
 2026新款智能机器人儿童AI人工编程早教电动遥控玩具男孩生日礼物
2026新款智能机器人儿童AI人工编程早教电动遥控玩具男孩生日礼物  2026新款ai智能机器猫狗儿童玩具人工编程电动遥控男女孩生日礼物
2026新款ai智能机器猫狗儿童玩具人工编程电动遥控男女孩生日礼物  Cami o1 智行版AI车载智能机器人伴驾精灵电子宠物汽车中控台摆件语音对话机器人陪伴2026新款
Cami o1 智行版AI车载智能机器人伴驾精灵电子宠物汽车中控台摆件语音对话机器人陪伴2026新款 视觉系统也有精度这个参数,这个精度准确来说是指重复精度,视觉重复精度可通过实测统计算出来。其实除了重复精度,还有一个准确度参数,由于视觉会将工件实际位置参数发送个机器人,因此视觉准确度直接影响机器人抓取。
一般运动的设备都是重复精度和定位精度两个参数,比如工业机器人和机床等。工业机器人精度详解可参考 https://www.cad2d3d.com/post-1336.html。
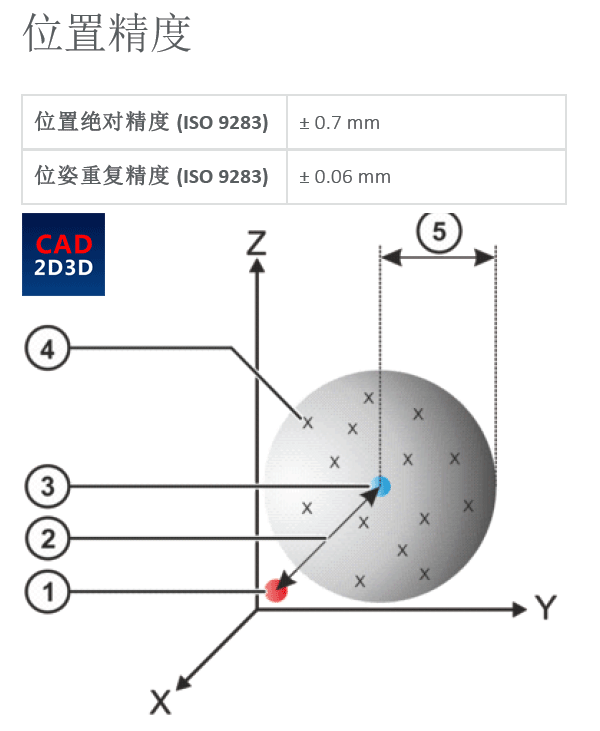
1. 什么是定位精度和重复精度?
定位精度指的是你的数控设备停止时实际到达的位置和你要求到达的位置误差。比如你要求一个轴走 100 mm 结果实际上它走了 100.01 多出来的 0.01 就是定位精度。
重复定位指的是同一个位置两次定位过去产生的误差。比如你要求一个轴走 100 mm,结果第一次实际上他走了 100.01, 重复一次同样的动作 他走了99.99 这之间的误差 0.02 就是重复定位精度。
通常情况重复定位精度比定位精度要高的多。
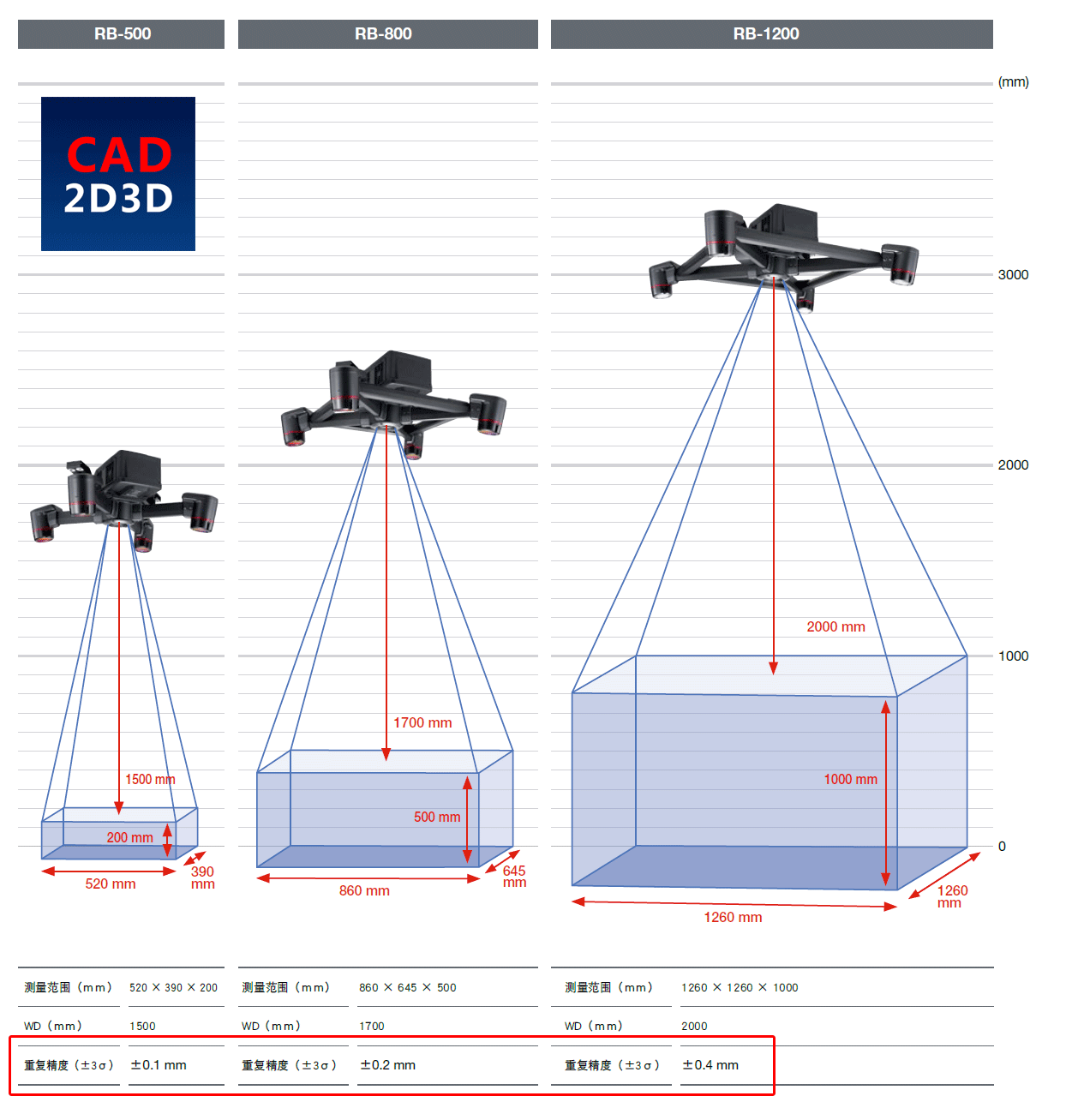
2. 基恩士3D视觉系统参数表
基恩士3D视觉RB-500的重复精度(±3σ)±0.1 mm,RB-8500的重复精度(±3σ)±0.2 mm,RB-1200的重复精度(±3σ)±0.4mm,基恩士特意标注了(±3σ),那么(±3σ)是什么意思呢?
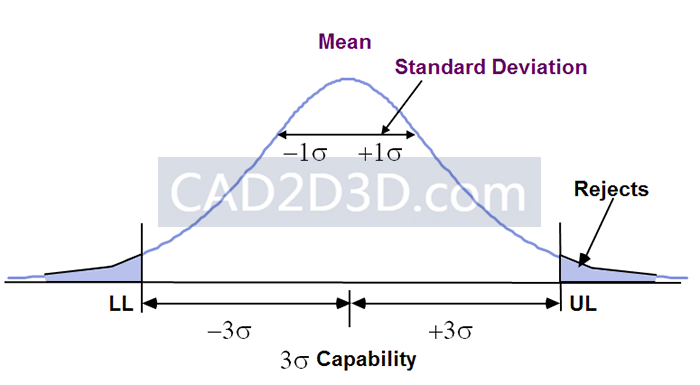
3. 重复精度 ±3σ 是什么意思呢?
基恩士的重复精度中提到±3σ,只要看到σ(标准差),就知道这个是根据实测数据,统计计算出来的。关于标准差和公差设计可参见 https://www.cad2d3d.com/post-1144.html。
比如RB-500的重复精度(±3σ)±0.1 mm,σ(标准差)则是(+0.1-(-0.1))/3,σ=0.067,基恩士的重复精度取的是标准差的3倍,因此基恩士视觉重复精度是留了很大一个安全系数的。
4. 重复精度和定位精度哪个重要?
重复精度和定位精度都很重要,像工业机器人编程有时候是靠示教来记录点位置的,这时候看的就是重复精度,如果点的位置是靠系统指定的话,比如控制系统指定让机器人走到点(X,Y,Z,W,P,R),这时候就要看机器人定位精度了。
如果视觉是用来引导机器人行走的话,视觉精度其实更看重的是定位精度,也就是点在实际环境下的位置数据,这样机器人走的会更准确。
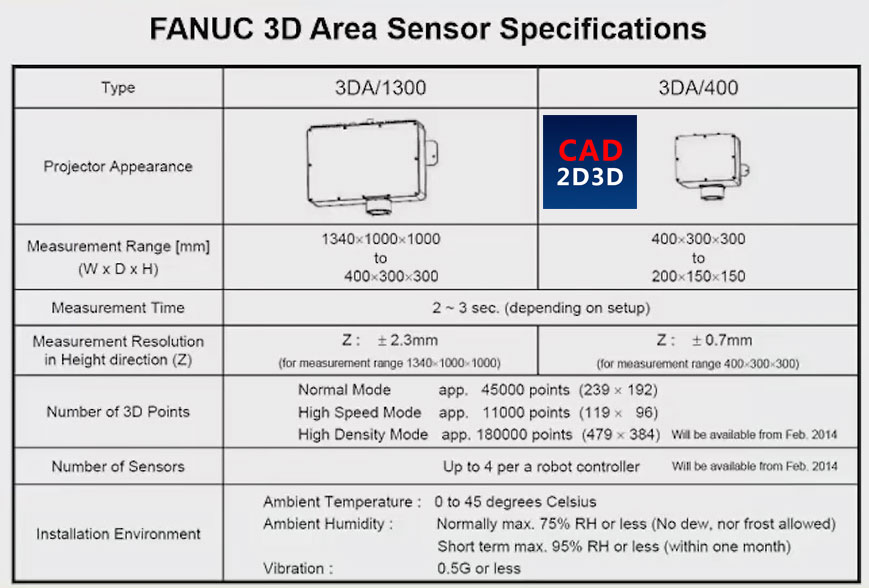
实际上3D视觉点云数据的准确度很低,FANUC 3DA/1300视觉相机Z轴方向的分辨率是±2.3mm,XY方向分辨率更差,具体可参见 https://www.cad2d3d.com/post-1329.html。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1337.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 只做球头轴承,年产值23亿元,为何我们都看不上的产业,日本公司却能坚守110年?
只做球头轴承,年产值23亿元,为何我们都看不上的产业,日本公司却能坚守110年? 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领/长期有效)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领/长期有效) 地价上涨,国内立体库开始爆发,一个汽车壳体立体库,节省千万元
地价上涨,国内立体库开始爆发,一个汽车壳体立体库,节省千万元 标准机器人单元组成要素,机器人装配自动化案例视频
标准机器人单元组成要素,机器人装配自动化案例视频 仿人机器人头部构造,内部组成和实现方式
仿人机器人头部构造,内部组成和实现方式 机器人加3D视觉,实现尺寸测量和瑕疵检测,所有质检岗位将消失
机器人加3D视觉,实现尺寸测量和瑕疵检测,所有质检岗位将消失 浇注现场管道除尘除气管道装置
浇注现场管道除尘除气管道装置更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
 发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载