
 4V210-08气动电磁阀4V110-06气缸换向气阀220V控制阀24v电子阀12V
4V210-08气动电磁阀4V110-06气缸换向气阀220V控制阀24v电子阀12V  亚德客电磁气动阀4V210-08二位五通AC220V线圈换向控制阀组DC24V
亚德客电磁气动阀4V210-08二位五通AC220V线圈换向控制阀组DC24V  电磁水阀2w常闭220铜阀电磁阀24v开关控制阀456分电磁控制阀220v
电磁水阀2w常闭220铜阀电磁阀24v开关控制阀456分电磁控制阀220v 工业视觉类似人的眼睛,工业机器人利用视觉技术,可以实现工件的形状和位置识别,引导机器人准确抓取工件。
正常情况下,机器人运动轨迹是按照预先设定的程序执行的,如果给机器人加上视觉系统,机器人就可以利用视觉识别到的工件位置参数,自动调整点位,从而增加了机器人单元的柔性。
机器人对视觉的需求越来越大,对视觉感兴趣的小伙伴也越来越多,为了让小伙伴更快更好的学习识别,在此将日本发那科FANUC机器人公司的iRVision操作说明书分享给大家,以期达到事半功倍的效果。
发那科机器人(FANUC)视觉(iRVision)操作说明书 下载地址:见页面底部 下载链接
发那科机器人(FANUC)视觉(iRVision)操作说明书主要包含的内容:
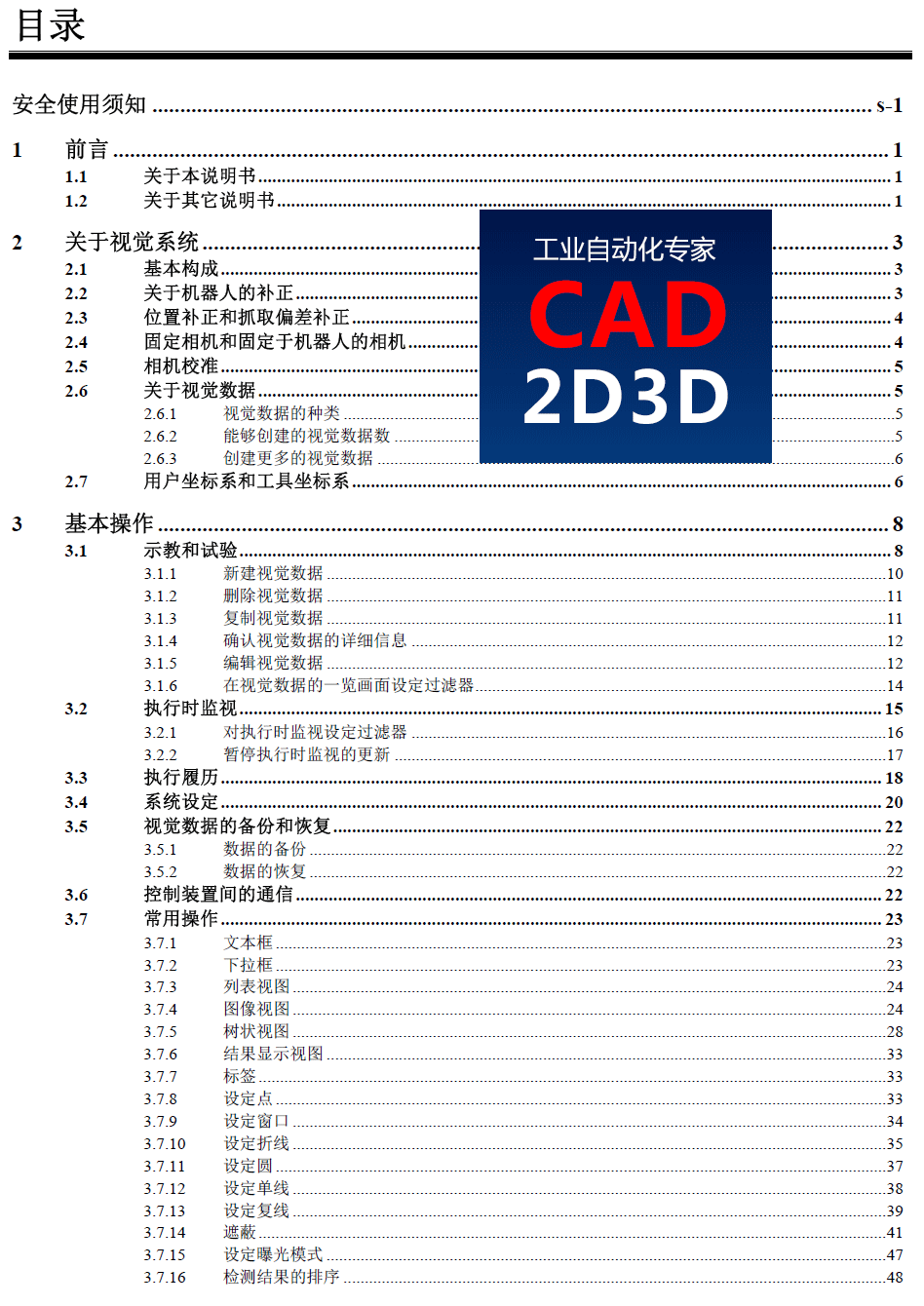
- 第 1 章 关于本说明书的使用方法
- 第 2 章 关于基本构成、一般事项、机器人补正的基础事项
- 第 3 章 关于基本操作
- 第 4 章 关于相机的设定方法
- 第 5 章 关于相机标定
- 第 6 章 关于视觉程序的示教方法
- 第 7 章 关于命令行工具的设定方法
- 第 8 章 关于应用数据的设定方法
- 第 9 章 关于从机器人的程序启动的方法
- 第 10 章 关于iRVision 视觉应用功能
- 第 11 章 关于点阵板夹具
- 第 12 章 关于其它选项
- 附录 A 关于使用电脑的iRVision 的示教方法
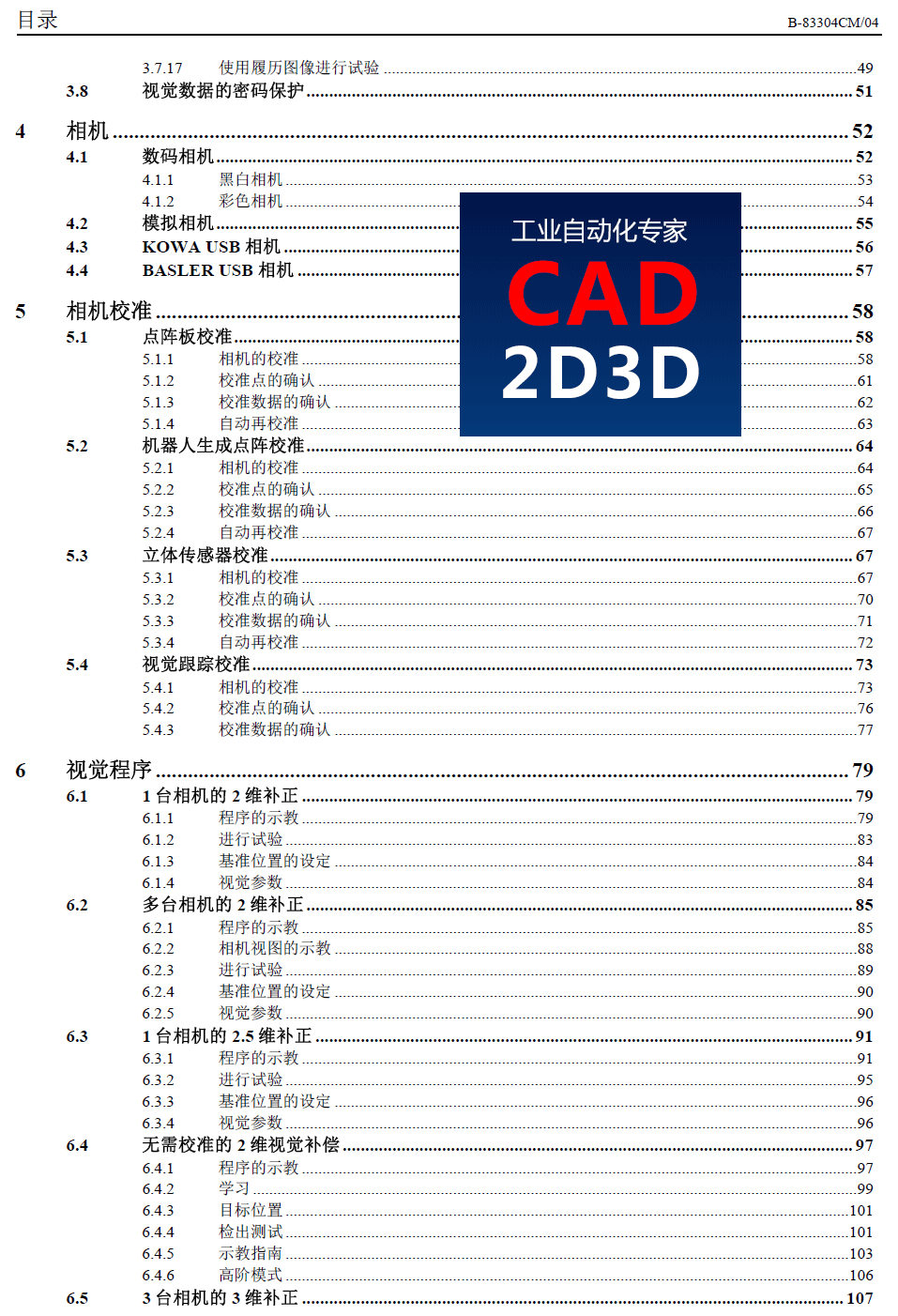
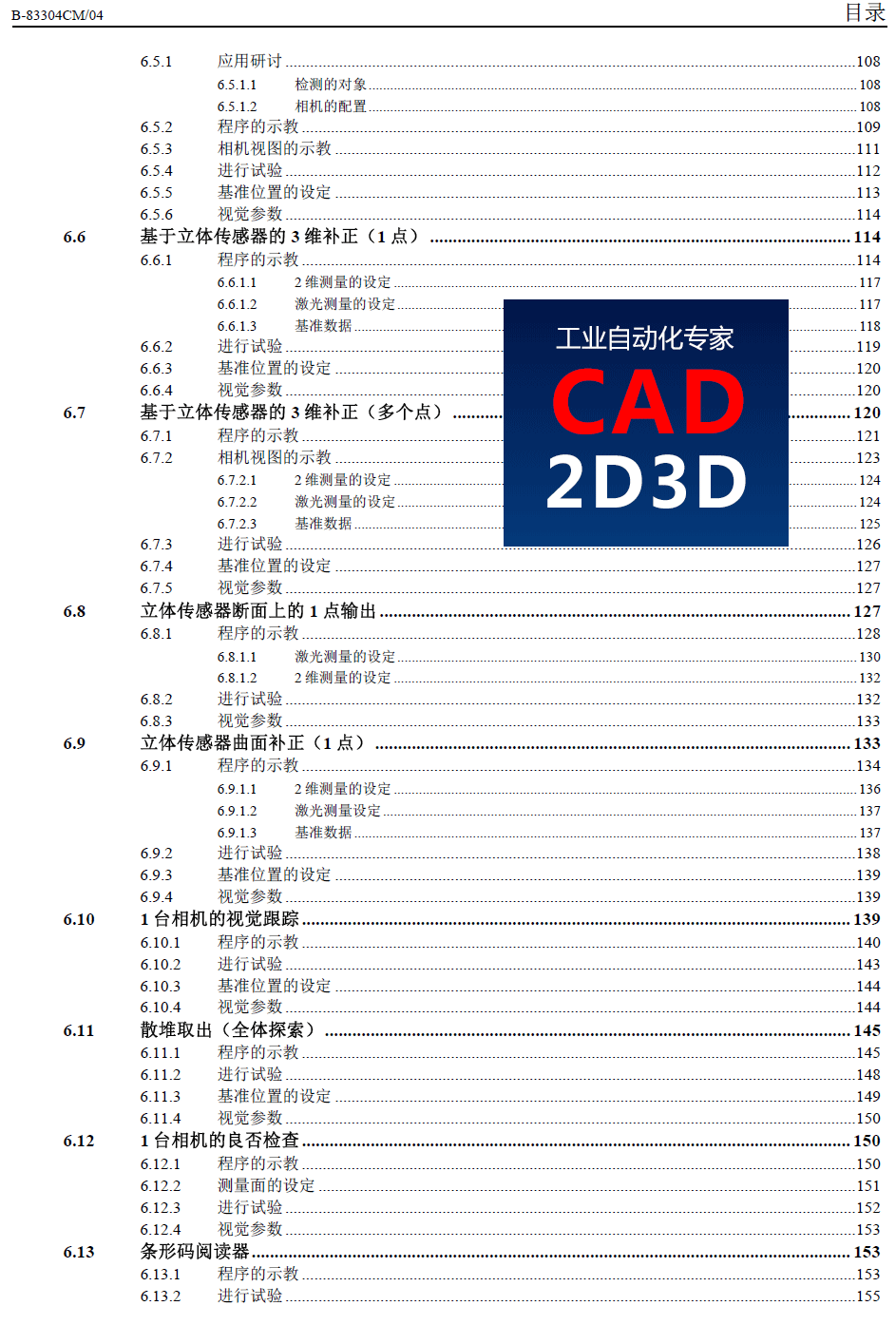
目录详情:

正文预览:
2 关于视觉系统
本章就使用iRVision 的机器人补正的基础事项进行说明。
2.1 基本构成
这里就iRVision 的基本构成进行说明。本说明书中说明的是极为一般情况下的构成。根据应用情况,有时需要专用的构成品。详情请参阅各应用的启动步骤书。
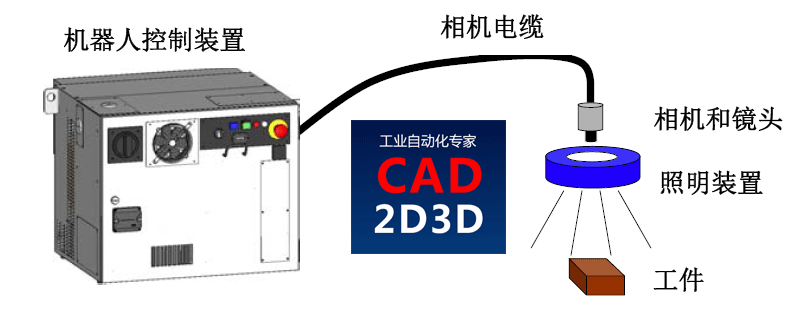
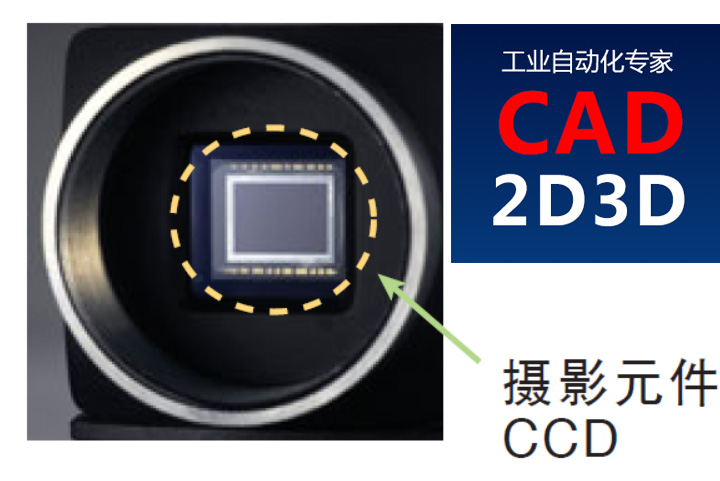
iRVision,典型的由如下设备构成。
- 相机
- 镜头
- 相机电缆
- 照明装置
- 复用器(根据需要选配)
2.2 关于机器人的补正
本公司制造的机器人是示教重放方式的机器人。所谓示教重放,是指预先对机器人的动作内容进行示教,以使机器人按照所示教的内容进行作业的一种动作方式。我们将指定了动作内容的程序叫做机器人程序。将创建机器人程序的动作叫做机器人程序的示教。此外,将执行已示教的机器人程序的动作叫做向前播放。示教重放方式的机器人,对预先已示教的动作无丝毫差错地进行地向前播放。反过来说,它只能够执行预先已示教的动作。换句话说,要以相同的方式对放置在工作台上的工件进行作业,必须每次都把工件放置在相同的位置。iRVision 是为了排除如此制约而做成的视觉传感器。iRVision 使用相机对工件的位置进行测量,对处在与示教机器人的程序时不同位置的工件,采用能以相同的方式进行作业的形态补正机器人的动作。
相对位置补正
利用传感器补正机器人的方法有两种:绝对位置补正和相对位置补正。所谓绝对位置补正,就是传感器识别工件的绝对位置后通知机器人,机器人移动传感器所通知的位置。而所谓相对位置补正,就是由传感器识别工件从对机器人的程序进行示教的时刻起偏离多少的偏差量(相对位置)后通知机器人,机器人加入了传感器所通知的偏差量而移动到程序中所示教的位置。iRVision 进行后者的相对位置补正。
基准位置和实测位置
工件的偏差量是为进行机器人位置的补正而被使用的,所以将其叫做“补正量”或者“补偿数据”。补偿数据根据进行机器人程序示教时的工件位置和现在的工件位置而计算出。我们将进行机器人程序示教时的工件位置叫做“基准位置”,将现在的工件位置叫做“实测位置”。基准位置与实测位置之差就是“补偿数据”。基准位置,在进行机器人程序示教时由iRVision 进行测量,并被存储在iRVision 的内部。我们将基准位置教给iRVision 的操作叫做“基准位置设定”。
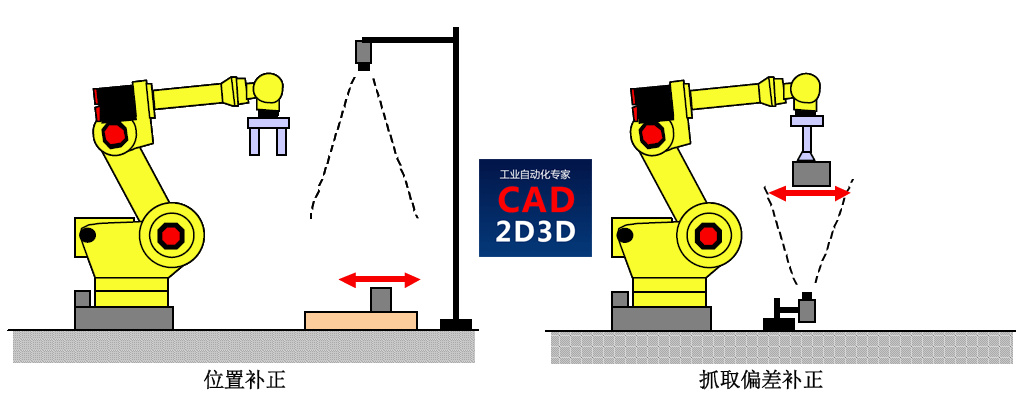
2.3 位置补正和抓取偏差补正
补正机器人的形态大致上有两种:“位置补正”和“抓取偏差补正”。iRVision 对应这两种补正方法。
位置补正
用相机观察放置在工作台等上的工件,测量工件偏离多少而被放置,以能够对偏离放置的工件正确进行作业(譬如抬起)的方式补正机器人的动作。
抓取偏差补正
利用相机观察在机器人偏离的状态下抓取的工件,测量偏离多少而抓取,以能够对偏离抓取的工件正确进行作业(譬如放置)的方式补正机器人的动作。
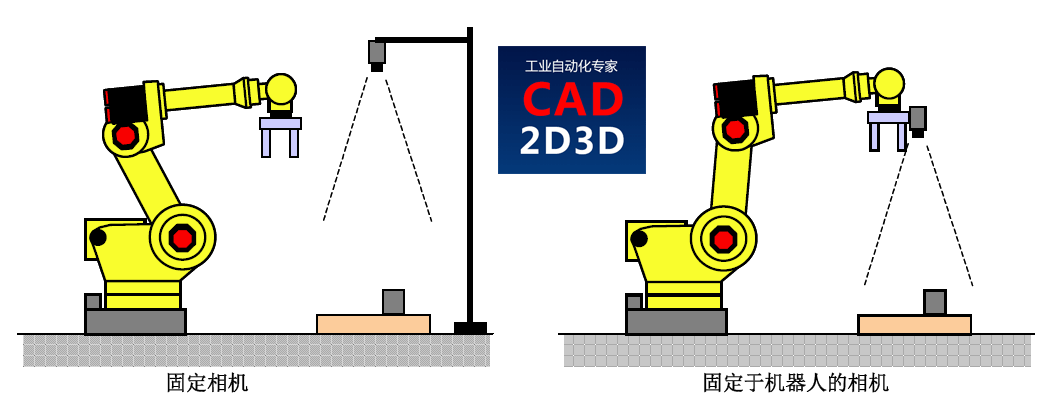
2.4 固定相机和固定于机器人的相机
相机的设置方法,包括“固定相机”方式和“固定于机器人的相机”方式。iRVision 对应这两种相机设置方法。
固定相机
将相机固定设置在架座等上。相机始终从相同距离观察相同部位。可以与机器人进行其它作业期间并行地进行视觉的测量,因而具有缩短总体周期时间的优点。利用固定相机观察放置在工作台等上的工件而进行机器人动作补正的补正方法,就是位置补正。伸到固定相机前对机器人把持的工件进行测量,将该工件正确放置到规定位置的补正方法,就是抓取偏差补正。
固定于机器人的相机
将相机设置在机器人的手腕部。通过移动机器人,可以利用1 台相机对不同场所进行测量,或者改变工件与相机的距离。固定于机器人的相机的情况下,iRVision 考虑机器人移动造成的相机的移动部分而计算工件的位置。利用固定于机器人的相机观察放置在工作台等上的工件而进行机器人动作补正的补正方法,就是位置补正。
更多 FANUC机器人视觉 内容请参见操作说明书,具体下载地址见页面底部 下载链接。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1572.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 相较于医生老师,机械工程师应该是最轻松的工作吧
相较于医生老师,机械工程师应该是最轻松的工作吧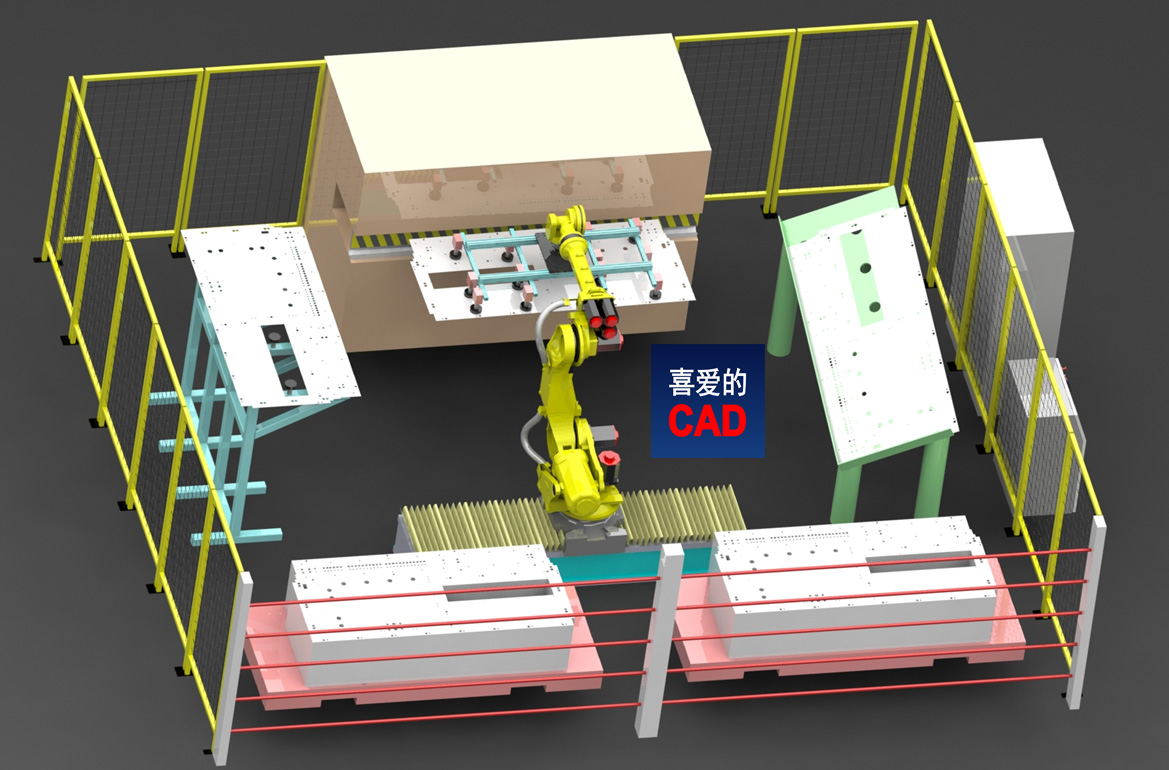 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案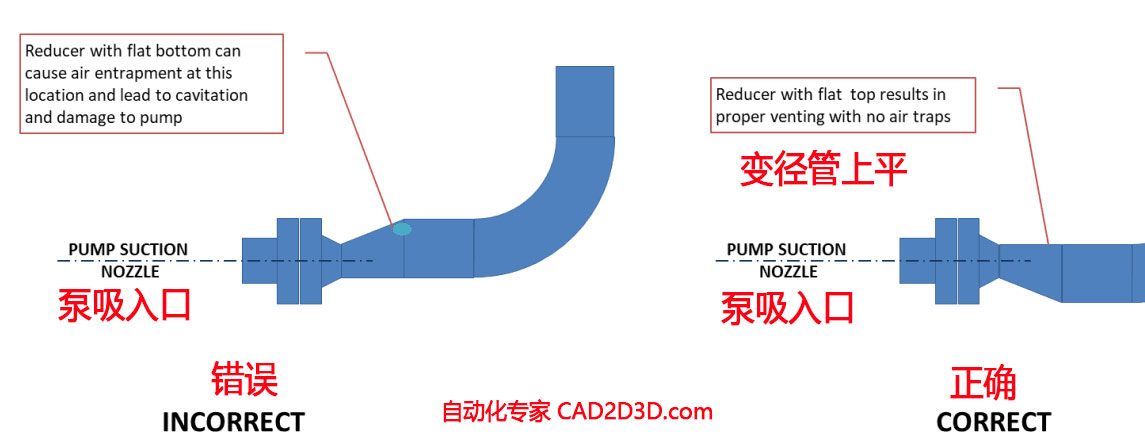 离心泵入口管道布置原则,变径管要求上平,避免入口管道内积聚气泡
离心泵入口管道布置原则,变径管要求上平,避免入口管道内积聚气泡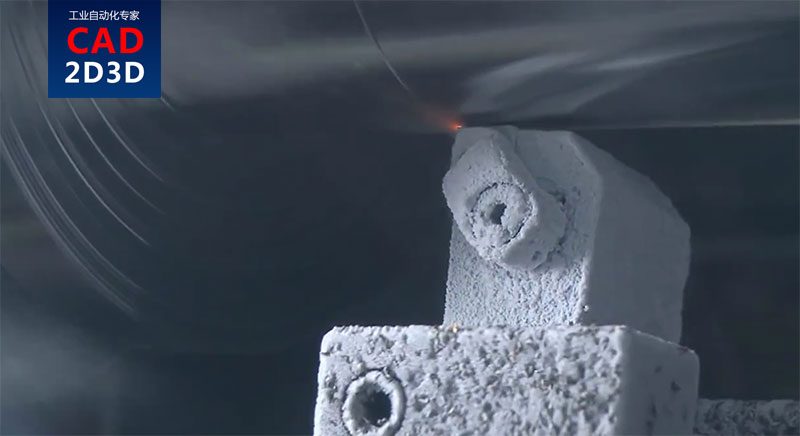 厉害,国外-160℃低温深冷切削,对刀具耐低温性能要求极高
厉害,国外-160℃低温深冷切削,对刀具耐低温性能要求极高 大师之路《工业机器人系统集成&自动化生产线方案设计大师》教材免费下载
大师之路《工业机器人系统集成&自动化生产线方案设计大师》教材免费下载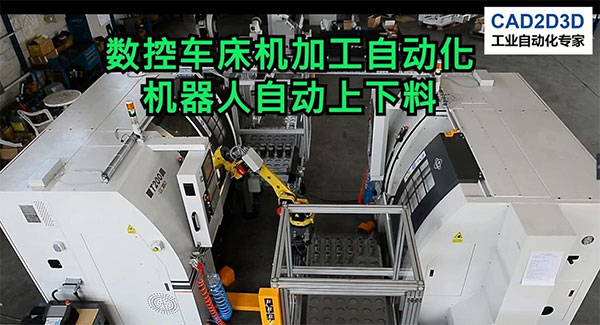 车床机加工自动化单元,老板用了机器人之后,每天的工作就剩数钱
车床机加工自动化单元,老板用了机器人之后,每天的工作就剩数钱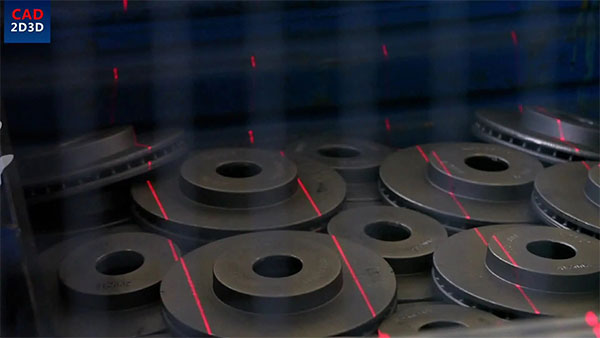 3D视觉定位,机器人乱料取件,有了眼睛,机器和人还有区别吗?
3D视觉定位,机器人乱料取件,有了眼睛,机器和人还有区别吗? 大开眼界,机器人456轴内部结构,56轴变向同步带传动
大开眼界,机器人456轴内部结构,56轴变向同步带传动更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载