
与
传感器变送器 相关商品:
查看所有与
传感器变送器 相关商品 >>
 米科超声波雷达液位计传感变送器一体分体式水位控制器物位料位计
米科超声波雷达液位计传感变送器一体分体式水位控制器物位料位计  2088榔头型压力变送器 4-20mA RS485防爆型压力变送器 压力传感器
2088榔头型压力变送器 4-20mA RS485防爆型压力变送器 压力传感器  防爆型数显单晶硅差压变送器压力变送器高精度传感器4-20mAHART
防爆型数显单晶硅差压变送器压力变送器高精度传感器4-20mAHART 3.5 码垛拆垛自动化生产线
3.5.1 码垛拆垛基础知识
码垛就是将工件按规定的规则摆放在一起。拆垛就是讲成堆的工件逐个取下,拆垛可能涉及到工件位置有偏差的取件,可能要配置视觉识别。相对来说,码垛较简单,拆垛较复杂。

图84 机器人码垛
位置随机的工件拆垛,需要使用视觉识别系统,可以自动识别工件位置,引导机器人准确抓取。

图85 视觉识别
3.5.2 码垛节拍时序
码垛机器人只有4轴,速度很快,通常完成A→B单次码垛只需要5s。
3.5.3 码垛拆垛自动化配套设备详述
3.5.3.1 码垛专用4轴机器人
简单的码垛和拆垛使用4轴码垛专用机器人即可,而为之随机的工件拆垛,由于存在XYZ角度方向的偏差,因此还需要配置6轴机器人。
码垛版4轴机器人的特点:机器人末端TCP点永远竖直朝下,运动半径较大,搬运重量较大,速度较快。

图86 码垛机器人
3.5.3.2 码垛手爪
对于纸箱可以采用吸盘,编织袋等可以采用抱爪,其他外表面较硬的工件可以采用气缸夹紧。
下面是码垛手爪,关节运动,由框架、气缸、同步连杆机构、手爪等组成。
码垛抱爪3D模型下载:https://www.cad2d3d.com/post-1414.html

图87 码垛手爪
3.5.3.3 输送线
码垛生产线通常是会用皮带输送机和辊筒输送线。
未完待续 ~
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注微信公众号 喜爱的CAD,私信回复以下关键字:
1575暗号
即可自动获取暗号,输入的候别忘记数字后面的暗号两个字。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1575.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频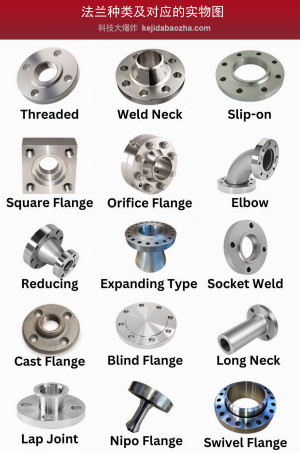 法兰类型及对应的实物图,各种法兰对应的中英文名称
法兰类型及对应的实物图,各种法兰对应的中英文名称- 在线文件转换器,PDF转Word,图像格式转换,视频格式转换
 桁架机械手安装调试太难了,精度要求那么高,我们根本干不了
桁架机械手安装调试太难了,精度要求那么高,我们根本干不了 方程和Equation,方程的含义至今我也不理解,但英文单词Equation让我茅塞顿开,这就是为什么要学习英语的原因
方程和Equation,方程的含义至今我也不理解,但英文单词Equation让我茅塞顿开,这就是为什么要学习英语的原因- 钢材牌号和统一数字代号之间的对应关系,304对应06Cr19Ni10,304L对应022Cr19Ni10,316对应06Cr17Ni12Mo2,316L对应022Cr17Ni12Mo2
- FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
- 机加工自动化生产线方案设计大师,详细介绍生产线形式、料仓、物流转运、手爪、在线测量、工装夹具的结构形式和设计方法
- 方案大师:2.4 自动化生产线主要设备、2.4.1 主机设备、2.4.2 辅助设备
 长春一汽万吨锻造全自动化生产线,没想到最先进的锻造线在东北
长春一汽万吨锻造全自动化生产线,没想到最先进的锻造线在东北
 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载