
与
自动化 相关商品:
查看所有与
自动化 相关商品 >>
 1.4万套solidworks非标自动化设备3D图纸机械设计SW建模三维模型
1.4万套solidworks非标自动化设备3D图纸机械设计SW建模三维模型  python自动化人工智能高效便捷办公 excel全套数据处理视频教程
python自动化人工智能高效便捷办公 excel全套数据处理视频教程  脚本开发定制定做全自动化点击软件游戏网页办公挂机按键精灵制作
脚本开发定制定做全自动化点击软件游戏网页办公挂机按键精灵制作 没有绝对的准确,取放件时干涉必然存在,如何解决?
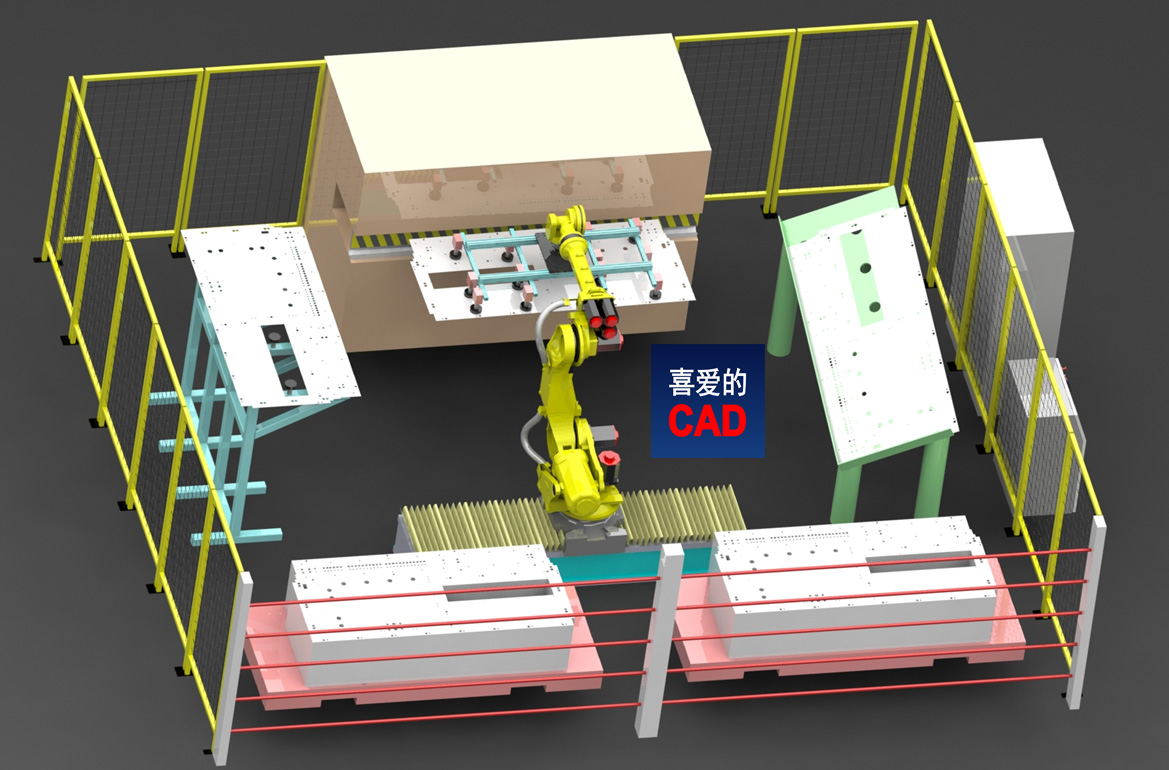
工业机器人手爪在取放工件时,由于工件位置偏差,必然导致机器人承受额外附加外力,如果工件偏移量较大,手爪强行取件的话,相当于机器人发生碰撞。
为了解决上述问题,工业机器人开发了软浮动功能,也就是机器人受外力时,可以顺应外力,偏离程序指定点。
软浮动功能主要是解决如何取放件。
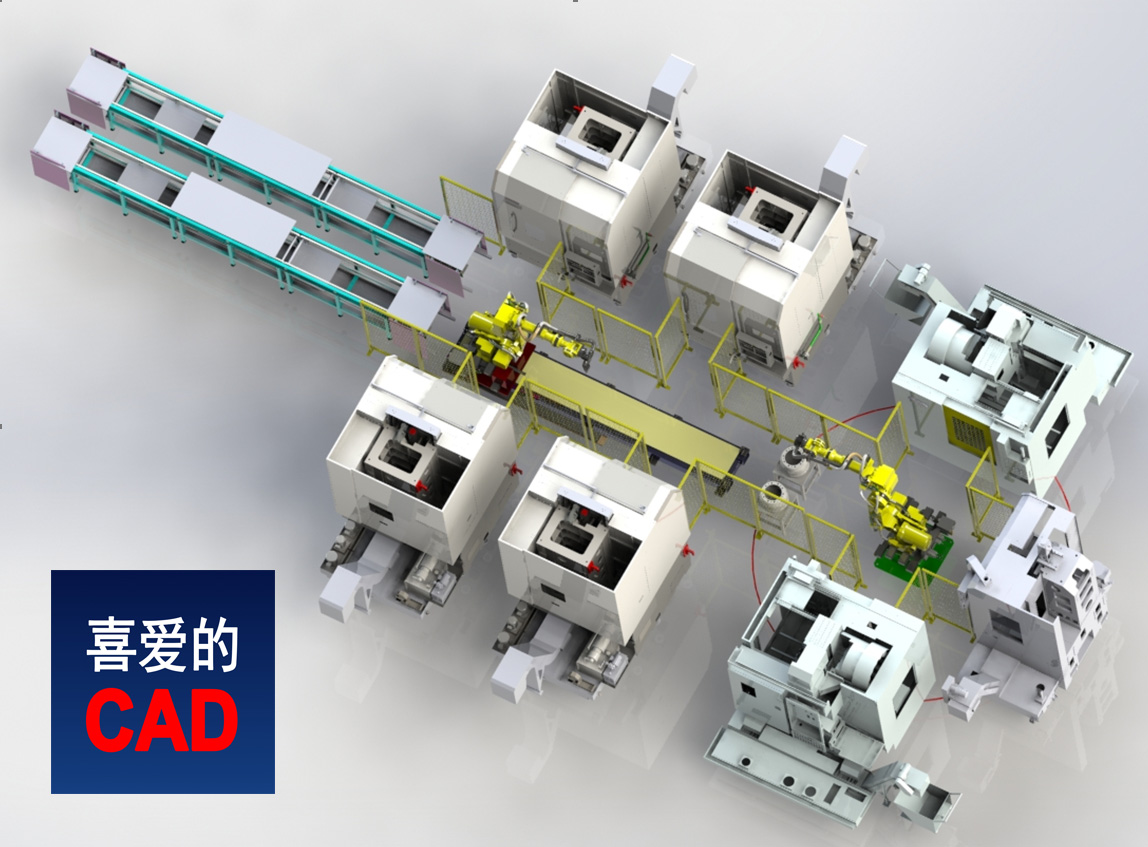
机器人默认情况下朝着示教的目标移动,在将工件安装在机床上进行作业的情况下,由于工件的精度偏差,与机床之间的相对位置会出现偏移,由此而可能导致工件与机床相互干涉,在将精度上有偏差的工件安装到机床上时,软浮动功能将十分有效。
此外,在与液压引起的挤出同步地取出工件而同步速度不稳定的情形,以及粗削工件等希望准确地进行机器人无法抓取的工件搬运的情况下,软浮动功能也同样十分有效。
但实际项目执行过程中,现场调试工程师很少使用软浮动,都是靠手爪变形来适应工件位置偏差,俗话说的好,黑猫白猫抓到老鼠就是好猫,不管你用什么样的方法,你能解决实际问题就行了。
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站官方微信公众号 科技从0到1,私信回复
暗号1343
即可自动获取。
手机扫描下方二维码快速关注公众号 科技从0到1 ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post- 1343 .html
留言说明:
如对本文有疑问,可关注微信公众号 科技从0到1 直接留言即可。手机扫描下方二维码直接关注 科技从0到1。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
正在加载你可能感兴趣的文章...
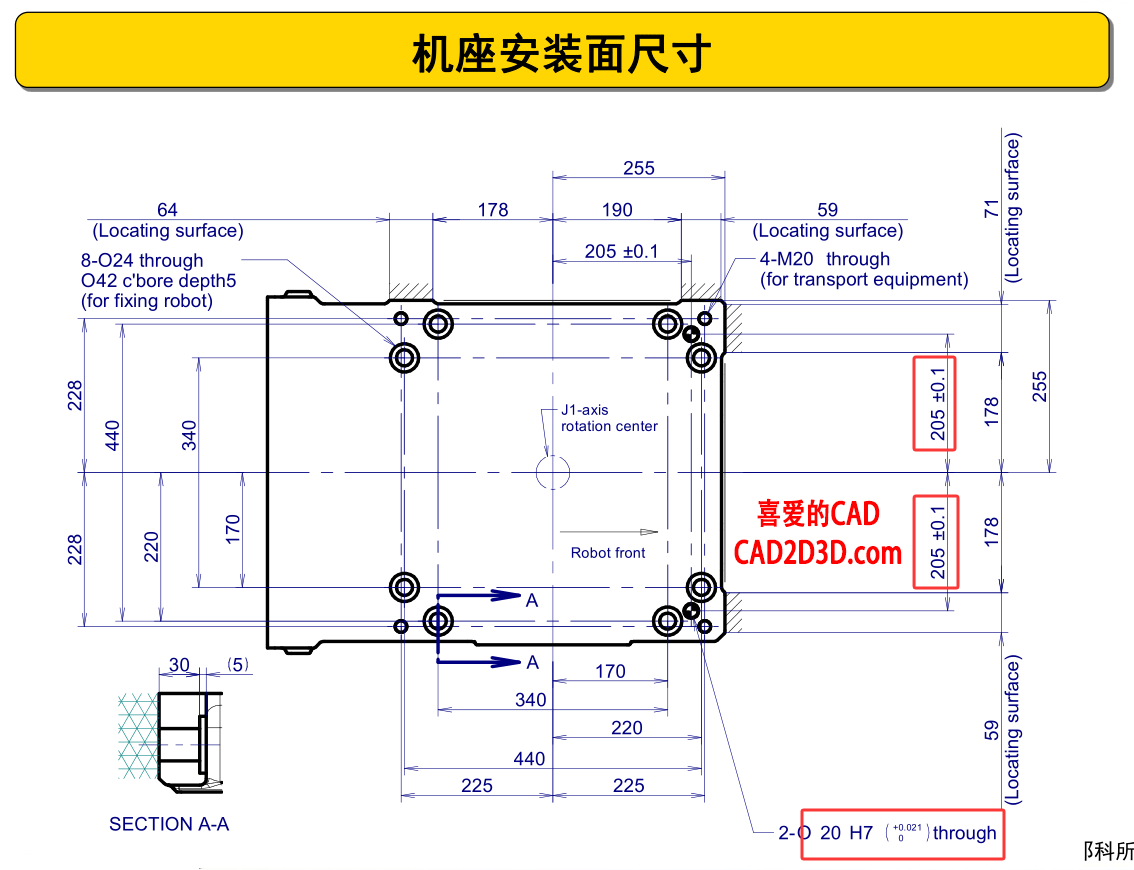 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
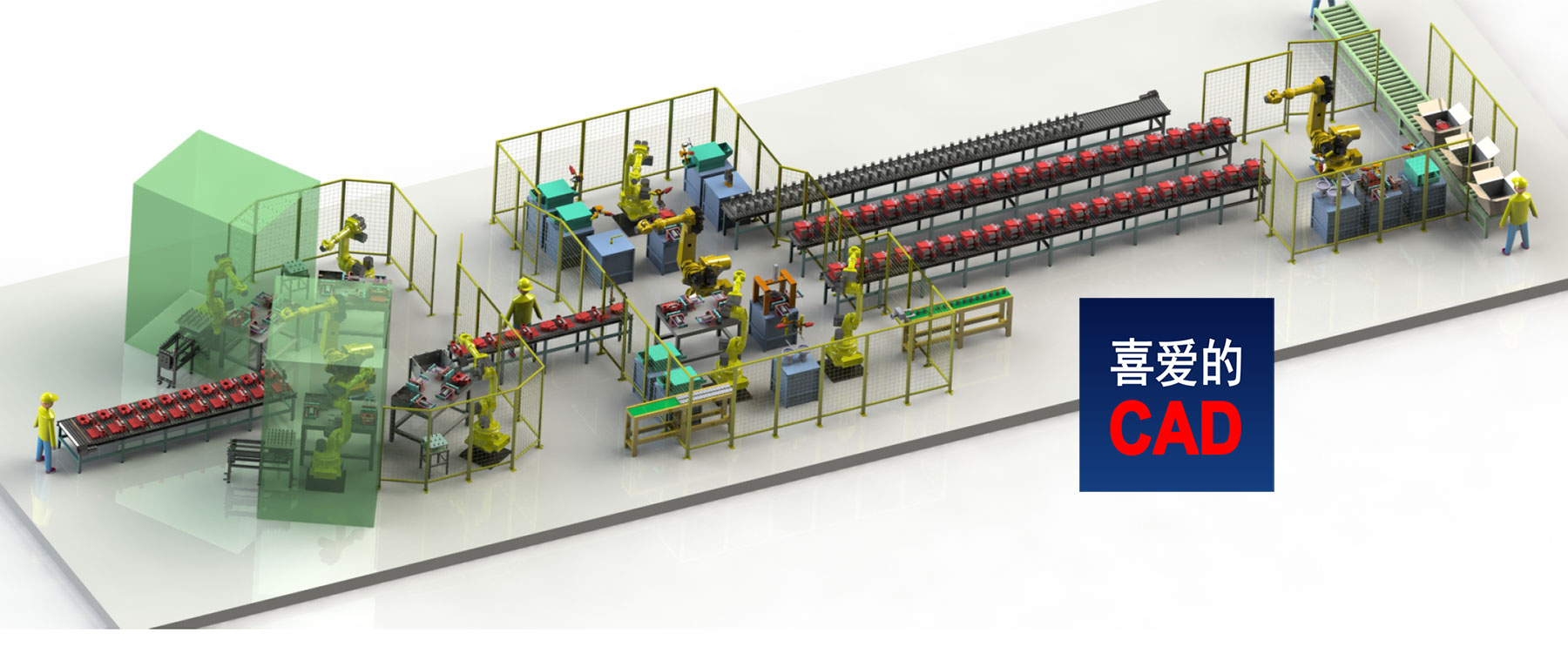 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载