
 SW SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2
SW SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2  Sw SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2
Sw SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2  SW SolidWorks软件远程安装2026/2025/2024/2023/2022/2021/2
SW SolidWorks软件远程安装2026/2025/2024/2023/2022/2021/2 1. 深度图
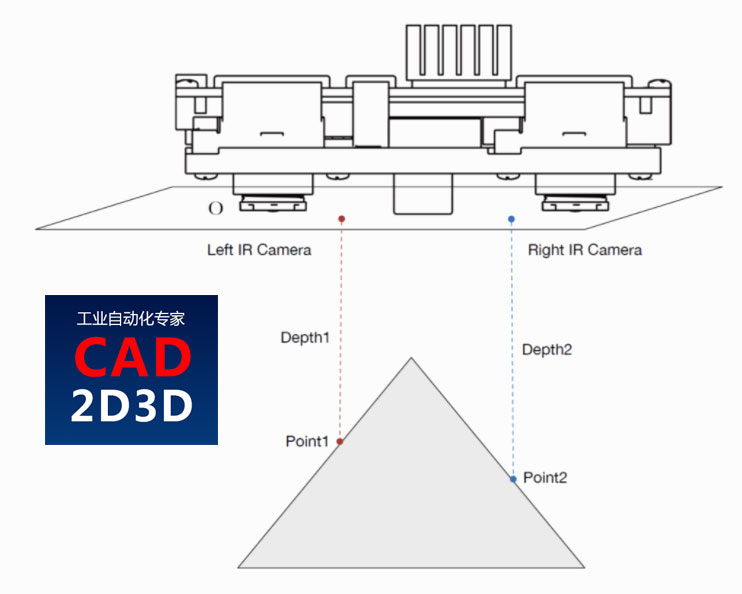
深度图中的单个像素值是空间中物体的某个点到垂直于左红外镜头光轴并通过镜头光心(深度相机光学零点)平面的垂直距离。
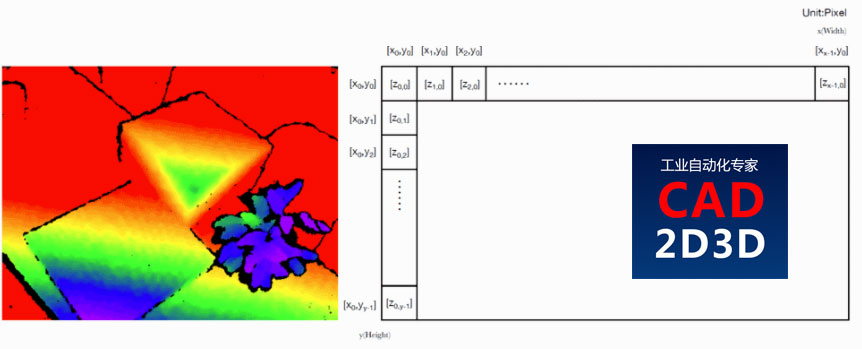
深度图是深度相机视野内所有点的深度数据构成的矩阵。深度图是一个16bit位深的单通道矩阵,单位为毫米。没有深度信息的点值为0。为直观的体现不同距离数值,在SDK提供的sample程序中,输出的深度图均被映射到了RGB色彩空间,所以显示出来的结果为RGB三通道8bit位深的位图,深度数据无外参,无畸变,只能提供用于转换点云数据的内参。
深度图定义
深度图数据格式
2. 点云图
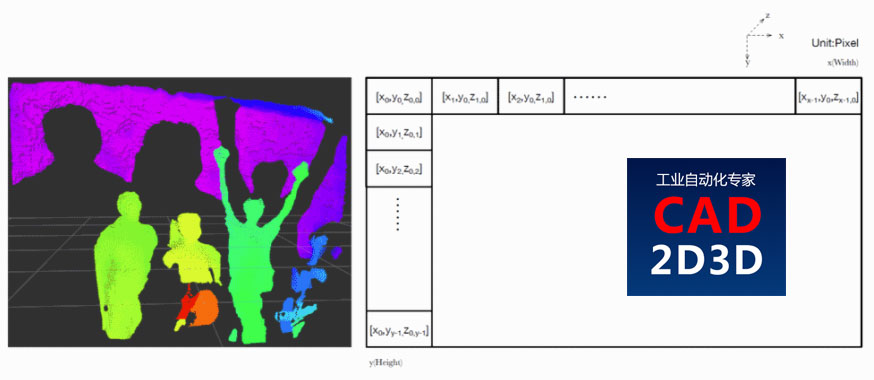
通过深度相机得到的物体外观表面的点数据集合是点云。使用深度相机得到的点云信息为三维坐标(X,Y,Z)。点云图是深度相机捕捉到的所有点的点云信息构成的数据矩阵。每点为3个float类型x,y,z值。没有三维空间信息的点为(0,0,0)。
点云图数据格式
3. IR图
IR图像为红外图像传感器输出的红外图像。在输出深度图的时候,部分型号的相机输出的IR图像是被系统处理过的图像,如果需要看原始的IR图像,需要关闭深度图像输出。关闭深度图像输出后,激光投射器也会自动关闭。如果需要打开激光器,需主动调用SDK API关闭激光器的自动控制功能,并且设置激光机强度,才能看到正常的红外图像传感器图像。IR图像分为左IR图和右IR图,二者均包含内参和畸变参数,但是因为左IR和深度图是同一个空间坐标系,所以左IR图像无外参。
4. RGB图像
不同型号的Percipio相机会输出不同数据类型的RGB图像。其中一类RGB图像传感器含有硬件ISP模块,输出机为正常的YUV422/JPG图像,经OPENCV处理即可显示为RGB图像。另一类RGB图像传感器没有硬件ISP模块,输出的raw bayer图像数据显示为图像时,画面颜色”偏绿”,经过SDK的软件ISP处理(如白平衡),才可以显示为正常色彩空间的RGB图像; 没有硬件ISP模块的RGB图像传感器可以确保输出的图像数据与IR图像数据同步。RGB图像传感器组件提供了内参,外参数,畸变参数。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1518.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 幡然醒悟!联想才是真正的民族企业,因为它没有狼性文化,也没有清理34岁老员工
幡然醒悟!联想才是真正的民族企业,因为它没有狼性文化,也没有清理34岁老员工 皮带输送机参数,负载、速度
皮带输送机参数,负载、速度更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
 发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载