5 遥控/本地键 549
9.35.2.6 报警解除 550
9.35.2.7 启动 550
9.35.2.8 暂停 550
9.35.2.9 用户1/用户2 550
9.35.2.10 连接/分离键 550
9.35.3 外围设备输入输出信号551
9.35.3.1 信号的变更、追加 551
9.35.3.2 HOLD#1、#2552
9.35.3.3 START#1、#2552
9.35.3.4 RSR 553
9.35.3.5 PNSTROBE#1、#2、PROD_START#1、#2 .553
9.35.3.6 CMDENBL#1、#2553
9.35.3.7 SYSRDY#1、#2553
9.35.3.8 ATPERCH 553
9.35.3.9 PROGRUN#1、#2、PAUSED#1、#2 .553
9.35.3.10 HELD#1、#2554
9.35.3.11 FAULT#1、#2554
9.35.4 机器人输入输出信号554
9.35.5 机器人的切换.555
9.35.6 程序的选择.556
9.35.7 位置示教、位置修正557
9.35.8 程序的启动.558
9.35.8.1 通过示教操作盘启动558
9.35.8.2 通过操作面板启动 558
9.35.8.3 程序的并行执行 558
9.35.8.4 执行中/暂停中的程序选择559
9.35.8.5 通过RSR启动 559
9.35.8.6 外部程序选择(选项)559
9.35.9 程序的停止.560
9.35.9.1 通过示教操作盘停止560
9.35.9.2 通过操作面板停止 560
9.35.9.3 通过专用信号停止(中断)560
9.35.9.4 通过专用信号停止(强制结束)561
9.35.10 处理I/O印刷电路板561
9.35.11 I/O的分配.562
9.35.12 系统变量.563
9.36 机器人分离功能 564
9.36.1 功能概要.564
9.36.1.1 规格 564
9.36.2 操作方法.564
9.36.2.1 操作面板 564
9.36.2.2 SOP564
9.36.3 系统变量$ROBOT_ISOLC .565
9.36.4 对动作指令语句的示教566
9.37 UOP扩展功能 566
9.37.1 功能概要.566
9.37.1.1 规格 566
9.37.1.2 选项 566
9.37.1.3 与2台控制功能(J605)的UOP间的差异567
9.37.2 外围设备I/O 567
9.37.2.1 要使用的UOP组数的设定569
9.37.2.2 信号的变更和追加 569
9.37.2.3 PMC 571
9.37.2.4 HOLD#1~#N572
9.37.2.5 CSTOPI#1~#N572
9.37.2.6 START#1~#N572
9.37.2.7 RSR 573
9.37.2.8 PNSTROBE#1~#N、PROD_START#1~#N .573
9.37.2.9 CMDENBL#1~#N573
9.37.2.10 SYSRDY#1~#N573
9.37.2.11 PROGRUN#1~#N、PAUSED#1~#N .574
9.37.2.12 HELD#1~#N574
9.37.2.13 FAULT#1~#N574
9.37.2.14 ATPERCH 574
9.37.3 程序的选择.574
9.37.3.1 UOP组作为对象的动作群组的设定575
9.37.3.2 执行中/暂停中的程序选择576
9.37.3.3 动作群组切换时的编辑画面显示577
9.37.4 程序的启动.577
9.37.4.1 通过RSR启动 577
9.37.4.2 通过PNS启动 578
9.37.5 程序的停止.578
9.37.5.1 通过专用信号停止(中断)578
9.37.5.2 通过专用信号停止(强制结束)578
9.37.5.3 其他 578
9.37.6 系统变量.578
9.38 错误代码输出功能 580
9.38.1 功能概要.580
9.38.2 规格.580
9.38.2.1 报警的种类 580
9.38.2.2 输入输出信号 581
9.38.3 报警代码的含义582
9.38.3.1 报警的等级 582
9.38.3.2 报警ID(报警的种类).583
9.38.3.3 报警号码 584
9.39 数据监视功能 584
9.39.1 数据监视器的设定586
9.39.2 数据监视器条件591
9.39.3 程序.594
9.39.4 数据监视器图.594
9.40 制动器诊断功能 595
9.40.1 功能概要.595
9.40.2 进行制动器诊断前的事前设定.595
9.40.3 制动器诊断开始596
9.40.4 制动器诊断结果597
9.40.5 限制.597
9.40.6 注意事项.597
9.41 操作面板创建功能 598
9.41.1 概要.598
9.41.2 软件的说明.598
9.41.3 硬件的说明.598
9.41.4 设定方法.598
9.41.4.1 设定的概略 598
9.41.4.2 可追加的iPendant 控制600
9.41.4.3 Fast Label 的设定 601
9.41.4.4 Fast Lamp 的设定 603
9.41.4.5 Fast Switch 的设定 605
9.41.4.6 Button Change 控制的追加.605
9.41.4.7 Command Button 控制的追加609
9.41.4.8 EditBox 控制的追加609
9.41.4.9 Label 控制的追加 610
9.41.4.10 Toggle Button 控制的追加611
9.41.4.11 Toggle Lamp 控制的追加.612
9.41.4.12 面板的修改 614
9.41.4.13 控制的修改 615
9.41.4.14 控制的删除 616
9.41.4.15 控制的移动及复制 617
9.41.4.16 页面的修改 618
9.41.4.17 面板的重新创建 619
9.41.5 从面板启动KAREL 程序.620
9.41.5.1 创建KAREL 程序时的注意事项.620
9.41.5.2 启动按钮的创建 620
9.41.6 使用方法.621
9.41.6.1 面板的显示 621
9.41.6.2 保存/加载 622
9.42 扩展对称移转(镜像位移)功能 623
9.42.1 平行对称移转.624
9.42.2 旋转对称移转.626
9.42.3 使用了现有坐标系和对称面的姿势控制对称移转.627
9.42.4 带有附加轴的对称移转628
9.43 关于KAREL 活用支援功能 636
9.43.1 功能概要.636
9.43.2 关于KAREL 程序设定画面.636
9.43.2.1 KAREL 设定画面的启动636
9.43.2.2 KAREL 程序的登录方法637
9.43.2.3 执行方法 638
9.43.2.4 强制结束方法 639
9.43.2.5 启动方法的设定 641
9.43.2.6 关于细节画面 642
9.43.2.7 细节画面的注意事项以及限制事项644
9.43.2.8 关于再启动 644
9.43.3 自定义菜单.645
9.43.3.1 自定义菜单的启动 645
9.43.3.2 自定义菜单的设定 646
9.43.3.3 设定内容的删除 648
9.44 KAREL 程序执行履历记录功能 650
9.44.1 功能概要.650
9.44.2 硬件及软件.650
9.44.2.1 硬件及软件要件 650
9.44.2.2 硬件 650
9.44.2.3 软件 651
9.44.2.4 性能 651
9.44.3 设定及操作.651
9.44.3.1 KAREL 程序执行履历记录功能的设定651
9.44.3.2 输出方法的选择画面651
9.44.3.3 任务选择画面 652
9.44.3.4 记录的停止画面 654
9.44.3.5 选择中任务一览画面655
9.44.3.6 事件等级的选择画面655
9.44.3.7 事件选择 657
9.44.3.8 全部事件记录的有效化或无效化658
9.44.4 事件的记录.659
9.44.4.1 事件的设定 659
9.44.4.2 将事件记录到ASCII 文件中660
9.44.4.3 ASCII 文件:一般的事件信息.660
9.44.4.4 ASCII 文件:事件固有的信息.661
9.44.5 附录.664
9.44.5.1 概要 664
9.44.5.2 KAREL 程序例 664
9.44.5.3 TP 程序例 665
9.44.5.4 ASCII 文件示例 665
9.45 扭矩极限功能 666
9.45.1 概要.666
9.45.2 扭矩极限功能的使用方法667
9.45.3 扭矩极限功能的多个轴个别设定功能的使用方法.668
9.45.3.1 程序的创建方法 668
9.45.3.2 扭矩极限功能的多个轴个别设定功能的报警668
9.45.4 限制事项.669
9.45.5 注意事项.669
9.46 机器人速度输出功能 669
9.46.1 概要.669
9.46.2 制约.670
9.46.3 设定.670
9.46.4 示教.672
10 叠栈功能 674
10.1 叠栈功能 674
10.2 叠栈指令 676
10.3 示教叠栈 677
10.3.1 选择叠栈指令.678
10.3.2 输入初期资料.679
10.3.3 示教堆上式样.684
10.3.4 设定经路式样条件690
10.3.5 示教经路式样.692
10.3.6 叠栈示教时的注意事项695
10.4 执行叠栈 695
10.4.1 栈板暂存器.696
10.4.2 控制基于栈板暂存器的叠栈.698
10.5 修改叠栈 698
10.6 带有附加轴的叠栈 700
10.7 叠栈自由示教 700
11 FANUC i Pendant 703
11.1 概要 703
11.2 外观和操作方法 704
11.2.1 外观和开关.704
11.2.2 键控开关.705
11.2.3 触控板.706
11.2.4 状态窗口.706
11.2.5 画面的分割方法707
11.2.6 操作对象画面的移动方法709
11.2.7 浏览器画面.709
11.2.8 画面选择以及菜单编辑画面的画面菜单.712
11.2.9 状态辅助窗口.713
11.2.9.1 现在位置显示 713
11.2.9.2 操作面板状态显示 714
11.2.9.3 安全信号状态显示 714
11.2.10 根据每一异常重要程度的彩色显示.714
11.2.11 背光灯的自动消失715
11.2.12 操作上的限制事项716
11.2.13 USB 端口(软件选项、带有USB 功能的新型iPendant 专用) .716
11.2.14 7DA5 系列或更新版上的操作性改良716
11.2.14.1 图标菜单 717
11.2.14.2 图标编辑器 721
11.2.14.3 光标移动 724
11.2.14.4 调用程序指令的输入726
11.2.14.5 宏指令的输入 726
11.2.14.6 编辑行的显示 727
11.2.14.7 调用目的地程序的显示727
11.2.14.8 宽画面 728
11.2.14.9 画面最大化 728
11.3 iPendant 设定 730
11.4 软体面板 737
11.4.1 概要.737
11.4.2 基本操作.738
11.4.3 使用者认定功能的设定740
11.4.4 面板的设定.741
11.4.4.1 面板的设定画面 741
11.4.4.2 设定项目的选择 743
11.4.4.3 项目的设定 744
11.4.4.4 面板有效条件的设定746
11.4.4.5 设定的结束 746
11.4.4.6 设定内容的保存和读出747
11.4.4.7 暂存器面板 748
11.4.5 限制事项750
12 伺服换刀功能 751
12.1 概要 751
12.1.1 功能的特点.751
12.1.2 基本规格.751
12.1.3 限制事项.751
12.1.4 系统的配置.753
12.1.5 导入的概要.754
12.2 初期设定 755
12.3 刀具暂时连结 755
12.4 换刀设定 757
12.5 设定参考点 761
12.5.1 无电池类型的情形761
12.5.2 电池安装类型的情形761
12.6 换刀指令 761
12.6.1 TOOL DETACH(刀具分离)指令.762
12.6.2 TOOL ATTACH(刀具连结)指令.762
12.6.3 程序例.762
12.6.4 前进执行(FWD) .762
12.6.5 后退执行(BWD) .763
12.7 换刀 顺序 764
12.8 换刀 状态显示 764
12.9 程序的示教 765
12.9.1 示教时的注意事项765
12.9.2 程序例.766
12.10 换刀专用画面构成表 766
12.11 换刀初期设定方法 767
12.11.1 伺服刀具轴的运动参数设定.767
12.11.2 伺服刀具轴和刀具号码的分配.767
12.11.3 系统变量的设定768
12.12 换刀参考点设定方法(无电池类型) 768
12.12.1 位置校准类型3、4 的参考点设定 768
12.12.2 位置校准类型5、6的参考点设定 770
12.12.3 设定简易调校参考点 771
12.13 故障排除 772
12.13.1 尚未连结刀具时执行了连结指令时 772
12.13.2 位置校准动作中停下机器人时 773
12.13.3 位置校准动作失败时 773
12.13.4 连结了与连结指令中所指定的刀具不同的刀具时 773
12.13.5 错误地(不用分离指令)分离所连结的刀具时 774
12.13.6 已被分离的刀具的轴移动时 774
12.13.7 电池的电压下降时 774
12.13.8 刀具分离期间电池耗尽时 775
附录
A 画面和程序指令 779
A.1 菜单一览 779
A.2 画面的种类 784
A.3 程序指令一览 804
A.4 程序指令 807
A.4.1 动作指令 807
A.4.2 动作附加指令 808
A.4.3 暂存器指令和I/O 指令 809
A.4.4 条件转移指令 810
A.4.5 等待指令 811
A.4.6 无条件转移指令 812
A.4.7 程序控制指令 812
A.4.8 其他指令 812
A.4.9 跳过和位置补偿指令 813
A.4.10 坐标系设定指令 814
A.4.11 宏指令 814
A.4.12 多轴控制指令 815
A.4.13 位置暂存器先执行指令 815
A.4.14 外力追踪指令 815
A.4.15 状态监视指令 815
A.4.16 动作群组指令 816
A.4.17 叠栈指令.816
B 特殊操作 817
B.1 开机方式 817
B.1.1 开机方式的种类817
B.1.2 初始开机.818
B.1.3 控制开机.819
B.1.4 冷开机.820
B.1.5 热开机.821
B.2 校正 822
B.2.1 夹具位置校正 823
B.2.2 零位校正(对合标记校正) 824
B.2.3 快速校正 826
B.2.4 单轴校正 828
B.2.5 输入校正数据 830
B.3 软件版本数 831
B.4 机器人各轴状态 833
B.5 诊断画面 838
B.5.1 概要.838
B.5.2 有关减速机诊断838
B.5.3 操作步骤 838
B.5.4 各条目 839
B.6 全局坐标系原点 842
B.7 设定I/O 模块 842
B.8 有关FSSB 路径设定 846
B.8.1 FSSB路径的定义846
B.8.2 设定1(FSSB 路径) 847
B.8.3 设定2(FSSB 第1 路径的总轴数)848
B.8.4 设定3(硬件开始轴号码)848
B.8.5 设定例.849
B.8.5.1 设定例1 849
B.8.5.2 设定例2 849
B.8.5.3 设定例3 850
B.9 定位器启动步骤 850
B.10 附加轴启动步骤 857
B.11 独立附加轴(Independent Axes)启动步骤 863
C 系统参数 868
C.1 系统参数表的查阅方法 868
C.2 系统参数 869
D 调查数据获取步骤(R-30iA 用) 885
D.1 异常时状态记录的保存方法 887
D.2 调查记录的保存方法 888
D.3 全部备份的保存方法 889
D.4 图像备份的执行方法 891
E 术语表 893
安全预防措施 i
1 前言 1
1.1 有关说明书 1
2 概要 3
2.1 应用工具软件 4
2.1.1 设定系统.4
2.1.2 机器人的JOG 进给.4
2.1.3 程序.4
2.1.4 测试运转(测试执行) 5
2.1.5 自动运转(操作执行) 5
2.2 机器人 5
2.3 控制装置 6
2.3.1 示教操作盘.7
2.3.2 操作面板 15
2.3.3 遥控装置 16
2.3.4 CRT/KB 16
2.3.5 通信 16
2.3.6 I/O17
2.3.7 外围设备I/O 17
2.3.8 机器人的动作 17
2.3.9 急停装置 17
2.3.10 附加轴.18
3 设定机器人系统 19
3.1 I/O 19
3.1.1 数字 I/O 24
3.1.2 群组I/O 29
3.1.3 模拟I/O 32
3.2 机器人I/O 35
3.3 外围设备 I/O 38
3.4 操作面板 I/O 44
3.5 I/O 连接设备画面 47
3.5.1 I/O 连接设备一览画面 47
3.5.2 MODELB单元一览画面 48
3.5.3 信号数设定画面 49
3.6 I/O 连接功能 50
3.7 仿真跳过功能 51
3.8 设定自动运转 53
3.8.1 机器人启动请求(RSR) 54
3.8.2 程序号码选择(PNS) 56
3.8.3 STYLE启动 58
3.8.4 程序选择画面 61
3.8.5 单元接口I/O 67
3.9 设定坐标系 70
3.9.1 设定刀具坐标系 72
3.9.2 设定用户坐标系 80
3.9.3 设定JOG 坐标系 88
3.10 设定基准点 93
3.11 关节可动范围 96
3.12 用户报警 97
3.13 可变轴范围 98
3.14 防干涉区域功能 99
3.15 系统设定菜单 102
3.16 设定一般事项 108
3.17 其他设定 109
4 程序的构成 110
4.1 程序细节信息 111
4.1.1 程序名称 112
4.1.2 程序注解 113
4.1.3 副类型 113
4.1.4 动作群组 113
4.1.5 写保护 113
4.1.6 暂停忽略 114
4.1.7 堆栈大小 114
4.2 行号码、程序末尾记号和自变量 115
4.3 动作指令 117
4.3.1 动作类型 118
4.3.2 位置资料 119
4.3.3 移动速度 124
4.3.4 定位类型 126
4.3.5 动作附加指令 126
4.4 叠栈指令 135
4.4.1 叠栈指令 136
4.4.2 叠栈动作指令 136
4.4.3 叠栈结束指令 137
4.5 暂存器指令 137
4.5.1 暂存器指令 137
4.5.2 位置暂存器指令 139
4.5.3 位置暂存器要素指令 140
4.5.4 栈板暂存器运算指令 142
4.5.5 字符串暂存器、字符串指令 143
4.6 I/O 指令 146
4.6.1 数字I/O 指令 146
4.6.2 机器人I/O 指令 147
4.6.3 模拟I/O 指令 148
4.6.4 群组I/O 指令 149
4.7 转移指令 150
4.7.1 标签指令 150
4.7.2 程序结束指令 150
4.7.3 无条件转移指令 151
4.7.4 条件转移指令 151
4.7.5 自变量 154
4.8 等待指令 161
4.8.1 指定时间等待指令 161
4.8.2 条件等待指令 161
4.9 跳过条件指令 163
4.10 位置补偿条件指令 165
4.11 工具补偿条件指令 166
4.12 坐标系指令 166
4.13 程序控制指令 167
4.13.1 暂停指令 168
4.13.2 强制结束指令 168
4.14 其他指令 168
4.14.1 RSR 指令 169
4.14.2 用户报警指令 169
4.14.3 计时器指令 169
4.14.4 倍率指令 170
4.14.5 注解指令 170
4.14.6 注解指令(语言切换) 170
4.14.7 消息指令 171
4.14.8 参数指令 171
4.14.9 最高速度指令 173
4.15 多轴控制指令 174
4.15.1 程序执行指令 174
4.16 动作群组指令 174
4.16.1 非同步动作群组指令 175
4.16.2 同步动作群组指令 175
5 创建程序 176
5.1 设计程序 177
5.1.1 动作指令 177
5.1.2 预定位置 178
5.2 接通电源和JOG 进给 179
5.2.1 接通和断开电源 179
5.2.2 3 方式开关 180
5.2.3 机器人的JOG 进给 183
5.3 创建程序 189
5.3.1 记录程序 190
5.3.2 修改标准动作指令语句 193
5.3.3 示教动作指令 195
5.3.4 示教动作附加指令 196
5.3.5 示教控制指令 199
5.3.6 TP 启动禁止 204
5.4 修改程序 205
5.4.1 选择程序 206
5.4.2 修改动作指令 206
5.4.3 修改控制指令 214
5.4.4 程序编辑指令 215
5.5 程序操作 227
5.5.1 修改程序细节信息 227
5.6 背景编辑 231
5.7 特殊点检查功能 242
5.8 其他编辑功能 242
5.8.1 自动位置号码变更功能242
5.8.2 程序名称固定功能243
5.8.3 程序过滤器一览显示244
6 执行程序 245
6.1 程序的停止和恢复 245
6.1.1 通过急停操作来停止和恢复程序.245
6.1.2 通过HOLD 键来停止和恢复程序的方法246
6.1.3 通过报警来停止程序247
6.2 执行程序 249
6.2.1 启动程序.249
6.2.2 机器人的动作.250
6.2.3 从暂停状态启动程序253
6.3 测试运转 256
6.3.1 设定测试运转.256
6.3.2 逐步测试运转.258
6.3.3 连续测试运转.260
6.3.4 程序确认/监控262
6.4 I/O 的手动控制 263
6.4.1 强制输出.263
6.4.2 仿真输入/输出264
6.4.3 等待解除.265
6.5 机械手的手动操作 266
6.6 自动运转 267
6.6.1 基于机器人启动请求(RSR)的自动运转.268
6.6.2 基于程序号码选择(PNS)的自动运转.270
6.6.3 外部倍率选择功能271
6.7 即时位置修改 272
7 状态显示 277
7.1 示教操作盘LED 277
7.2 用户画面 278
7.3 暂存器 278
7.4 位置暂存器 279
7.5 栈板暂存器 281
7.6 串暂存器 282
7.7 现在位置 284
7.8 系统参数 286
7.9 程序计时器 287
7.10 运转计时器 288
7.11 执行历史记录 289
7.12 记忆体使用状态 290
8 输入/输出文件 292
8.1 文件输入/输出装置 292
8.1.1 存储卡294
8.1.2 USB 存储器.295
8.2 设定通信端口 298
8.3 文件 301
8.3.1 程序文件.301
8.3.2 标准指令文件.302
8.3.3 系统文件/应用程序文件302
8.3.4 数据文件.302
8.3.5 ASCII 文件302
8.4 保存文件 302
8.4.1 从程序一览画面保存数据303
8.4.2 从文件画面保存数据304
8.4.3 通过辅助菜单来保存文件307
8.4.4 文件操作.308
8.4.5 ASCII 保存310
8.5 载入文件.311
8.5.1 从程序一览画面载入程序文件.311
8.5.2 从文件画面载入文件312
8.6 打印文件 316
8.7 目录功能 319
8.8 自动备份功能 322
8.8.1 自动备份功能的特征322
8.8.2 可以使用的存储卡322
8.8.3 设定自动备份功能322
8.8.4 执行自动备份 (7DA3 系列或更早版) 324
8.8.5 执行自动备份 (7DA4 系列或更新版) 324
8.8.6 管理多个备份.326
8.8.7 载入备份326
8.9 图像备份功能 327
8.10 ASCII 程序载入功能.329
8.10.1 概要329
8.10.2 从示教操作盘载入ASCII 格式的程序330
8.10.3 浏览与ASCII 程序载入功能相关错误的方法.331
8.10.4 LS 文件例332
9 应用 334
9.1 宏指令 335
9.1.1 设定宏指令.335
9.1.2 执行宏指令.340
9.2 移转功能 343
9.2.1 程序移转功能.344
9.2.2 对称移转功能.348
9.2.3 角度输入移转功能352
9.3 坐标系更换移转功能 356
9.4 外力追踪功能 360
9.5 连续回转功能 365
9.6 位置暂存器先执行功能 370
9.7 动作群组DO输出功能 371
9.8 先执行指令功能 373
9.9 先执行距离指令 377
9.9.1 概要.377
9.9.2 规格.377
9.9.3 设定.378
9.9.4 指令.378
9.9.5 指令的示教操作385
9.9.6 限制事项/其他387
9.10 状态监视功能 388
9.11 自动误差恢复功能 395
9.11.1 概要.395
9.11.2 异常恢复功能的概略395
9.11.3 记录再启动程序397
9.11.4 示教RETURN_PATH_DSBL 指令398
9.11.5 设定异常恢复功能398
9.11.6 暂停中的程序被再启动时的流程图.404
9.11.7 异常恢复功能的手动操作画面.404
9.11.8 从示教操作盘执行再启动程序和测试方式.406
9.11.9 更改再启动程序的启动条件.406
9.11.10 其他规格和制约407
9.11.11 警告.408
9.12 遥控TCP 功能 408
9.12.1 功能概要.408
9.12.2 设定.410
9.13 高灵敏度碰撞保护功能 412
9.13.1 概要.412
9.13.2 规格.412
9.13.3 设定.413
9.13.4 碰撞保护设置画面413
9.13.5 程序指令.414
9.13.5.1 COL DETECT ON 指令 / COL DETECT OFF 指令.414
9.13.5.2 COL GUARD ADJUST 指令415
9.13.6 注意事项.416
9.14 负载设定功能 417
9.14.1 概要.417
9.14.2 动作性能画面.417
9.14.3 程序指令.418
9.15 负载估计功能 419
9.15.1 概要.419
9.15.2 操作步骤.419
9.15.3 负载估计的步骤(面向6 轴机器人).419
9.15.4 校正的步骤(面向6 轴机器人).422
9.15.5 其他相关事项.424
9.16 附加轴碰撞保护功能 425
9.16.1 概要.425
9.16.2 注意事项.425
9.16.3 初始设定.425
9.16.4 调节灵敏度.425
9.17 重力补偿功能 426
9.17.1 系统变量.426
9.17.2 动作性能画面.427
9.17.3 调校.428
9.18 密码功能 428
9.18.1 密码功能概要.428
9.18.2 安装用户的密码操作429
9.18.3 使密码功能无效431
9.18.4 程序师用户以及设定者用户的密码操作.431
9.18.5 密码设定文件.434
9.18.5.1 概要 434
9.18.6 密码设定文件的XML 句法435
9.18.7 密码日志.438
9.18.8 对应密码等级的画面限制439
9.18.9 密码自动登入功能442
9.18.10 USB 密码功能.443
9.19 复合运算功能 445
9.20 PMC 监控功能 457
9.21 PMC 编辑功能 459
9.22 操作记录功能 461
9.22.1 概要.461
9.22.2 将被记录的事件463
9.22.3 设定操作记录簿466
9.22.4 操作.467
9.22.5 扩展的报警履历471
9.22.5.1 设定方法 471
9.23 原始路径再继续功能 473
9.24 程序工具箱 477
9.24.1 软极限设定.478
9.25 高性能轨迹恒定控制功能 480
9.25.1 概要.480
9.25.2 直线距离指定功能480
9.25.2.1 直线距离指定功能的使用方法481
9.25.2.2 直线距离指定功能的制约483
9.25.2.3 直线距离指定功能的使用步骤483
9.25.3 拐角范围指定功能484
9.25.3.1 对半径长度的CRy484
9.25.3.2 示教技术 485
9.25.3.3 对动作速度变化的轨迹恒定控制485
9.25.3.4 兼容性和制约 485
9.25.3.5 处理速度高速化功能487
9.25.3.6 制约 489
9.25.4 直线最高速功能489
9.25.4.1 制约 490
9.26 高性能外力追踪功能 490
9.26.1 概要.490
9.26.2 与以往的外力追踪功能的关系.490
9.26.3 操作步骤.491
9.26.4 外力追踪的技能493
9.26.5 直角外力追踪的技能495
9.27 多任务功能 496
9.27.1 概要.496
9.27.2 功能.496
9.27.2.1 创建程序时的注意事项496
9.27.2.2 多任务的启动方法 497
9.27.2.3 母程序与子程序相关的动作497
9.27.2.4 母程序与子程序相关的注意点498
9.27.3 监视.498
9.27.4 暂停、强制结束499
9.27.5 关于循环停止信号(CSTOPI).500
9.28 异常等级设定功能 500
9.28.1 异常等级的概要500
9.28.2 异常等级的详细500
9.29 异常时状态记录功能 503
9.30 多任务用自动异常恢复功能 504
9.30.1 概要.504
9.30.2 自动误差恢复功能505
9.30.3 再启动程序功能505
9.30.4 维修程序功能.505
9.30.5 再启动程序指令506
9.30.6 再启动动作无效指令508
9.30.7 维修程序指令.509
9.30.8 自动异常恢复功能的设定511
9.30.9 再启动程序功能的手动操作画面.520
9.30.10 从示教操作盘执行再启动程序和测试模式.522
9.30.11 变更再启动程序的启动条件.522
9.30.12 其他规格和制约522
9.30.13 警告(请务必仔细阅读) 523
9.31 距离指定信号输出功能 523
9.32 附加轴伺服OFF(局部停止)功能 529
9.32.1 概要.529
9.32.2 规格.529
9.32.3 制约.531
9.32.4 设定.531
9.32.5 注意事项.535
9.32.6 程序例.536
9.33 断续滚焊功能 539
9.33.1 概要.539
9.33.2 规格.539
9.33.2.1 指令 539
9.33.2.2 断续滚焊条件 539
9.33.2.3 断续滚焊处理流程 541
9.33.2.4 其他 542
9.33.3 调整.543
9.33.4 限制.544
9.33.5 附录.545
9.34 双驱动功能 545
9.34.1 双驱动功能的概要545
9.34.2 双驱动功能的设定546
9.35 2 台控制功能 547
9.35.1 功能概要.547
9.35.1.1 规格 548
9.35.1.2 选项 548
9.35.2 操作面板.549
9.35.2.1 电池异常 549
9.35.2.2 示教操作盘有效 549
9.35.2.3 报警 549
9.35.2.4 遥控运转中 549
9.35.2.5 遥控/本地键 549
9.35.2.6 报警解除 550
9.35.2.7 启动 550
9.35.2.8 暂停 550
9.35.2.9 用户1/用户2 550
9.35.2.10 连接/分离键 550
9.35.3 外围设备输入输出信号551
9.35.3.1 信号的变更、追加 551
9.35.3.2 HOLD#1、#2552
9.35.3.3 START#1、#2552
9.35.3.4 RSR 553
9.35.3.5 PNSTROBE#1、#2、PROD_START#1、#2 .553
9.35.3.6 CMDENBL#1、#2553
9.35.3.7 SYSRDY#1、#2553
9.35.3.8 ATPERCH 553
9.35.3.9 PROGRUN#1、#2、PAUSED#1、#2 .553
9.35.3.10 HELD#1、#2554
9.35.3.11 FAULT#1、#2554
9.35.4 机器人输入输出信号554
9.35.5 机器人的切换.555
9.35.6 程序的选择.556
9.35.7 位置示教、位置修正557
9.35.8 程序的启动.558
9.35.8.1 通过示教操作盘启动558
9.35.8.2 通过操作面板启动 558
9.35.8.3 程序的并行执行 558
9.35.8.4 执行中/暂停中的程序选择559
9.35.8.5 通过RSR启动 559
9.35.8.6 外部程序选择(选项)559
9.35.9 程序的停止.560
9.35.9.1 通过示教操作盘停止560
9.35.9.2 通过操作面板停止 560
9.35.9.3 通过专用信号停止(中断)560
9.35.9.4 通过专用信号停止(强制结束)561
9.35.10 处理I/O印刷电路板561
9.35.11 I/O的分配.562
9.35.12 系统变量.563
9.36 机器人分离功能 564
9.36.1 功能概要.564
9.36.1.1 规格 564
9.36.2 操作方法.564
9.36.2.1 操作面板 564
9.36.2.2 SOP564
9.36.3 系统变量$ROBOT_ISOLC .565
9.36.4 对动作指令语句的示教566
9.37 UOP扩展功能 566
9.37.1 功能概要.566
9.37.1.1 规格 566
9.37.1.2 选项 566
9.37.1.3 与2台控制功能(J605)的UOP间的差异567
9.37.2 外围设备I/O 567
9.37.2.1 要使用的UOP组数的设定569
9.37.2.2 信号的变更和追加 569
9.37.2.3 PMC 571
9.37.2.4 HOLD#1~#N572
9.37.2.5 CSTOPI#1~#N572
9.37.2.6 START#1~#N572
9.37.2.7 RSR 573
9.37.2.8 PNSTROBE#1~#N、PROD_START#1~#N .573
9.37.2.9 CMDENBL#1~#N573
9.37.2.10 SYSRDY#1~#N573
9.37.2.11 PROGRUN#1~#N、PAUSED#1~#N .574
9.37.2.12 HELD#1~#N574
9.37.2.13 FAULT#1~#N574
9.37.2.14 ATPERCH 574
9.37.3 程序的选择.574
9.37.3.1 UOP组作为对象的动作群组的设定575
9.37.3.2 执行中/暂停中的程序选择576
9.37.3.3 动作群组切换时的编辑画面显示577
9.37.4 程序的启动.577
9.37.4.1 通过RSR启动 577
9.37.4.2 通过PNS启动 578
9.37.5 程序的停止.578
9.37.5.1 通过专用信号停止(中断)578
9.37.5.2 通过专用信号停止(强制结束)578
9.37.5.3 其他 578
9.37.6 系统变量.578
9.38 错误代码输出功能 580
9.38.1 功能概要.580
9.38.2 规格.580
9.38.2.1 报警的种类 580
9.38.2.2 输入输出信号 581
9.38.3 报警代码的含义582
9.38.3.1 报警的等级 582
9.38.3.2 报警ID(报警的种类).583
9.38.3.3 报警号码 584
9.39 数据监视功能 584
9.39.1 数据监视器的设定586
9.39.2 数据监视器条件591
9.39.3 程序.594
9.39.4 数据监视器图.594
9.40 制动器诊断功能 595
9.40.1 功能概要.595
9.40.2 进行制动器诊断前的事前设定.595
9.40.3 制动器诊断开始596
9.40.4 制动器诊断结果597
9.40.5 限制.597
9.40.6 注意事项.597
9.41 操作面板创建功能 598
9.41.1 概要.598
9.41.2 软件的说明.598
9.41.3 硬件的说明.598
9.41.4 设定方法.598
9.41.4.1 设定的概略 598
9.41.4.2 可追加的iPendant 控制600
9.41.4.3 Fast Label 的设定 601
9.41.4.4 Fast Lamp 的设定 603
9.41.4.5 Fast Switch 的设定 605
9.41.4.6 Button Change 控制的追加.605
9.41.4.7 Command Button 控制的追加609
9.41.4.8 EditBox 控制的追加609
9.41.4.9 Label 控制的追加 610
9.41.4.10 Toggle Button 控制的追加611
9.41.4.11 Toggle Lamp 控制的追加.612
9.41.4.12 面板的修改 614
9.41.4.13 控制的修改 615
9.41.4.14 控制的删除 616
9.41.4.15 控制的移动及复制 617
9.41.4.16 页面的修改 618
9.41.4.17 面板的重新创建 619
9.41.5 从面板启动KAREL 程序.620
9.41.5.1 创建KAREL 程序时的注意事项.620
9.41.5.2 启动按钮的创建 620
9.41.6 使用方法.621
9.41.6.1 面板的显示 621
9.41.6.2 保存/加载 622
9.42 扩展对称移转(镜像位移)功能 623
9.42.1 平行对称移转.624
9.42.2 旋转对称移转.626
9.42.3 使用了现有坐标系和对称面的姿势控制对称移转.627
9.42.4 带有附加轴的对称移转628
9.43 关于KAREL 活用支援功能 636
9.43.1 功能概要.636
9.43.2 关于KAREL 程序设定画面.636
9.43.2.1 KAREL 设定画面的启动636
9.43.2.2 KAREL 程序的登录方法637
9.43.2.3 执行方法 638
9.43.2.4 强制结束方法 639
9.43.2.5 启动方法的设定 641
9.43.2.6 关于细节画面 642
9.43.2.7 细节画面的注意事项以及限制事项644
9.43.2.8 关于再启动 644
9.43.3 自定义菜单.645
9.43.3.1 自定义菜单的启动 645
9.43.3.2 自定义菜单的设定 646
9.43.3.3 设定内容的删除 648
9.44 KAREL 程序执行履历记录功能 650
9.44.1 功能概要.650
9.44.2 硬件及软件.650
9.44.2.1 硬件及软件要件 650
9.44.2.2 硬件 650
9.44.2.3 软件 651
9.44.2.4 性能 651
9.44.3 设定及操作.651
9.44.3.1 KAREL 程序执行履历记录功能的设定651
9.44.3.2 输出方法的选择画面651
9.44.3.3 任务选择画面 652
9.44.3.4 记录的停止画面 654
9.44.3.5 选择中任务一览画面655
9.44.3.6 事件等级的选择画面655
9.44.3.7 事件选择 657
9.44.3.8 全部事件记录的有效化或无效化658
9.44.4 事件的记录.659
9.44.4.1 事件的设定 659
9.44.4.2 将事件记录到ASCII 文件中660
9.44.4.3 ASCII 文件:一般的事件信息.660
9.44.4.4 ASCII 文件:事件固有的信息.661
9.44.5 附录.664
9.44.5.1 概要 664
9.44.5.2 KAREL 程序例 664
9.44.5.3 TP 程序例 665
9.44.5.4 ASCII 文件示例 665
9.45 扭矩极限功能 666
9.45.1 概要.666
9.45.2 扭矩极限功能的使用方法667
9.45.3 扭矩极限功能的多个轴个别设定功能的使用方法.668
9.45.3.1 程序的创建方法 668
9.45.3.2 扭矩极限功能的多个轴个别设定功能的报警668
9.45.4 限制事项.669
9.45.5 注意事项.669
9.46 机器人速度输出功能 669
9.46.1 概要.669
9.46.2 制约.670
9.46.3 设定.670
9.46.4 示教.672
10 叠栈功能 674
10.1 叠栈功能 674
10.2 叠栈指令 676
10.3 示教叠栈 677
10.3.1 选择叠栈指令.678
10.3.2 输入初期资料.679
10.3.3 示教堆上式样.684
10.3.4 设定经路式样条件690
10.3.5 示教经路式样.692
10.3.6 叠栈示教时的注意事项695
10.4 执行叠栈 695
10.4.1 栈板暂存器.696
10.4.2 控制基于栈板暂存器的叠栈.698
10.5 修改叠栈 698
10.6 带有附加轴的叠栈 700
10.7 叠栈自由示教 700
11 FANUC i Pendant 703
11.1 概要 703
11.2 外观和操作方法 704
11.2.1 外观和开关.704
11.2.2 键控开关.705
11.2.3 触控板.706
11.2.4 状态窗口.706
11.2.5 画面的分割方法707
11.2.6 操作对象画面的移动方法709
11.2.7 浏览器画面.709
11.2.8 画面选择以及菜单编辑画面的画面菜单.712
11.2.9 状态辅助窗口.713
11.2.9.1 现在位置显示 713
11.2.9.2 操作面板状态显示 714
11.2.9.3 安全信号状态显示 714
11.2.10 根据每一异常重要程度的彩色显示.714
11.2.11 背光灯的自动消失715
11.2.12 操作上的限制事项716
11.2.13 USB 端口(软件选项、带有USB 功能的新型iPendant 专用) .716
11.2.14 7DA5 系列或更新版上的操作性改良716
11.2.14.1 图标菜单 717
11.2.14.2 图标编辑器 721
11.2.14.3 光标移动 724
11.2.14.4 调用程序指令的输入726
11.2.14.5 宏指令的输入 726
11.2.14.6 编辑行的显示 727
11.2.14.7 调用目的地程序的显示727
11.2.14.8 宽画面 728
11.2.14.9 画面最大化 728
11.3 iPendant 设定 730
11.4 软体面板 737
11.4.1 概要.737
11.4.2 基本操作.738
11.4.3 使用者认定功能的设定740
11.4.4 面板的设定.741
11.4.4.1 面板的设定画面 741
11.4.4.2 设定项目的选择 743
11.4.4.3 项目的设定 744
11.4.4.4 面板有效条件的设定746
11.4.4.5 设定的结束 746
11.4.4.6 设定内容的保存和读出747
11.4.4.7 暂存器面板 748
11.4.5 限制事项750
12 伺服换刀功能 751
12.1 概要 751
12.1.1 功能的特点.751
12.1.2 基本规格.751
12.1.3 限制事项.751
12.1.4 系统的配置.753
12.1.5 导入的概要.754
12.2 初期设定 755
12.3 刀具暂时连结 755
12.4 换刀设定 757
12.5 设定参考点 761
12.5.1 无电池类型的情形761
12.5.2 电池安装类型的情形761
12.6 换刀指令 761
12.6.1 TOOL DETACH(刀具分离)指令.762
12.6.2 TOOL ATTACH(刀具连结)指令.762
12.6.3 程序例.762
12.6.4 前进执行(FWD) .762
12.6.5 后退执行(BWD) .763
12.7 换刀 顺序 764
12.8 换刀 状态显示 764
12.9 程序的示教 765
12.9.1 示教时的注意事项765
12.9.2 程序例.766
12.10 换刀专用画面构成表 766
12.11 换刀初期设定方法 767
12.11.1 伺服刀具轴的运动参数设定.767
12.11.2 伺服刀具轴和刀具号码的分配.767
12.11.3 系统变量的设定768
12.12 换刀参考点设定方法(无电池类型) 768
12.12.1 位置校准类型3、4 的参考点设定 768
12.12.2 位置校准类型5、6的参考点设定 770
12.12.3 设定简易调校参考点 771
12.13 故障排除 772
12.13.1 尚未连结刀具时执行了连结指令时 772
12.13.2 位置校准动作中停下机器人时 773
12.13.3 位置校准动作失败时 773
12.13.4 连结了与连结指令中所指定的刀具不同的刀具时 773
12.13.5 错误地(不用分离指令)分离所连结的刀具时 774
12.13.6 已被分离的刀具的轴移动时 774
12.13.7 电池的电压下降时 774
12.13.8 刀具分离期间电池耗尽时 775
附录
A 画面和程序指令 779
A.1 菜单一览 779
A.2 画面的种类 784
A.3 程序指令一览 804
A.4 程序指令 807
A.4.1 动作指令 807
A.4.2 动作附加指令 808
A.4.3 暂存器指令和I/O 指令 809
A.4.4 条件转移指令 810
A.4.5 等待指令 811
A.4.6 无条件转移指令 812
A.4.7 程序控制指令 812
A.4.8 其他指令 812
A.4.9 跳过和位置补偿指令 813
A.4.10 坐标系设定指令 814
A.4.11 宏指令 814
A.4.12 多轴控制指令 815
A.4.13 位置暂存器先执行指令 815
A.4.14 外力追踪指令 815
A.4.15 状态监视指令 815
A.4.16 动作群组指令 816
A.4.17 叠栈指令.816
B 特殊操作 817
B.1 开机方式 817
B.1.1 开机方式的种类817
B.1.2 初始开机.818
B.1.3 控制开机.819
B.1.4 冷开机.820
B.1.5 热开机.821
B.2 校正 822
B.2.1 夹具位置校正 823
B.2.2 零位校正(对合标记校正) 824
B.2.3 快速校正 826
B.2.4 单轴校正 828
B.2.5 输入校正数据 830
B.3 软件版本数 831
B.4 机器人各轴状态 833
B.5 诊断画面 838
B.5.1 概要.838
B.5.2 有关减速机诊断838
B.5.3 操作步骤 838
B.5.4 各条目 839
B.6 全局坐标系原点 842
B.7 设定I/O 模块 842
B.8 有关FSSB 路径设定 846
B.8.1 FSSB路径的定义846
B.8.2 设定1(FSSB 路径) 847
B.8.3 设定2(FSSB 第1 路径的总轴数)848
B.8.4 设定3(硬件开始轴号码)848
B.8.5 设定例.849
B.8.5.1 设定例1 849
B.8.5.2 设定例2 849
B.8.5.3 设定例3 850
B.9 定位器启动步骤 850
B.10 附加轴启动步骤 857
B.11 独立附加轴(Independent Axes)启动步骤 863
C 系统参数 868
C.1 系统参数表的查阅方法 868
C.2 系统参数 869
D 调查数据获取步骤(R-30iA 用) 885
D.1 异常时状态记录的保存方法 887
D.2 调查记录的保存方法 888
D.3 全部备份的保存方法 889
D.4 图像备份的执行方法 891
E 术语表 893
转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1029.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
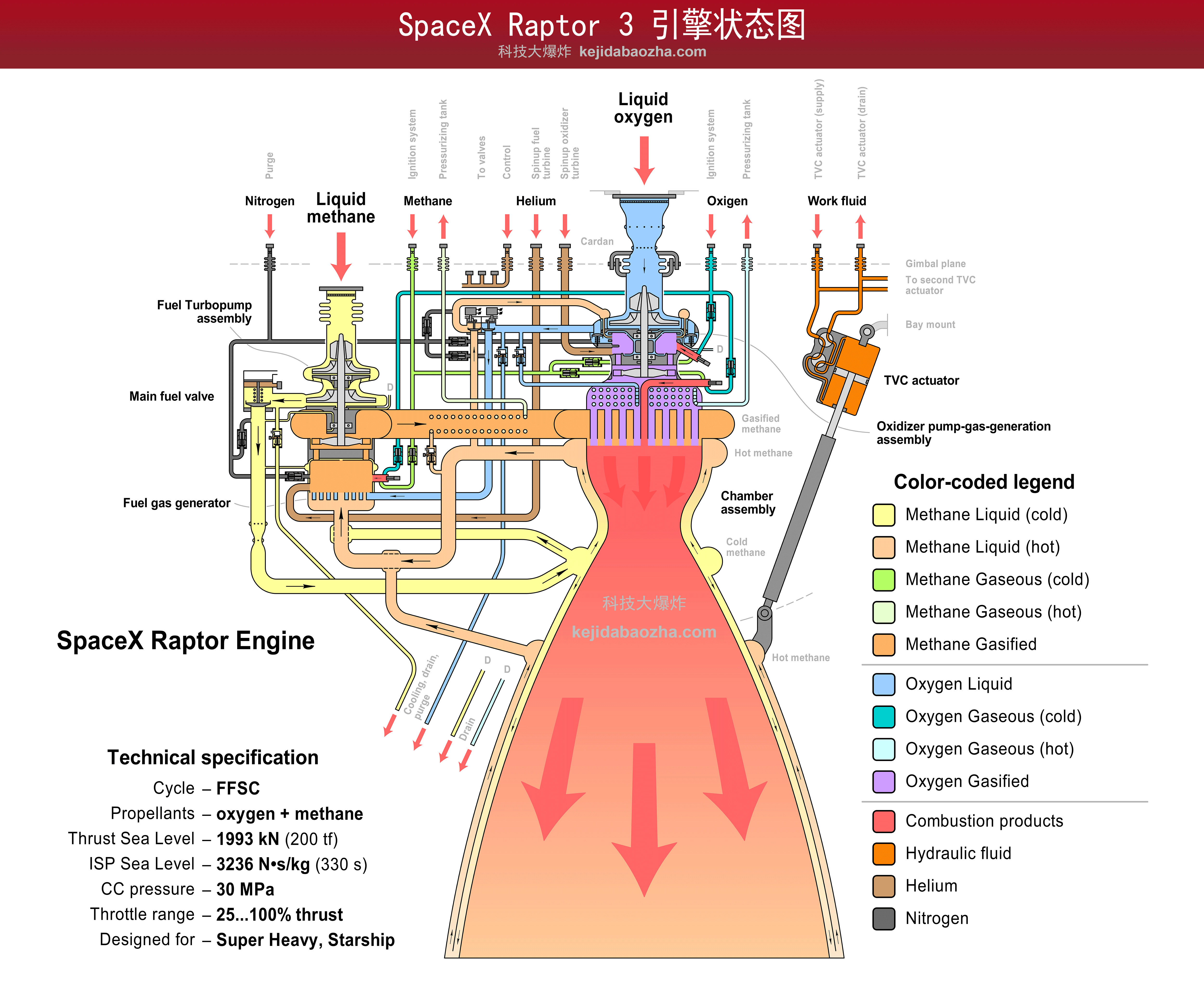 SpaceX Raptor 3 引擎工作原理图,火箭发动机零部件组成及中英文对照,一张图胜过千言万语
SpaceX Raptor 3 引擎工作原理图,火箭发动机零部件组成及中英文对照,一张图胜过千言万语 低温阀门 加长阀盖 (Extended Bonnet)是什么意思?
低温阀门 加长阀盖 (Extended Bonnet)是什么意思?- 日本标准居然是大学老师编写,而我们大多是生产厂家编写,大学老师和生产厂家哪个更厉害?
 针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理
针型阀 全称针型截止阀 Needle Valve 内部结构和运行原理- 现实世界毫无存在感,互联网上也毫无痕迹,我们对这个世界的贡献几乎为零
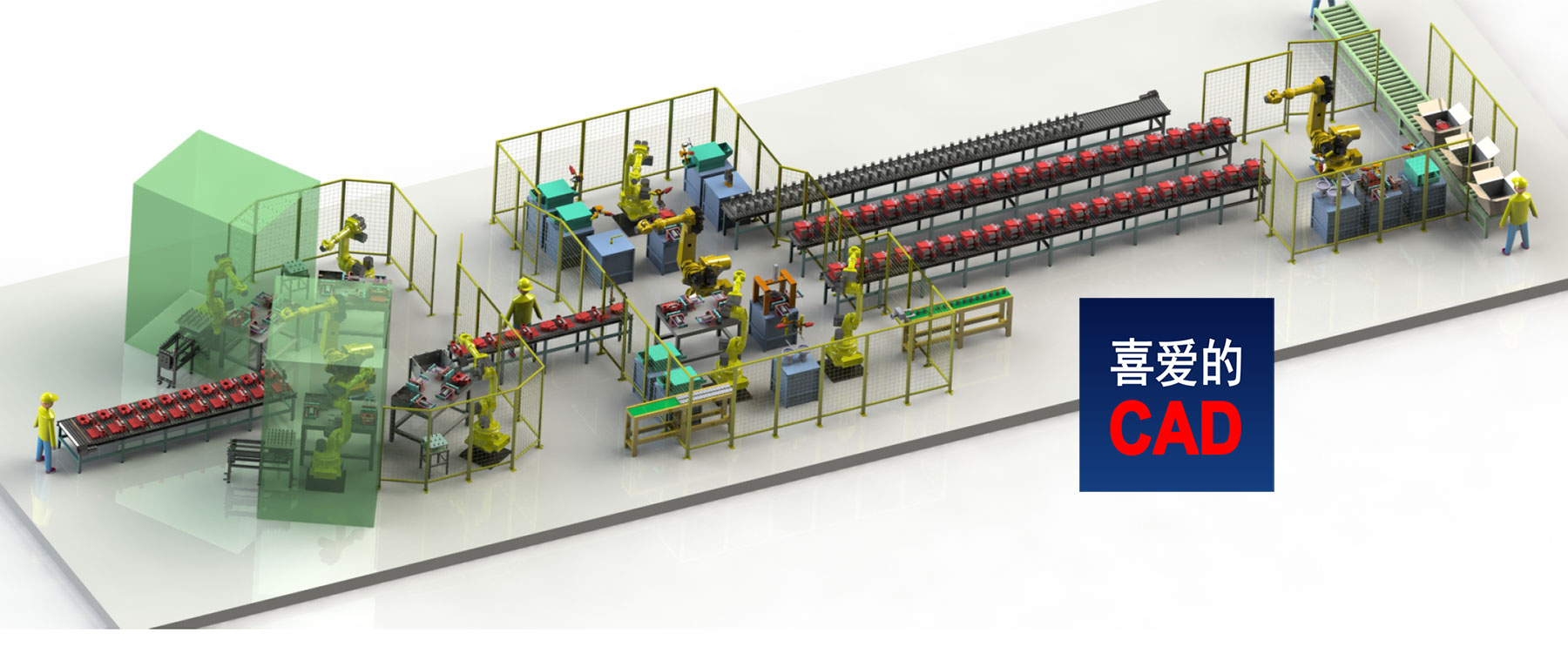
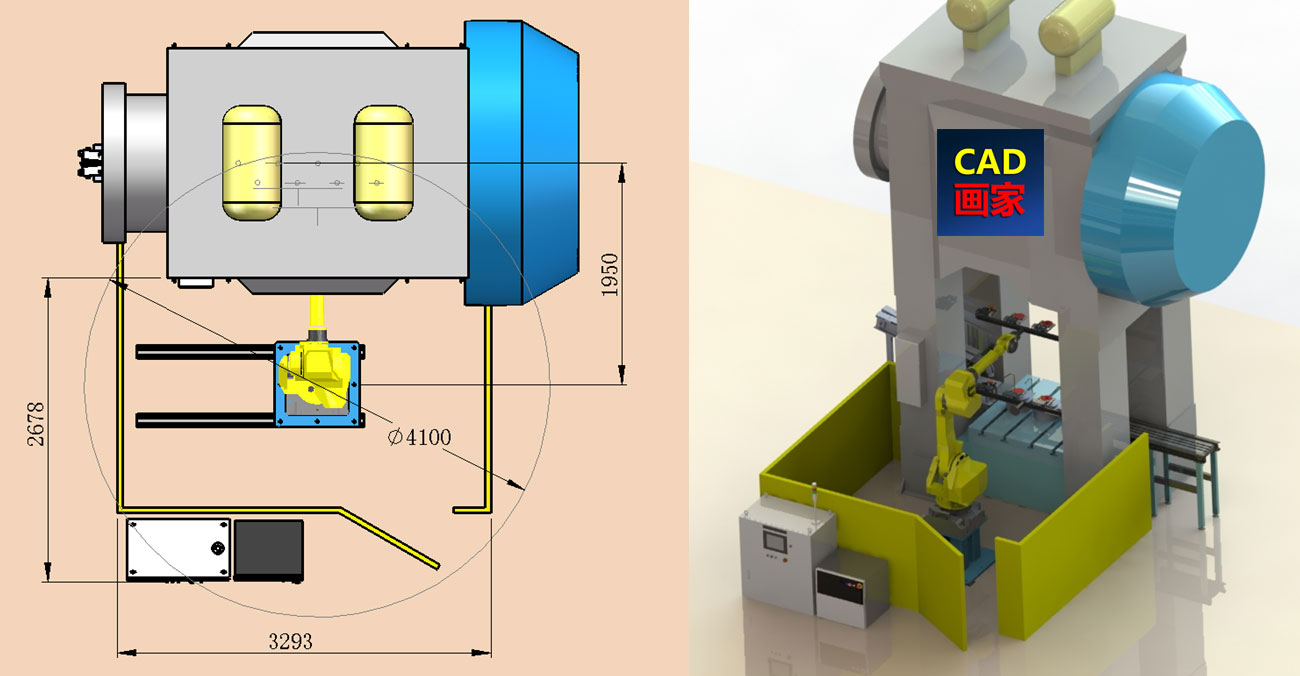 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化- 在外协厂遇到一位懂技术的老师傅,惺惺相惜,相聊甚欢
- 方案大师:2.4.3 机器人、机械手、地轨、手爪等结构和原理详述
- 汽车发动机是如何启动的?看完内部构造之后,让我对机械钦佩不已
- 泵的扬程和压力的换算关系公式 附泵的性能曲线图
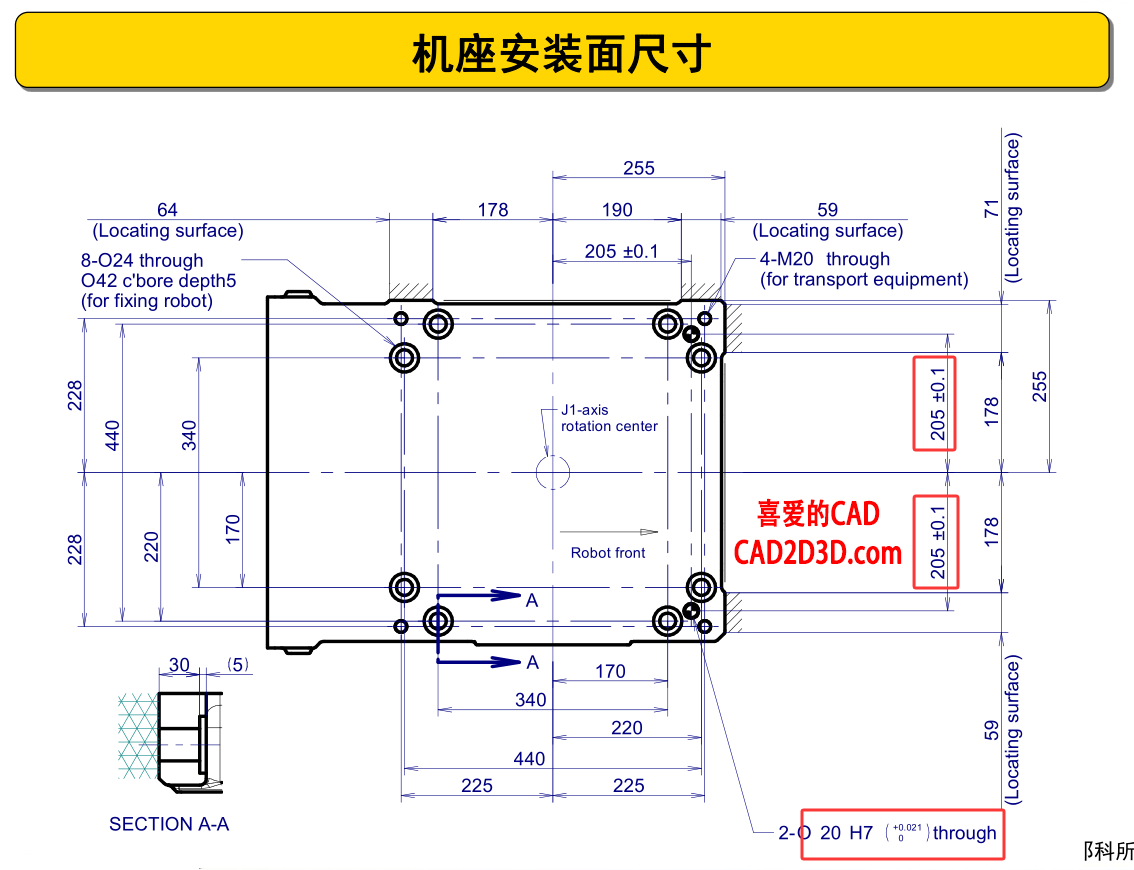 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
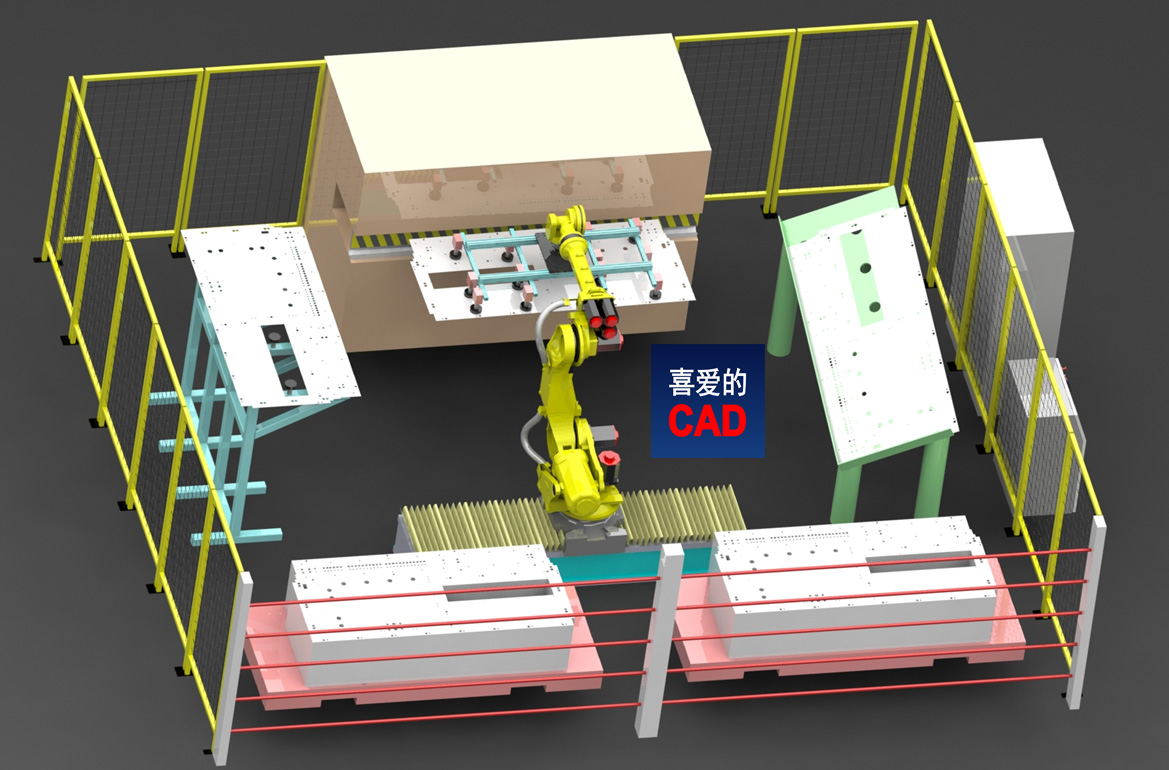 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
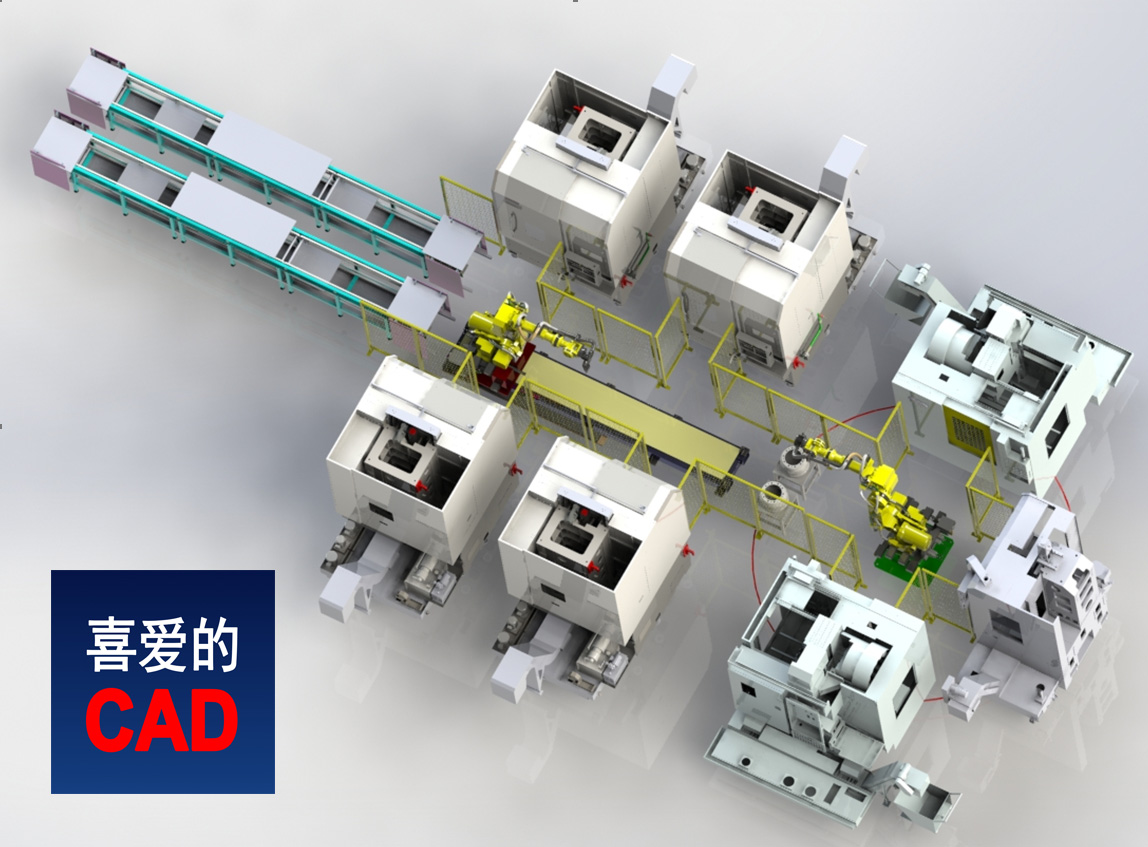 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载